You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- 220 1002 Exam ObjectivesDocument19 pages220 1002 Exam Objectivesapi-272637257100% (1)
- Disk and FLARE OE Matrix: EMC AX4-5 Series Storage SystemsDocument6 pagesDisk and FLARE OE Matrix: EMC AX4-5 Series Storage SystemsValentina KapustinskaNo ratings yet
- An 1382 - 6 Low Voltage Differential Signaling LVDS by AgilentDocument20 pagesAn 1382 - 6 Low Voltage Differential Signaling LVDS by AgilentJose Gonzalez100% (1)
- Ayesha Ict AssignmentDocument2 pagesAyesha Ict AssignmentAhmar JabbarNo ratings yet
- VMware TCO Comparison CalculatorDocument9 pagesVMware TCO Comparison CalculatorSNo ratings yet
- DS-KH6210-L Video Intercom Indoor Station With 7-Inch ScreenDocument3 pagesDS-KH6210-L Video Intercom Indoor Station With 7-Inch ScreenGrosu HoriaNo ratings yet
- HP Storeonce 2700, 2900, 4500 and 4700 Backup System: Installation and Configuration GuideDocument130 pagesHP Storeonce 2700, 2900, 4500 and 4700 Backup System: Installation and Configuration GuideMikel RichieNo ratings yet
- Telco BridgeDocument1 pageTelco BridgeMuntashir IslamNo ratings yet
- 03 - RN28193EN20GLA0 - Flexi BSC Architecture and InterfaceDocument45 pages03 - RN28193EN20GLA0 - Flexi BSC Architecture and InterfaceMahdiy Bary100% (1)
- Airbag Sensor Circuit DiagramDocument6 pagesAirbag Sensor Circuit DiagramSungkur NishanNo ratings yet
- Inf DesktopDocument82 pagesInf DesktopAnderssen ViannaNo ratings yet
- Instrumentation KalsiDocument14 pagesInstrumentation KalsibavariankingNo ratings yet
- Study and Analysis of RTL Verification Tool IEEE ConferenceDocument7 pagesStudy and Analysis of RTL Verification Tool IEEE ConferenceZC LNo ratings yet
- AC I DC ChokeDocument4 pagesAC I DC ChokeNedel LabileNo ratings yet
- 0542 (MDM) HubJavaUserExits en H2LDocument18 pages0542 (MDM) HubJavaUserExits en H2LarjuncchaudharyNo ratings yet
- Vijay Dhanakodi-Mulesoft DeveloperDocument3 pagesVijay Dhanakodi-Mulesoft DeveloperTamilarasi DhanakodiNo ratings yet
- TEX700LCD-1000light 0310Document4 pagesTEX700LCD-1000light 0310evert22No ratings yet
- Cutler Hammer Power Command 2Document32 pagesCutler Hammer Power Command 2Nestor San AgustinNo ratings yet
- HP ENVY M6 k010dx Sleekbook Vpu11 LA-9851PDocument47 pagesHP ENVY M6 k010dx Sleekbook Vpu11 LA-9851PMichael VolaNo ratings yet
- NucleiDocument7 pagesNucleiSaransh SumanNo ratings yet
- ARM Cortex Portfolio 2114Document5 pagesARM Cortex Portfolio 2114Raja NaiduNo ratings yet
- Project - Report - Rajni (200002065)Document32 pagesProject - Report - Rajni (200002065)Rajni SavaliyaNo ratings yet
- Conditionals and Loops - Beginning Python Programming For Aspiring Web DevelopersDocument16 pagesConditionals and Loops - Beginning Python Programming For Aspiring Web DevelopersJames LiuNo ratings yet
- Memahami Prinsip Kerja Memori Statis (SRAM) dan Dinamis (DRAMDocument11 pagesMemahami Prinsip Kerja Memori Statis (SRAM) dan Dinamis (DRAMVincent Terra NovaNo ratings yet
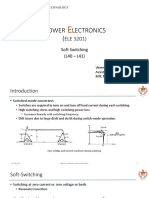
- Ower Lectronics (: Soft Switching (L40 - L41)Document7 pagesOwer Lectronics (: Soft Switching (L40 - L41)Mayank KashyapNo ratings yet
- Network Troubleshooting StepsDocument5 pagesNetwork Troubleshooting StepsKayNo ratings yet
- G60a Best Practices For Business Analyst Appendix A v1 0Document29 pagesG60a Best Practices For Business Analyst Appendix A v1 0Hanh ChuNo ratings yet
- Administrator Guide for Ceph Storage Cluster ManagementDocument89 pagesAdministrator Guide for Ceph Storage Cluster ManagementVendas Top100% (1)
- Compal Confidential: EA50 - HW M/B Schematics DocumentDocument51 pagesCompal Confidential: EA50 - HW M/B Schematics DocumentАнтон ФедоровNo ratings yet
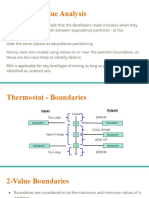
- Boundary Value AnalysisDocument9 pagesBoundary Value AnalysisChristien Froi FelicianoNo ratings yet