You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Ee6703 Special Electrical MachinesDocument1 pageEe6703 Special Electrical MachinesAngelNo ratings yet
- Laboratory 3 Digital Filter DesignDocument8 pagesLaboratory 3 Digital Filter DesignModitha LakshanNo ratings yet
- Svcet: Srividya Colllege of Engg & Tech, Virudhunagar COURSE MATERIAL UNIT 4Document39 pagesSvcet: Srividya Colllege of Engg & Tech, Virudhunagar COURSE MATERIAL UNIT 4AngelNo ratings yet
- Application and Registration Form For Faculty CAREERS 2021-2022Document3 pagesApplication and Registration Form For Faculty CAREERS 2021-2022AngelNo ratings yet
- Svcet: Ee6501 Power System Analysis Page 1Document38 pagesSvcet: Ee6501 Power System Analysis Page 1AngelNo ratings yet
- Model For Ps5002-PsrDocument1 pageModel For Ps5002-PsrAngelNo ratings yet
- TQM Unit-2 PrinciplesDocument132 pagesTQM Unit-2 PrinciplesAngelNo ratings yet
- Certificate: All India Council For Technical EducationDocument1 pageCertificate: All India Council For Technical EducationAngelNo ratings yet
- G Besliya Angel: (An Autonomous Institution)Document1 pageG Besliya Angel: (An Autonomous Institution)AngelNo ratings yet
- Certificate of G BESLIYA ANGELDocument1 pageCertificate of G BESLIYA ANGELAngelNo ratings yet
- Ep Lab Manual For Eee&EceDocument46 pagesEp Lab Manual For Eee&EceAngelNo ratings yet
- (28 June - 2 July 2021) (28 June - 2 July 2021) : Registration FormDocument2 pages(28 June - 2 July 2021) (28 June - 2 July 2021) : Registration FormAngelNo ratings yet
- DC Lab 1Document6 pagesDC Lab 1AngelNo ratings yet
- Quantum Computational Complexity: John WatrousDocument44 pagesQuantum Computational Complexity: John WatrousArshidNo ratings yet
- Small Stability SMIB ExampleDocument8 pagesSmall Stability SMIB ExampleJaol1976No ratings yet
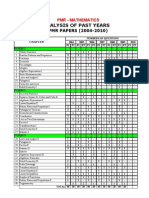
- Analysis of Past Year Questions - Maths PMRDocument1 pageAnalysis of Past Year Questions - Maths PMRPatrick ChinNo ratings yet
- Ordinary PDFDocument170 pagesOrdinary PDFAbhiyanshu ChoudharyNo ratings yet
- Basic Calculus: Antiderivatives of Exponential & Logarithmic FunctionsDocument9 pagesBasic Calculus: Antiderivatives of Exponential & Logarithmic FunctionsLancy CidroNo ratings yet
- B1 Group3Document13 pagesB1 Group3Kausar ParvejNo ratings yet
- DLL Week 5Document3 pagesDLL Week 5Jela Marie Carpizo EscuderoNo ratings yet
- Math ReviewerrrrrrrDocument5 pagesMath ReviewerrrrrrrMariel GregoreNo ratings yet
- Math 8 - FactoringDocument26 pagesMath 8 - FactoringPaul John Mariano AgcaoiliNo ratings yet
- NGEC 4 Final ExamDocument3 pagesNGEC 4 Final ExamJustiniano SalicioNo ratings yet
- Module 4Document29 pagesModule 4Michelle Jane SevillaNo ratings yet
- SlidesL5 PDFDocument12 pagesSlidesL5 PDFarani ahmad ridhaNo ratings yet
- Vectors in Three DimensionDocument18 pagesVectors in Three DimensionCephasNo ratings yet
- CH 08Document48 pagesCH 08KavunNo ratings yet
- Module 5 - Rational Functions Equations and InequalitiesDocument32 pagesModule 5 - Rational Functions Equations and InequalitiesSuzuri L100% (1)
- Markov Chains: Lecture 2Document4 pagesMarkov Chains: Lecture 2shahilshah1919No ratings yet
- Triangulated Irregular NetworkDocument9 pagesTriangulated Irregular NetworkRizal FirmansyahNo ratings yet
- Cantor, Georg - RNJDocument4 pagesCantor, Georg - RNJrufino aparisNo ratings yet
- Canonical Correlation NotesDocument6 pagesCanonical Correlation Notesamul65No ratings yet
- Dilr 10Document102 pagesDilr 10gargi pimplaskarNo ratings yet
- Approximation of FIR by IIR Digital FiltersDocument11 pagesApproximation of FIR by IIR Digital FiltersKirti Deo MishraNo ratings yet
- RSA AlgorithmDocument22 pagesRSA AlgorithmmathpalsonuNo ratings yet
- Binomial Expansions (Notes & Exercises)Document4 pagesBinomial Expansions (Notes & Exercises)Josh, LRTNo ratings yet
- 2012 03 PHD Davoudi PDFDocument142 pages2012 03 PHD Davoudi PDFاغريسةNo ratings yet
- Number SystemDocument14 pagesNumber SystemrakeshmachhiNo ratings yet
- 12-02 Chap GereDocument18 pages12-02 Chap GereMuhammad Abdul Wajid RaiNo ratings yet
- Oral Recit FormulaDocument1 pageOral Recit FormulaReyna Mae MarangaNo ratings yet
- Introduction To Set Theory and Subsets and Set OperationsDocument11 pagesIntroduction To Set Theory and Subsets and Set OperationsNeville Faith MiculobNo ratings yet
- 7.1 Define and Use Sequences SeriesDocument33 pages7.1 Define and Use Sequences SeriesSarthak JoshiNo ratings yet