You might also like
- Structural Mechanics Laboratory: Project ReportDocument10 pagesStructural Mechanics Laboratory: Project ReportJayanth KumarNo ratings yet
- Approximation Method Feb 2021 2Document62 pagesApproximation Method Feb 2021 2krishna prasad ghantaNo ratings yet
- Control Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud) PDFDocument183 pagesControl Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud) PDFShakil Ahmed100% (1)
- Control Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud)Document183 pagesControl Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud)Anik PaulNo ratings yet
- Ch2 1Document7 pagesCh2 1xmtqnkn8vjNo ratings yet
- Chap 14Document104 pagesChap 14noscribdyoucantNo ratings yet
- Modeling, Simulation and Control of A Robotic Arm PDFDocument7 pagesModeling, Simulation and Control of A Robotic Arm PDFshivaramreddyNo ratings yet
- Modeling, Simulation and Control of A Robotic ArmDocument7 pagesModeling, Simulation and Control of A Robotic ArmaseptaNo ratings yet
- Assignment 3Document2 pagesAssignment 3OsamaZaidNo ratings yet
- Two-Degree Freedom Systems AnalysisDocument122 pagesTwo-Degree Freedom Systems AnalysiswanpudinNo ratings yet
- Exp01 EEE318Document7 pagesExp01 EEE318Abid AbdullahNo ratings yet
- Paper ResonanceDocument8 pagesPaper ResonanceQunalNo ratings yet
- Introduction to Single Degree of Freedom SystemsDocument99 pagesIntroduction to Single Degree of Freedom SystemsJura PateregaNo ratings yet
- MEG 505.1 - Lecture Notes-1Document50 pagesMEG 505.1 - Lecture Notes-1Destin Chinedum OsanekuNo ratings yet
- Vibration AnalysisDocument18 pagesVibration AnalysisSangolla NarahariNo ratings yet
- Undamped Free Vibration of Single Dof Systems: Dr.B.Santhosh Department of Mechanical EngineeringDocument3 pagesUndamped Free Vibration of Single Dof Systems: Dr.B.Santhosh Department of Mechanical EngineeringSREENATH S.SNo ratings yet
- ch3 Free Damped Vibration of SDOFDocument15 pagesch3 Free Damped Vibration of SDOFMahmoud Abdelghafar ElhussienyNo ratings yet
- Sweeney MECH610 ProjectDocument19 pagesSweeney MECH610 Projectعبدالرحمن احمدNo ratings yet
- Module Force VibrationDocument6 pagesModule Force VibrationAlamsyah AkbarNo ratings yet
- 1 Single Degree of Freedom (SDOF) Systems: James MW Brownjohn, University of Plymouth, January 2005Document99 pages1 Single Degree of Freedom (SDOF) Systems: James MW Brownjohn, University of Plymouth, January 2005Amandeep SinghNo ratings yet
- STRC201 Sdof JMWB PDFDocument99 pagesSTRC201 Sdof JMWB PDFAkash ChandraNo ratings yet
- QLabs Controls Instructor Resources Sample QUBE Servo 2 Position Control PDFDocument6 pagesQLabs Controls Instructor Resources Sample QUBE Servo 2 Position Control PDFBite RamanNo ratings yet
- (0) and (0) 0 = = ζ ζ ζ (0) 0.15, 2 / sec 1/ 2 2 2, 1 where /, / (2) = = = = = Document1 page(0) and (0) 0 = = ζ ζ ζ (0) 0.15, 2 / sec 1/ 2 2 2, 1 where /, / (2) = = = = = dust4lifeNo ratings yet
- Mechanical Systems Lecture Dynamics and OscillationsDocument6 pagesMechanical Systems Lecture Dynamics and OscillationsRogelioB.AlobIINo ratings yet
- Analysis of Three-Freedom Degree SystemDocument31 pagesAnalysis of Three-Freedom Degree SystemIsnardo CadenaNo ratings yet
- DRG Sesi 4 SDoF Forced VibrationDocument10 pagesDRG Sesi 4 SDoF Forced VibrationanggaNo ratings yet
- Dynamic Analysis Guide PDFDocument14 pagesDynamic Analysis Guide PDFDiksith WilliamNo ratings yet
- Dynamic Analysis Guide PDFDocument14 pagesDynamic Analysis Guide PDFhjklmlkNo ratings yet
