You might also like
- Blender Source Code NotesDocument5 pagesBlender Source Code NotesRicky GNo ratings yet
- The Security Risk of Database Deployment FailuresDocument29 pagesThe Security Risk of Database Deployment Failuresapi-233106688No ratings yet
- Facebook Root Cause AnalysisDocument13 pagesFacebook Root Cause AnalysisdhayaNo ratings yet
- Disk FailuresDocument13 pagesDisk FailuresDimas PrasetyoNo ratings yet
- Computers in Industry: Christoph M. Flath, Nikolai SteinDocument10 pagesComputers in Industry: Christoph M. Flath, Nikolai SteinecsudcaNo ratings yet
- Failure Trends in Hard DrivesDocument13 pagesFailure Trends in Hard DrivesDean FooteNo ratings yet
- A Survey Paper On Hard Disk Failure Prediction Using Machine LearningDocument6 pagesA Survey Paper On Hard Disk Failure Prediction Using Machine LearningIJRASETPublicationsNo ratings yet
- CLOSER19 EdgeClusterDocument14 pagesCLOSER19 EdgeClusterSepta CahyaniNo ratings yet
- A Graph Based Approach To Manage CAE-Data in A Data-LakeDocument6 pagesA Graph Based Approach To Manage CAE-Data in A Data-LakeajayvgNo ratings yet
- Liang 2020Document10 pagesLiang 2020Rupes ChaudharyNo ratings yet
- Lean Data in Manufacturing Systems: Using Artificial Intelligence For Decentralized Data Reduction and Information ExtractionDocument6 pagesLean Data in Manufacturing Systems: Using Artificial Intelligence For Decentralized Data Reduction and Information ExtractioncamiloagduNo ratings yet
- Google Wide Profiling: A Continuous Profiling Infrastructure For Data CentersDocument15 pagesGoogle Wide Profiling: A Continuous Profiling Infrastructure For Data CentersChintan_ShahNo ratings yet
- Forecasting Sales Using AzureDocument7 pagesForecasting Sales Using AzureIJRASETPublicationsNo ratings yet
- Content ServerDocument5 pagesContent ServerFrancisco Medina RiveraNo ratings yet
- Sbac Pad 2022Document11 pagesSbac Pad 2022meloNo ratings yet
- DownloadDocument9 pagesDownloadNISHANT TEKALENo ratings yet
- An Approach For Assembly Process Case Discovery Using Multimediainformation SourceDocument15 pagesAn Approach For Assembly Process Case Discovery Using Multimediainformation SourceAllagui AmalNo ratings yet
- Is Mining Ready For Prescriptive Maintenance - Mining Magazine July 2020Document3 pagesIs Mining Ready For Prescriptive Maintenance - Mining Magazine July 2020Fran jimenezNo ratings yet
- Bitwise Neural NetworkDocument5 pagesBitwise Neural NetworkGod GamingNo ratings yet
- VSM 4 Plug-And-play Sensor Platform For Legacy Industrial Machine MonitoringDocument4 pagesVSM 4 Plug-And-play Sensor Platform For Legacy Industrial Machine MonitoringElif CeylanNo ratings yet
- A New Approach For Exactness Agriculture Monitoring Using IOT&ESP8266Document5 pagesA New Approach For Exactness Agriculture Monitoring Using IOT&ESP8266sarkochileNo ratings yet
- A New Approach For Exactness Agriculture Monitoring Using IOT&ESP8266Document5 pagesA New Approach For Exactness Agriculture Monitoring Using IOT&ESP8266sarkochileNo ratings yet
- A New Approach For Exactness Agriculture Monitoring Using IOT&ESP8266Document5 pagesA New Approach For Exactness Agriculture Monitoring Using IOT&ESP8266International Journal of Engineering and TechniquesNo ratings yet
- 7 Waystogetgreedywithdata 1592348749687Document6 pages7 Waystogetgreedywithdata 1592348749687Jim HerwigNo ratings yet
- Wireless Caching: Technical Misconceptions and Business BarriersDocument19 pagesWireless Caching: Technical Misconceptions and Business BarriersnangaayissiNo ratings yet
- A Sequence - To - Sequence Approach For Remaining Useful Lifetime Estimation Using Attention Augmented Bidirectional LSTMDocument18 pagesA Sequence - To - Sequence Approach For Remaining Useful Lifetime Estimation Using Attention Augmented Bidirectional LSTMowais khanNo ratings yet
- Uptime Institute Global Data Center Survey 2023 Executive SummaryDocument10 pagesUptime Institute Global Data Center Survey 2023 Executive SummaryCarlos J. Buznego NiochetNo ratings yet
- Research Papers On Data CenterDocument5 pagesResearch Papers On Data Centerefjk5y50100% (1)
- Machine Learning-Based Demand Forecasting in Supply ChainsDocument20 pagesMachine Learning-Based Demand Forecasting in Supply ChainsUdbhav VikasNo ratings yet
