You might also like
- Stochastic Methods for Flow in Porous Media: Coping with UncertaintiesFrom EverandStochastic Methods for Flow in Porous Media: Coping with UncertaintiesNo ratings yet
- Hydro-Informatics Methods For Groundwater Simulation-Nastaran ZamaniDocument13 pagesHydro-Informatics Methods For Groundwater Simulation-Nastaran Zamanicopdeposu2071No ratings yet
- 1 s2.0 S0043135407004733 Main PDFDocument11 pages1 s2.0 S0043135407004733 Main PDFPaulo BrasilNo ratings yet
- Ann-Pso Aem DoreDocument15 pagesAnn-Pso Aem DoreSan ChinNo ratings yet
- Sustainability 10 02837 PDFDocument34 pagesSustainability 10 02837 PDFCristóbal Alberto Campos MuñozNo ratings yet
- Journal of Computational Physics: Xiaosong Sun, Mikio Sakai, Yoshinori YamadaDocument30 pagesJournal of Computational Physics: Xiaosong Sun, Mikio Sakai, Yoshinori YamadaMuhammad Adnan LaghariNo ratings yet
- Permeability Prediction and Construction of 3D Geological Model: Application of Neural Networks and Stochastic..Document9 pagesPermeability Prediction and Construction of 3D Geological Model: Application of Neural Networks and Stochastic..XagustNo ratings yet
- Simulation Study of Mass Transfer Coefficient in Slurry Bubble Column Reactor Using Neural NetworkDocument11 pagesSimulation Study of Mass Transfer Coefficient in Slurry Bubble Column Reactor Using Neural NetworkEmad ElsaidNo ratings yet
- Water 12 00679 v2Document21 pagesWater 12 00679 v2Talha.jNo ratings yet
- Nash ModelDocument23 pagesNash ModelJean Charles100% (1)
- s00521 020 04836 4 PDFDocument10 pagess00521 020 04836 4 PDFM Husnain ShahidNo ratings yet
- ReleasehistoryDocument37 pagesReleasehistoryjaumegomezNo ratings yet
- Flow ModelsDocument27 pagesFlow ModelsArvin BhurtunNo ratings yet
- Experimental Design For Estimating Parameters of Rate-Limited Mass Transfer: Analysis of Stream Tracer StudiesDocument11 pagesExperimental Design For Estimating Parameters of Rate-Limited Mass Transfer: Analysis of Stream Tracer Studieso_muratkazinovNo ratings yet
- Diff Rev1Document39 pagesDiff Rev1jaumegomezNo ratings yet
- Esmda ErtDocument38 pagesEsmda ErtjaumegomezNo ratings yet
- Water 11 00088 v2Document17 pagesWater 11 00088 v2Krishna KumarNo ratings yet
- Evaluation and Optimisation of Groundwater Observation Networks Using The Kriging MethodologyDocument10 pagesEvaluation and Optimisation of Groundwater Observation Networks Using The Kriging MethodologyShamsa KanwalNo ratings yet
- ReleasehistoryDocument37 pagesReleasehistoryjaumegomezNo ratings yet
- Nr4a3ugk643564 PDFDocument7 pagesNr4a3ugk643564 PDFPedroLancellotaNo ratings yet
- Parameterization and Parameter Estimation of Distributed ModelsDocument6 pagesParameterization and Parameter Estimation of Distributed Modelsmat506615No ratings yet
- Evaluating Hydrological Models For Deriving Water Resources in Peninsular SpainDocument36 pagesEvaluating Hydrological Models For Deriving Water Resources in Peninsular SpainSami QaddouraNo ratings yet
- Adaptive Rational Spectral Methods For The Linear Stability Analysis of Nonlinear Fourth-Order ProblemsDocument17 pagesAdaptive Rational Spectral Methods For The Linear Stability Analysis of Nonlinear Fourth-Order ProblemsSgk ManikandanNo ratings yet
- Urkedal,' A.T.: PaperDocument16 pagesUrkedal,' A.T.: PaperRosa K Chang HNo ratings yet
- Improving The Muskingum Flood Routing Method Using A Hybrid of Particle Swarm Optimization and Bat AlgorithmDocument21 pagesImproving The Muskingum Flood Routing Method Using A Hybrid of Particle Swarm Optimization and Bat AlgorithmSharad TiwariNo ratings yet
- Docu 13Document14 pagesDocu 13Franco CernaNo ratings yet
- CPK GW ModellingDocument12 pagesCPK GW ModellingBALJINDER SINGHNo ratings yet