- Dynamic Analysis GuideDocument14 pagesDynamic Analysis GuideMULAGONDLA DINESH REDDYNo ratings yet
- Dynamic Analysis GuideDocument14 pagesDynamic Analysis GuideEduardo LópezNo ratings yet
- Linear Dynamic Analysis Guide with DampingDocument14 pagesLinear Dynamic Analysis Guide with DampingPankajDhobleNo ratings yet
- Dynamic Analysis GuideDocument14 pagesDynamic Analysis GuideKumar NishantNo ratings yet
- Dynamic Analysis Guide PDFDocument14 pagesDynamic Analysis Guide PDFJuniorNo ratings yet
- Dynamic Analysis Guide PDFDocument14 pagesDynamic Analysis Guide PDFVijay PNo ratings yet
- Dynamic Analysis Guide PDFDocument14 pagesDynamic Analysis Guide PDFABDULLAHNo ratings yet
- Linear Dynamic Analysis Guide with DampingDocument14 pagesLinear Dynamic Analysis Guide with Dampingsfrancois21100% (1)
- Dynamic Analysis GuideDocument14 pagesDynamic Analysis GuiderihabNo ratings yet
- Dynamic Analysis GuideDocument14 pagesDynamic Analysis Guidemirza_munir_baig995No ratings yet
- Linear Dynamic Analysis Guide with DampingDocument14 pagesLinear Dynamic Analysis Guide with DampingasifNo ratings yet
- Damping: A Guide To Linear Dynamic Analysis WithDocument14 pagesDamping: A Guide To Linear Dynamic Analysis WithThyaga RajNo ratings yet
- Linear Dynamic Analysis Guide with DampingDocument14 pagesLinear Dynamic Analysis Guide with DampingDiksith WilliamNo ratings yet
- Linear Dynamic Analysis Guide with DampingDocument14 pagesLinear Dynamic Analysis Guide with DampingR Siva KumaranNo ratings yet
- Introduction to Damping in Free and Forced VibrationsDocument10 pagesIntroduction to Damping in Free and Forced Vibrationsmanindra haldarNo ratings yet
- Chapter-2 Viscous DampingDocument32 pagesChapter-2 Viscous DampingMuhammad haider AyazNo ratings yet
- Problem Set 1Document2 pagesProblem Set 1Uday RameshNo ratings yet
- Mechanical Vibrations Introduction - Types, Elements, Equations of MotionDocument36 pagesMechanical Vibrations Introduction - Types, Elements, Equations of MotionMudit JainNo ratings yet
- Topic 4. MECHANICAL VIBRATIONS Lecture NotesDocument13 pagesTopic 4. MECHANICAL VIBRATIONS Lecture NotesOrbital TechNo ratings yet
- Mod 6Document104 pagesMod 6Sérgio CustódioNo ratings yet
- Lecture 2 Second Lecture 2023Document21 pagesLecture 2 Second Lecture 2023yakwetuNo ratings yet
- 4.0 Expt No 04Document3 pages4.0 Expt No 04YASH KHATPENo ratings yet
- HW2 PDFDocument4 pagesHW2 PDFAshishNo ratings yet
- Structural Dynamics Fundamentals in <40 CharactersDocument12 pagesStructural Dynamics Fundamentals in <40 CharactersrajNo ratings yet
- Solutions: Solutions Manual For Mechanical Vibration Analysis Uncertainties and Control 3Rd Edition BenaroyaDocument81 pagesSolutions: Solutions Manual For Mechanical Vibration Analysis Uncertainties and Control 3Rd Edition BenaroyaANTONIO RODRIGUESNo ratings yet
- Control Systems PDFDocument24 pagesControl Systems PDFlum_78No ratings yet
- Lecture 06 Lti Differential and Difference SystemsDocument24 pagesLecture 06 Lti Differential and Difference SystemsramaNo ratings yet
- April 2009 FinalDocument10 pagesApril 2009 FinalAdalric LeungNo ratings yet
- Control system labDocument15 pagesControl system labhassan ullah khanNo ratings yet
- Phys130 EA02 Midterm SolutionDocument16 pagesPhys130 EA02 Midterm SolutionChristian MartinezNo ratings yet
- Introduction to Non-Linear Mechanics. (AM-11), Volume 11From EverandIntroduction to Non-Linear Mechanics. (AM-11), Volume 11No ratings yet