- Modern Database Management, Global Edition - (Part I The Context of Database Management)Document1 pageModern Database Management, Global Edition - (Part I The Context of Database Management)Umair AijazNo ratings yet
- SciencedirectDocument5 pagesSciencedirectvincent BarreauNo ratings yet
- Employing A UAV Unit For The Data Dissemination Protocol in VanetDocument6 pagesEmploying A UAV Unit For The Data Dissemination Protocol in VanetInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Research Paper Network Attached StorageDocument4 pagesResearch Paper Network Attached Storagehjqojzakf100% (1)
- 0405baxt Futuro de CBMDocument2 pages0405baxt Futuro de CBMAcademia de ConfiabilidadNo ratings yet
- Splitting Large Medical Data Sets Based On Normal Distribution in Cloud EnvironmentDocument6 pagesSplitting Large Medical Data Sets Based On Normal Distribution in Cloud EnvironmentIJRASETPublicationsNo ratings yet
- Assessing Data Quality of Annotations With Krippendorff's Alpha For Applications in Computer VisionDocument9 pagesAssessing Data Quality of Annotations With Krippendorff's Alpha For Applications in Computer VisionNirmal KumawatNo ratings yet
- Electric Power Systems Research: M. Coppo, P. Pelacchi, F. Pilo, G. Pisano, G.G. Soma, R. TurriDocument14 pagesElectric Power Systems Research: M. Coppo, P. Pelacchi, F. Pilo, G. Pisano, G.G. Soma, R. TurrijigneshgbhattNo ratings yet
- Dataset DistillationDocument24 pagesDataset DistillationPixelwarNo ratings yet
- SPK 5Document11 pagesSPK 5Nabiilah Arlita PutriyanaNo ratings yet
- 2022-The Implementation of Industry 4.0 in Manufacturing From Lean Manufacturing To Product DesignDocument17 pages2022-The Implementation of Industry 4.0 in Manufacturing From Lean Manufacturing To Product DesignFrank Joel Herrera ApaesteguiNo ratings yet
- Neurocomputing: Xin Gao, Fang Deng, Xianghu YueDocument8 pagesNeurocomputing: Xin Gao, Fang Deng, Xianghu YueAndre Van ZylNo ratings yet
- Resource Allocation and Trust Computing For Blockchain-Enabled Edge Computing SystemDocument1 pageResource Allocation and Trust Computing For Blockchain-Enabled Edge Computing SystemmmrNo ratings yet
- Disk Failures PDFDocument13 pagesDisk Failures PDFPravin SasatteNo ratings yet
- EPINET - G&G Information Resource Management in ONGC: 10 Biennial International Conference & ExpositionDocument13 pagesEPINET - G&G Information Resource Management in ONGC: 10 Biennial International Conference & ExpositionGowri J BabuNo ratings yet
- Blockchain Based DisaggregatedDocument4 pagesBlockchain Based DisaggregatedInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Modular Data Centers How To Design ThemDocument9 pagesModular Data Centers How To Design ThemSarah AzarNo ratings yet
- 04 Machine Learning Maintenance Predictive Cline2017Document7 pages04 Machine Learning Maintenance Predictive Cline2017Napoleón Hernandez VenegasNo ratings yet
- 1997-Application-Controlled Demand Paging ForDocument12 pages1997-Application-Controlled Demand Paging ForsanchezNo ratings yet
- Industrial Remaining Useful Life Prediction by Partial Observation Using Deep Learning With Supervised AttentionDocument11 pagesIndustrial Remaining Useful Life Prediction by Partial Observation Using Deep Learning With Supervised AttentionYannick CarrascoNo ratings yet
- Privacy-Preserving Public Auditing Protocol For Low-Performance End Devices in CloudDocument12 pagesPrivacy-Preserving Public Auditing Protocol For Low-Performance End Devices in CloudPriyankaNo ratings yet
- Precisions Assembly Is A Unique BranchDocument6 pagesPrecisions Assembly Is A Unique Branchlabemanza03No ratings yet
- Optimized Error Detection in Cloud User For Networking ServicesDocument7 pagesOptimized Error Detection in Cloud User For Networking ServicesRahul SharmaNo ratings yet
- VerificationEnvironmentofDualPortRAM AReviewDocument7 pagesVerificationEnvironmentofDualPortRAM AReviewBC RNo ratings yet
- Federated LearningDocument15 pagesFederated LearningMichelle LeiNo ratings yet
- Computing in The Blink of An Eye: Current Possibilities For Edge Computing and Hardware-Agnostic ProgrammingDocument11 pagesComputing in The Blink of An Eye: Current Possibilities For Edge Computing and Hardware-Agnostic ProgrammingjoseNo ratings yet