- Predictive Modelling of Soils' Hydraulic Conductivity Using Artificial Neural Network and Multiple Linear RegressionDocument14 pagesPredictive Modelling of Soils' Hydraulic Conductivity Using Artificial Neural Network and Multiple Linear RegressionNicola Rabb RanataNo ratings yet
- Application of Response Surface Methodology and Central Composite RotatableDocument7 pagesApplication of Response Surface Methodology and Central Composite RotatableManishankar PandaNo ratings yet
- Can Machine Learning and Predictor Selection Algorithms Yield Reliable Stream Flow Prediction?Document10 pagesCan Machine Learning and Predictor Selection Algorithms Yield Reliable Stream Flow Prediction?malaya_mohantyNo ratings yet
- Caviedes 2012Document21 pagesCaviedes 2012Mariane de LizNo ratings yet
- Geostatistics Applied To Gas ReservoirsDocument2 pagesGeostatistics Applied To Gas ReservoirsHan Thinh NguyenNo ratings yet
- Groundwater Modeling With Machine Learning Techniques: Ljubljana Polje AquiferDocument8 pagesGroundwater Modeling With Machine Learning Techniques: Ljubljana Polje AquiferAnmol HarshNo ratings yet
- A Review On The Numerical Inversion Methods of Relative Permeability CurvesDocument6 pagesA Review On The Numerical Inversion Methods of Relative Permeability Curvesjsotofmet4918No ratings yet
- Artificial Neuron Models For Hydrological Modeling: Seema Narain and Ashu JainDocument5 pagesArtificial Neuron Models For Hydrological Modeling: Seema Narain and Ashu JainseemanarainNo ratings yet
- Presentation R1Document21 pagesPresentation R1tirumalachandrakala055No ratings yet
- Bridging Pore To Core-Scale Flow Properties Using Pore-Scale Modeling and Coreflood SimulationDocument12 pagesBridging Pore To Core-Scale Flow Properties Using Pore-Scale Modeling and Coreflood SimulationRosa K Chang HNo ratings yet
- Bugaets Et Al 2021 - Comparing The Runoff Decompositions of Small Testbed Catchments - End-Member Mixing Analysis Against Hydrological ModellingDocument26 pagesBugaets Et Al 2021 - Comparing The Runoff Decompositions of Small Testbed Catchments - End-Member Mixing Analysis Against Hydrological Modellingroneyazevedo15No ratings yet
- Ann GW Level PredictionDocument1 pageAnn GW Level PredictionSrinivas ChilakamarthiNo ratings yet
- Calculation of Metzner Constant For Double Helical Ribbon Impeller by Computational Fluid Dynamic MethodDocument7 pagesCalculation of Metzner Constant For Double Helical Ribbon Impeller by Computational Fluid Dynamic MethodUğur AydemirNo ratings yet
- Journal of Petroleum Science and Engineering: Kyungbook Lee, Jungtek Lim, Jonggeun Choe, Hyun Suk LeeDocument11 pagesJournal of Petroleum Science and Engineering: Kyungbook Lee, Jungtek Lim, Jonggeun Choe, Hyun Suk LeeYarisol Rivera ChàvezNo ratings yet
- Feature Importance Anifowose2019Document10 pagesFeature Importance Anifowose2019VeronicaNo ratings yet
- Matlab CodeDocument10 pagesMatlab Codesoheilvb6No ratings yet
- Numerical Solutions For Ow in Porous Media: J.G. Wang, C.F. Leung and Y.K. ChowDocument19 pagesNumerical Solutions For Ow in Porous Media: J.G. Wang, C.F. Leung and Y.K. ChowYongki Andita AimanNo ratings yet
- Grade Mixing Analysis in Steelmaking Tundishusing Different Turbulence ModelsDocument6 pagesGrade Mixing Analysis in Steelmaking Tundishusing Different Turbulence ModelsrakukulappullyNo ratings yet
- CPK GW Modelling-1Document1 pageCPK GW Modelling-1JUDO MUNDNo ratings yet
- Fully Coupled Six-Dimensional Calculations of The Water Dimer Vibration-Rotation-Tunneling States With A Split Wigner Pseudo Spectral ApproachDocument18 pagesFully Coupled Six-Dimensional Calculations of The Water Dimer Vibration-Rotation-Tunneling States With A Split Wigner Pseudo Spectral ApproachMddl2aNo ratings yet