- Harnessing Bistable Structural Dynamics: For Vibration Control, Energy Harvesting and SensingFrom EverandHarnessing Bistable Structural Dynamics: For Vibration Control, Energy Harvesting and SensingNo ratings yet
- Lecture 3 Data Entry and PreparationDocument29 pagesLecture 3 Data Entry and PreparationAddo MawuloloNo ratings yet
- Lecture 2 Spatial Data Types and RepresentationDocument32 pagesLecture 2 Spatial Data Types and RepresentationAddo MawuloloNo ratings yet
- Introduction to GIS Fundamentals and ApplicationsDocument57 pagesIntroduction to GIS Fundamentals and ApplicationsAddo MawuloloNo ratings yet
- Cve 414 - Environmental Engineering: Frank Owusu AdjeiDocument40 pagesCve 414 - Environmental Engineering: Frank Owusu AdjeiAddo MawuloloNo ratings yet
- Spatial Referencing BasicsDocument35 pagesSpatial Referencing BasicsAddo Mawulolo100% (1)
- Depreciation Methods Depreciation MethodsDocument31 pagesDepreciation Methods Depreciation MethodsAddo Mawulolo100% (1)
- Construction AbitrationDocument46 pagesConstruction Abitrationastapathy06No ratings yet
- Tender ProcessDocument35 pagesTender ProcessAli AsadNo ratings yet
- Lecture 5 Fundamental of Remote SensingDocument50 pagesLecture 5 Fundamental of Remote SensingAddo MawuloloNo ratings yet
- CH 2Document33 pagesCH 2Ahmad Bello DogarawaNo ratings yet
- Assignment For Engineering Economy: Submission SUNDAY. APRIL 25, 2021 TIME: 12:35PMDocument5 pagesAssignment For Engineering Economy: Submission SUNDAY. APRIL 25, 2021 TIME: 12:35PMAddo MawuloloNo ratings yet
- CH 10Document37 pagesCH 10Nikhil SharmaNo ratings yet
- What Small and Emerging Contractors Need To Know: Understanding Dispute Resolution Options in The Construction IndustryDocument17 pagesWhat Small and Emerging Contractors Need To Know: Understanding Dispute Resolution Options in The Construction IndustryDasun IsharaNo ratings yet
- Project Delivery Methods: Board of Trustees April 12, 2005Document31 pagesProject Delivery Methods: Board of Trustees April 12, 2005Addo MawuloloNo ratings yet
- Construction AbitrationDocument46 pagesConstruction Abitrationastapathy06No ratings yet
- Tender ProcessDocument35 pagesTender ProcessAli AsadNo ratings yet
- Module4 Sdynamics Rajeshsir 140806045959 Phpapp02 PDFDocument84 pagesModule4 Sdynamics Rajeshsir 140806045959 Phpapp02 PDFKirti Chandra JoshiNo ratings yet
- 047 Project Tendering 2016 - 04 - 01Document12 pages047 Project Tendering 2016 - 04 - 01kian hong100% (1)
- Types and Causes of Construction Claims IJERTV3IS120582Document4 pagesTypes and Causes of Construction Claims IJERTV3IS120582Yelisa Danny DenzelNo ratings yet
- Types and Causes of Construction Claims IJERTV3IS120582Document4 pagesTypes and Causes of Construction Claims IJERTV3IS120582Yelisa Danny DenzelNo ratings yet
- Understanding Dispute ResolutionDocument18 pagesUnderstanding Dispute ResolutionAddo MawuloloNo ratings yet
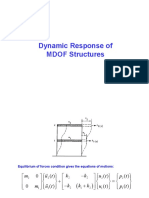
- Dynamic Response of MDOF StructuresDocument7 pagesDynamic Response of MDOF StructuresAddo MawuloloNo ratings yet
- Project Management - CPM/PERT: Dr. M Varaprasada RaoDocument125 pagesProject Management - CPM/PERT: Dr. M Varaprasada RaoAddo MawuloloNo ratings yet
- Project EvaluationDocument351 pagesProject EvaluationAddo MawuloloNo ratings yet
- 1aexcellent - Composition of Earth Structure of The EarthDocument17 pages1aexcellent - Composition of Earth Structure of The EarthAddo MawuloloNo ratings yet
- 2b Structural DynamicsDocument12 pages2b Structural DynamicsAddo MawuloloNo ratings yet
- Project Planning and ControlDocument34 pagesProject Planning and ControlArshan BhullarNo ratings yet