- Scalable Data Storage For PV Monitoring Systems: 1 Anastasios Kladas 2 Bert Herteleer 3 Jan CappelleDocument5 pagesScalable Data Storage For PV Monitoring Systems: 1 Anastasios Kladas 2 Bert Herteleer 3 Jan Cappelleahmad hermawanNo ratings yet
- Big Data AnalytiDocument6 pagesBig Data Analytivivek thoratNo ratings yet
- Predictive Maintenance in Smart Factories: Architectures, Methodologies, and Use-casesFrom EverandPredictive Maintenance in Smart Factories: Architectures, Methodologies, and Use-casesTania CerquitelliNo ratings yet
- Embedded Deep Learning: Algorithms, Architectures and Circuits for Always-on Neural Network ProcessingFrom EverandEmbedded Deep Learning: Algorithms, Architectures and Circuits for Always-on Neural Network ProcessingNo ratings yet
- Test Bank For Immunology and Serology in Laboratory Medicine 4th Edition TurgeonDocument24 pagesTest Bank For Immunology and Serology in Laboratory Medicine 4th Edition TurgeonDavidLarsonDDSfgaq100% (42)
- Review QuestionsDocument5 pagesReview QuestionsAR EddingNo ratings yet
- Youtube CenterDocument966 pagesYoutube CenterGabriel SennNo ratings yet
- Equations of StateDocument11 pagesEquations of StateaguswiadiNo ratings yet
- Datasheet S6-GR1P (0,7-3,6) K-M Global V2.1 2022 08Document2 pagesDatasheet S6-GR1P (0,7-3,6) K-M Global V2.1 2022 08Fajar Alam PriambudyNo ratings yet
- MP 001 - 22 - PP - Esp - 00 - MP WT20X-WT30X-WT40X (3qyg06130) (SPN)Document242 pagesMP 001 - 22 - PP - Esp - 00 - MP WT20X-WT30X-WT40X (3qyg06130) (SPN)Honda almagrorepuestosNo ratings yet
- Sustainable DevelopmentDocument3 pagesSustainable DevelopmentAlabi OlawaleNo ratings yet
- 2000 - The Genetics of Mental IllnessDocument9 pages2000 - The Genetics of Mental Illnesssiempreviva84No ratings yet
- MOF Bimetalicos Producción BiodieselDocument9 pagesMOF Bimetalicos Producción BiodieselHilson ValdezNo ratings yet
- Write Your Answer in Each Activity in Your MAPEH NotebookDocument5 pagesWrite Your Answer in Each Activity in Your MAPEH NotebookbwahahaNo ratings yet
- Department of Labor: 05 097Document8 pagesDepartment of Labor: 05 097USA_DepartmentOfLaborNo ratings yet
- Vendor Registration DetailsDocument3 pagesVendor Registration DetailsSaroj KumarNo ratings yet
- Alarm Management KPI Utilizing IMS in Offshore PlatformsDocument91 pagesAlarm Management KPI Utilizing IMS in Offshore PlatformsbacabacabacaNo ratings yet
- W3schools: HTML5 IntroductionDocument7 pagesW3schools: HTML5 Introductionanon_723287062No ratings yet
- Copper-Alloy Plate and Sheet For Pressure Vessels, Condensers, and Heat ExchangersDocument7 pagesCopper-Alloy Plate and Sheet For Pressure Vessels, Condensers, and Heat ExchangersSharad KokateNo ratings yet
- Groups ABCD - Family Medicine End Block QuestionsDocument10 pagesGroups ABCD - Family Medicine End Block QuestionsHisham ChomanyNo ratings yet
- CloudCore Feature List 20180628Document13 pagesCloudCore Feature List 20180628samir YOUSIFNo ratings yet
- Texapon SFA (OPP)Document1 pageTexapon SFA (OPP)paromanikNo ratings yet
- International Piano Competition R. Schumann - Fondazione CariptDocument2 pagesInternational Piano Competition R. Schumann - Fondazione Caripttoritori88No ratings yet
- Quantum Physics NotesDocument1 pageQuantum Physics NotesChloe InnsNo ratings yet
- Hammarby SjojstadDocument14 pagesHammarby SjojstadAshim MannaNo ratings yet
- P7 - Test 3-Est 2023Document20 pagesP7 - Test 3-Est 2023QuíNo ratings yet
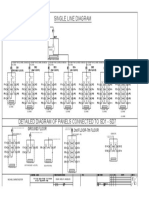
- Darms SLDDocument1 pageDarms SLDMichael DarmstaedterNo ratings yet
- Ebook Chem 2 Chemistry in Your World 2Nd Edition Hogg Test Bank Full Chapter PDFDocument28 pagesEbook Chem 2 Chemistry in Your World 2Nd Edition Hogg Test Bank Full Chapter PDFalankiet45olsq100% (13)
- (Asce) 0733 9445 (1990) 116:10 (2671) PDFDocument20 pages(Asce) 0733 9445 (1990) 116:10 (2671) PDFS LNo ratings yet
- 10664-Full TextDocument166 pages10664-Full TextMarlina PalopoNo ratings yet
- A Rapid CTAB DNA IsolationDocument6 pagesA Rapid CTAB DNA Isolationwaheed639No ratings yet
- PDF El Gran Manual Del Pastelero (Gastronomía Y Cocina)Document1 pagePDF El Gran Manual Del Pastelero (Gastronomía Y Cocina)paola lombanaNo ratings yet
- Oresome Handbook BCDDocument76 pagesOresome Handbook BCDlinmar7071No ratings yet