- Investigación NavierDocument10 pagesInvestigación NavierIVONNE PATRICIA YANA ENRIQUEZNo ratings yet
- B 10 PDFDocument10 pagesB 10 PDFbessem berzigNo ratings yet
- Finite Difference Method of Modelling Groundwater FlowDocument7 pagesFinite Difference Method of Modelling Groundwater FlowVenegasNo ratings yet
- Water 13 03102 v2Document15 pagesWater 13 03102 v2Philip Cedamon CepedaNo ratings yet
- On The Applicability of The Uniquac Method To Ternary Liquid - Liquid EquilibriaDocument10 pagesOn The Applicability of The Uniquac Method To Ternary Liquid - Liquid EquilibriaHero19No ratings yet
- Resources 08 00156Document18 pagesResources 08 00156BrunoNo ratings yet
- Ijwrae 1 (3) 210-218Document9 pagesIjwrae 1 (3) 210-218Ayalew MohammedNo ratings yet
- AdeyeriDocument15 pagesAdeyerijme250047No ratings yet
- Comment On Advances in Ungauged Streamflow Prediction Using ArtificialDocument2 pagesComment On Advances in Ungauged Streamflow Prediction Using Artificialandrey16_2005No ratings yet
- Energies: An Efficient Drift-Flux Closure Relationship To Estimate Liquid Holdups of Gas-Liquid Two-Phase Flow in PipesDocument13 pagesEnergies: An Efficient Drift-Flux Closure Relationship To Estimate Liquid Holdups of Gas-Liquid Two-Phase Flow in PipesAnre Thanh HungNo ratings yet
- Alahmad 2010 - Prediction of Performance of Seawater RO UnitsDocument7 pagesAlahmad 2010 - Prediction of Performance of Seawater RO UnitsDánisa Urrutia ContrerasNo ratings yet
- Voskov2017 (OBL Isotermico. Add No Referencial Teorico)Document30 pagesVoskov2017 (OBL Isotermico. Add No Referencial Teorico)Igor LacerdaNo ratings yet
- Study On Threshold Selection Methods in CalculatioDocument13 pagesStudy On Threshold Selection Methods in CalculatioSarah AnindiyaNo ratings yet
- Ratio and Proportion: NtroductionDocument13 pagesRatio and Proportion: NtroductionlapogunevasNo ratings yet
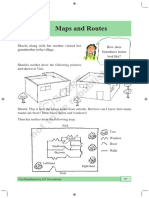
- Maps and Routes 9: BathroomDocument5 pagesMaps and Routes 9: BathroomlapogunevasNo ratings yet
- PCI Track Rollers 2015R2 PTRYDocument6 pagesPCI Track Rollers 2015R2 PTRYlapogunevasNo ratings yet
- PRB0580 0002 en - Fbe RTGDocument6 pagesPRB0580 0002 en - Fbe RTGlapogunevasNo ratings yet
- Ellab NewDocument32 pagesEllab NewlapogunevasNo ratings yet
- Language of Design: Critique FrameworkDocument1 pageLanguage of Design: Critique FrameworklapogunevasNo ratings yet
- Young CaregiversDocument66 pagesYoung CaregiverslapogunevasNo ratings yet
- Frequency Mixer: Level 7 (Lo Power +7 DBM) 0.5 To 500 MHZDocument2 pagesFrequency Mixer: Level 7 (Lo Power +7 DBM) 0.5 To 500 MHZlapogunevasNo ratings yet
- Johns Hopkins Fact BookDocument36 pagesJohns Hopkins Fact BooklapogunevasNo ratings yet
- 2002 5 206 209 PDFDocument4 pages2002 5 206 209 PDFlapogunevasNo ratings yet
- Claw Machine: Important InformationDocument2 pagesClaw Machine: Important InformationlapogunevasNo ratings yet
- Frequency Mixer: HJK-20VH+Document2 pagesFrequency Mixer: HJK-20VH+lapogunevasNo ratings yet
- PLK-B Technical Manual USADocument65 pagesPLK-B Technical Manual USAlapogunevasNo ratings yet
- Sustainability 10 02579Document17 pagesSustainability 10 02579lapogunevasNo ratings yet
- Chapter 9 JournalDocument2 pagesChapter 9 JournallapogunevasNo ratings yet
- X2 B32921 928Document27 pagesX2 B32921 928lapogunevasNo ratings yet
- Features: Reloc Wiring SolutionsDocument2 pagesFeatures: Reloc Wiring SolutionslapogunevasNo ratings yet
- Product Catalog - Enclosures - Polyester Enclosures - Klippon POK Series - POK 51 - 160 X 160 X 90 MMDocument2 pagesProduct Catalog - Enclosures - Polyester Enclosures - Klippon POK Series - POK 51 - 160 X 160 X 90 MMlapogunevasNo ratings yet