- 1b Excellent - Earthquakes - ReviewDocument55 pages1b Excellent - Earthquakes - ReviewAddo MawuloloNo ratings yet
- 1b Excellent - Earthquakes - ReviewDocument55 pages1b Excellent - Earthquakes - ReviewAddo MawuloloNo ratings yet
- POF QuestionsDocument9 pagesPOF Questionsrona putriNo ratings yet
- Self-Balancing Two-Wheeler Model Using GyroscopeDocument29 pagesSelf-Balancing Two-Wheeler Model Using GyroscopenaveenNo ratings yet
- MEC291 Mechanics and Materials Laboratory ManualDocument16 pagesMEC291 Mechanics and Materials Laboratory ManualLAILATUL ATILA0% (1)
- Circular MotionDocument28 pagesCircular MotionShapnil FinneyNo ratings yet
- Duct Design Calculation Sheet: Note:-Take the Value of α & β from above table use in the calculationDocument9 pagesDuct Design Calculation Sheet: Note:-Take the Value of α & β from above table use in the calculationchagar_harshNo ratings yet
- Angle of Repose and Uniform SlipDocument15 pagesAngle of Repose and Uniform SlipDavid Lancelot PiadNo ratings yet
- Projectile MotionDocument74 pagesProjectile MotionAlvin Tung Kwong ChoongNo ratings yet
- Physics TestDocument7 pagesPhysics TestThanh Hien Truong ThiNo ratings yet
- Plume of Smoke Problem 2015Document45 pagesPlume of Smoke Problem 2015Carmen DraghiaNo ratings yet
- Applications of Laws of MotionDocument24 pagesApplications of Laws of Motiondiamond1880% (2)
- Sound Waves Lecture PPT (Wave Motion Part 2)Document37 pagesSound Waves Lecture PPT (Wave Motion Part 2)Leilani Manalaysay100% (1)
- Bernoulli Eqn AppsDocument5 pagesBernoulli Eqn AppsSata AjjamNo ratings yet
- Newtons Laws of Motion MCQDocument17 pagesNewtons Laws of Motion MCQApex Institute92% (12)
- Surge AnalysisDocument2 pagesSurge AnalysisPraveen ChaudharyNo ratings yet
- Vibration of StringsDocument23 pagesVibration of StringsFrank OctavioNo ratings yet
- 11 Physics - Gravitation - NotesDocument5 pages11 Physics - Gravitation - Notesrahul pingaleNo ratings yet
- Conservation of Momentum and Energy in Elastic CollisionsDocument6 pagesConservation of Momentum and Energy in Elastic CollisionsJoel SolomonNo ratings yet
- Curves and Superelevation OptimizationDocument43 pagesCurves and Superelevation OptimizationGunjan KumarNo ratings yet
- Manning's Roughness Coefficient (N)Document11 pagesManning's Roughness Coefficient (N)Khurram MumtazNo ratings yet
- Chapter 02 Solutions 7th GiancoliDocument30 pagesChapter 02 Solutions 7th GiancoliHetal Gandhi100% (3)
- Spin-It: Optimizing Moment of Inertia For Spinnable ObjectsDocument10 pagesSpin-It: Optimizing Moment of Inertia For Spinnable ObjectsEduardoNo ratings yet
- Velocity and SpeedDocument15 pagesVelocity and SpeedGalang AlphaNo ratings yet
- Fanuc G68 Rotate Co-Ordinate System For Milling Program ExampleDocument3 pagesFanuc G68 Rotate Co-Ordinate System For Milling Program ExampleHarshal DhawasNo ratings yet
- Momentum LabDocument3 pagesMomentum LabSam Anderson50% (4)
- Conservative and Non-Conservative Forces ExplainedDocument2 pagesConservative and Non-Conservative Forces ExplainedUsman Samuel BabalolaNo ratings yet
- Bài 5 - Lateral Motion (Stick Fixed) (2008)Document12 pagesBài 5 - Lateral Motion (Stick Fixed) (2008)neiht_ksNo ratings yet
- Properties of SoundDocument20 pagesProperties of SoundRichard EstradaNo ratings yet
- Vibration AbsorbersDocument33 pagesVibration AbsorbersAsif Khan NiaziNo ratings yet
- OYO LBsDocument18 pagesOYO LBsdavNo ratings yet
- Section 4.1 WorksheetDocument2 pagesSection 4.1 WorksheetDanayla WoodsNo ratings yet