- SML SliDocument192 pagesSML SlilapogunevasNo ratings yet
- 311 - Java Certification PDFDocument49 pages311 - Java Certification PDFlapogunevasNo ratings yet
- 10groovy NotebookDocument190 pages10groovy NotebooklapogunevasNo ratings yet
- MCAEthical HackingreportDocument10 pagesMCAEthical HackingreportMEHUL PATELNo ratings yet
- The Memory System: Fundamental ConceptsDocument115 pagesThe Memory System: Fundamental ConceptsRajdeep ChatterjeeNo ratings yet
- Exact Globe Next Getting Started. User Guide PDFDocument118 pagesExact Globe Next Getting Started. User Guide PDFadi_sk0% (1)
- Online Store Locator Using PHP, MySQL and Google Maps APIDocument4 pagesOnline Store Locator Using PHP, MySQL and Google Maps APIAureliano DuarteNo ratings yet
- FuelX Autotune RE INT CGTDocument35 pagesFuelX Autotune RE INT CGTGurdeep SinghNo ratings yet
- Szabist: Final Project ReportDocument6 pagesSzabist: Final Project ReportTalha HashmiNo ratings yet
- Installed SoftwareDocument2 pagesInstalled SoftwareGoatNo ratings yet
- IoT Lecture 1 SlidesDocument19 pagesIoT Lecture 1 SlidesARNAV JAINNo ratings yet
- Fundamentals of Image Data Mining Analysis, Features, Classification and Retrieval by Dengsheng ZhangDocument382 pagesFundamentals of Image Data Mining Analysis, Features, Classification and Retrieval by Dengsheng ZhangLê Hồng LamNo ratings yet
- Sports Management SystemDocument4 pagesSports Management SystemM.Basit RahimNo ratings yet
- Stakeholder RequestDocument7 pagesStakeholder RequestVincentiuz RobertoNo ratings yet
- Suggested Solution To Written Exam Introduction To Linear and Integer Programming (DM515)Document18 pagesSuggested Solution To Written Exam Introduction To Linear and Integer Programming (DM515)Abdesselem BoulkrouneNo ratings yet
- Requirements: For OMICRON Test Universe 3.20Document5 pagesRequirements: For OMICRON Test Universe 3.20Khalfan AlhashmiNo ratings yet
- Social Media and Me ActivityDocument1 pageSocial Media and Me ActivityMatthew J. Kushin, Ph.D.No ratings yet
- Identifying Duplicate Copy On Other WebsitesDocument2 pagesIdentifying Duplicate Copy On Other WebsitesVino E GRGSMSNo ratings yet
- Week 1 Assignment SolutionDocument7 pagesWeek 1 Assignment SolutionR Chandrasekhar100% (1)
- Architecture of (Vxworks) : Labview ProgramsDocument14 pagesArchitecture of (Vxworks) : Labview ProgramsRangaRaj100% (1)
- KSH13007 KSH13007: SEMIHOW REV.A1, Oct 2007Document6 pagesKSH13007 KSH13007: SEMIHOW REV.A1, Oct 2007Manolo DoperNo ratings yet
- Sap Bi T - CodeDocument15 pagesSap Bi T - CodeRahulrahul88No ratings yet
- Working of InternetDocument4 pagesWorking of InternetYogesh Bansal100% (1)
- Course Information Sheet CIS-ITC (Theory) - FALL2022Document6 pagesCourse Information Sheet CIS-ITC (Theory) - FALL2022bilawal khanNo ratings yet
- Brochure - SYSTIMAX Structured Cabling SystemsDocument9 pagesBrochure - SYSTIMAX Structured Cabling Systemsnasnsq.ps4No ratings yet
- FB Post Details Courses 1Document2 pagesFB Post Details Courses 1muhammadshakeel348No ratings yet
- Basic Electronics Lab Manual For BSCDocument15 pagesBasic Electronics Lab Manual For BSCGanesan KandasamyNo ratings yet
- OMRON PLC-Based Process Control Engineering GuideDocument228 pagesOMRON PLC-Based Process Control Engineering GuideMichael Parohinog GregasNo ratings yet
- Nokia Technology Strategy: Backgrounder June 2007Document4 pagesNokia Technology Strategy: Backgrounder June 2007srvbaksiNo ratings yet
- Cleaning Company WebsiteDocument6 pagesCleaning Company Websitegwagsiglen0% (1)
- Siscaso Technical Task 01 2023Document1 pageSiscaso Technical Task 01 2023shashiNo ratings yet
- Evolution of Mobile Data CommunicationDocument4 pagesEvolution of Mobile Data CommunicationDulce DeNo ratings yet
- Group 500 User - GuideDocument116 pagesGroup 500 User - GuideDjordje JelisavacNo ratings yet
- Dark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseFrom EverandDark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseRating: 3.5 out of 5 stars3.5/5 (69)
- Alex & Me: How a Scientist and a Parrot Discovered a Hidden World of Animal Intelligence—and Formed a Deep Bond in the ProcessFrom EverandAlex & Me: How a Scientist and a Parrot Discovered a Hidden World of Animal Intelligence—and Formed a Deep Bond in the ProcessNo ratings yet
- Fire Season: Field Notes from a Wilderness LookoutFrom EverandFire Season: Field Notes from a Wilderness LookoutRating: 4 out of 5 stars4/5 (142)
- The Ancestor's Tale: A Pilgrimage to the Dawn of EvolutionFrom EverandThe Ancestor's Tale: A Pilgrimage to the Dawn of EvolutionRating: 4 out of 5 stars4/5 (812)
- Come Back, Como: Winning the Heart of a Reluctant DogFrom EverandCome Back, Como: Winning the Heart of a Reluctant DogRating: 3.5 out of 5 stars3.5/5 (10)
- The Light Eaters: How the Unseen World of Plant Intelligence Offers a New Understanding of Life on EarthFrom EverandThe Light Eaters: How the Unseen World of Plant Intelligence Offers a New Understanding of Life on EarthNo ratings yet
- When You Find Out the World Is Against You: And Other Funny Memories About Awful MomentsFrom EverandWhen You Find Out the World Is Against You: And Other Funny Memories About Awful MomentsRating: 3.5 out of 5 stars3.5/5 (13)
- Spoiled Rotten America: Outrages of Everyday LifeFrom EverandSpoiled Rotten America: Outrages of Everyday LifeRating: 3 out of 5 stars3/5 (19)
- The Revolutionary Genius of Plants: A New Understanding of Plant Intelligence and BehaviorFrom EverandThe Revolutionary Genius of Plants: A New Understanding of Plant Intelligence and BehaviorRating: 4.5 out of 5 stars4.5/5 (139)
- The Hummingbirds' Gift: Wonder, Beauty, and Renewal on WingsFrom EverandThe Hummingbirds' Gift: Wonder, Beauty, and Renewal on WingsRating: 4.5 out of 5 stars4.5/5 (63)
- When the Sahara Was Green: How Our Greatest Desert Came to BeFrom EverandWhen the Sahara Was Green: How Our Greatest Desert Came to BeRating: 4.5 out of 5 stars4.5/5 (6)
- The Rise and Fall of the Dinosaurs: A New History of a Lost WorldFrom EverandThe Rise and Fall of the Dinosaurs: A New History of a Lost WorldRating: 4 out of 5 stars4/5 (598)
- Why Fish Don't Exist: A Story of Loss, Love, and the Hidden Order of LifeFrom EverandWhy Fish Don't Exist: A Story of Loss, Love, and the Hidden Order of LifeRating: 4.5 out of 5 stars4.5/5 (700)
- The Other End of the Leash: Why We Do What We Do Around DogsFrom EverandThe Other End of the Leash: Why We Do What We Do Around DogsRating: 5 out of 5 stars5/5 (65)
- The Mind of Plants: Narratives of Vegetal IntelligenceFrom EverandThe Mind of Plants: Narratives of Vegetal IntelligenceRating: 4.5 out of 5 stars4.5/5 (12)
- Roxane Gay & Everand Originals: My Year of Psychedelics: Lessons on Better LivingFrom EverandRoxane Gay & Everand Originals: My Year of Psychedelics: Lessons on Better LivingRating: 5 out of 5 stars5/5 (5)
- The Soul of an Octopus: A Surprising Exploration into the Wonder of ConsciousnessFrom EverandThe Soul of an Octopus: A Surprising Exploration into the Wonder of ConsciousnessRating: 4.5 out of 5 stars4.5/5 (254)
- World of Wonders: In Praise of Fireflies, Whale Sharks, and Other AstonishmentsFrom EverandWorld of Wonders: In Praise of Fireflies, Whale Sharks, and Other AstonishmentsRating: 4 out of 5 stars4/5 (223)
- Roxane Gay & Everand Originals: My Year of Psychedelics: Lessons on Better LivingFrom EverandRoxane Gay & Everand Originals: My Year of Psychedelics: Lessons on Better LivingRating: 3.5 out of 5 stars3.5/5 (36)