You might also like
- Schematic Pq3-Ver1.2 Furman-Pq3-Verde 20190311230653Document1 pageSchematic Pq3-Ver1.2 Furman-Pq3-Verde 20190311230653Marco Martino40% (5)
- GND Low-In: Elder Audio ManufactoryDocument1 pageGND Low-In: Elder Audio ManufactoryMauricio Pérez VeraNo ratings yet
- 2kw Power Amplifier PDFDocument1 page2kw Power Amplifier PDFYuda Aditama100% (1)
- Schematic DiagramDocument1 pageSchematic Diagrambakadesu senpaitachiNo ratings yet
- Práctica Semana 3Document1 pagePráctica Semana 3Andrey Vargas MoralesNo ratings yet
- 2d-Sketch Ver01Document1 page2d-Sketch Ver01Thành TrầnNo ratings yet
- AMIS60 Power AmpDocument1 pageAMIS60 Power AmparcocerNo ratings yet
- Modelos AntigosDocument9 pagesModelos AntigosGabriel de LimaNo ratings yet
- 3WayCrossover SimpleDocument1 page3WayCrossover SimpleSegaNo ratings yet
- 25 A Power SupplyDocument1 page25 A Power Supplyshefu74No ratings yet
- Schematics Led ControlDocument1 pageSchematics Led Controlkbartl100% (1)
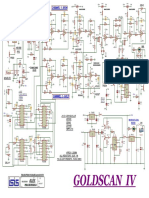
- Goldscan 4 by Eric Foster PDFDocument5 pagesGoldscan 4 by Eric Foster PDFAgus RhamdaniNo ratings yet
- Trinity 18watt TMB Schematic v12Document1 pageTrinity 18watt TMB Schematic v12Fabio LimaNo ratings yet
- Neod2K Ultimate V.1: - C:/Users/Minipc/Desktop/Class D/D2Kneo/D2Kneo Ultimate V.1.AscDocument2 pagesNeod2K Ultimate V.1: - C:/Users/Minipc/Desktop/Class D/D2Kneo/D2Kneo Ultimate V.1.AscDanang PrasetiyoNo ratings yet
- T5L典型应用原理图(2022 01 06)Document1 pageT5L典型应用原理图(2022 01 06)ice.hanbingNo ratings yet
- Pmodstep SCHDocument1 pagePmodstep SCHswati sakhareNo ratings yet
- Esquema Eletronico Ups East Bivolt - 600 - 1200va-Parte2Document1 pageEsquema Eletronico Ups East Bivolt - 600 - 1200va-Parte2Armandinho CaveroNo ratings yet
- Arduino Nano: Interactive Traffic Lights Led Chase EffectDocument1 pageArduino Nano: Interactive Traffic Lights Led Chase EffectEdel Karlo Sibidal ZarasateNo ratings yet
- DC12V Ac127v 400WDocument1 pageDC12V Ac127v 400WWalles PereiraNo ratings yet
- Hour Minute SEC: 24HR Digital Clock - PDSPRJDocument1 pageHour Minute SEC: 24HR Digital Clock - PDSPRJTaufiqulhadiNo ratings yet
- Trinity 18watt Plexi MK - II Schematic v4Document1 pageTrinity 18watt Plexi MK - II Schematic v4Gregoria Cortes GarciaNo ratings yet
- 2kw Power Amplifier PDFDocument1 page2kw Power Amplifier PDFYuda Aditama100% (1)
- 2kw Power Amplifier PDFDocument1 page2kw Power Amplifier PDFYuda AditamaNo ratings yet
- Service Information Service Information: LaneyDocument5 pagesService Information Service Information: LaneyGladson GoesNo ratings yet
- DDA Cs8-SchematicsDocument25 pagesDDA Cs8-SchematicsLEANDRO PINHEIRO PIUPIUNo ratings yet
- UniPro - Discrete Class D v.1Document1 pageUniPro - Discrete Class D v.1AnuNo ratings yet
- King Tone Duellist - SchematicDocument1 pageKing Tone Duellist - SchematicDavid BrownNo ratings yet
- D2KFB - Fullbridge V.2Document1 pageD2KFB - Fullbridge V.2Gianmarco ScarabelloNo ratings yet
- D2KFB - Fullbridge v.2Document1 pageD2KFB - Fullbridge v.2Đoàn Minh CươngNo ratings yet
- D2KFB - Fullbridge V.2Document1 pageD2KFB - Fullbridge V.2Đoàn Minh CươngNo ratings yet
- D2KFB - Fullbridge v.2Document1 pageD2KFB - Fullbridge v.2BerbieNo ratings yet
- D2KFB - Fullbridge V.2Document1 pageD2KFB - Fullbridge V.2Zamfir VanguNo ratings yet
- D2KFB - Fullbridge V.2Document1 pageD2KFB - Fullbridge V.2esfri-arNo ratings yet
- D2KFB - Fullbridge v.2Document1 pageD2KFB - Fullbridge v.2amdono vitonNo ratings yet
- 150 515Document1 page150 515Zeljko TomicNo ratings yet
- Amplifier AllDocument1 pageAmplifier AllMushonif MarsholiNo ratings yet
- Osc-V 2 3-SchematicDocument1 pageOsc-V 2 3-SchematicMosta GartusNo ratings yet
- Hitachi VAS EF3 BottopDocument3 pagesHitachi VAS EF3 Bottopendank baniNo ratings yet
- Carvin 8 Bus MASTERDocument1 pageCarvin 8 Bus MASTERRobby AhyanaNo ratings yet
- 9 Practice ModelsDocument9 pages9 Practice ModelsSanjay PSNo ratings yet
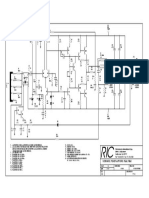
- Ric RG90 y RG60Document1 pageRic RG90 y RG60GabrielConsentidoNo ratings yet
- LVL - Lok-500 v1.13 SchematicDocument1 pageLVL - Lok-500 v1.13 SchematiccrackintheshatNo ratings yet
- PS800ServiceManual PDFDocument35 pagesPS800ServiceManual PDFbruce hu100% (1)
- Gsynth 1Document1 pageGsynth 1subcomandantemarcosNo ratings yet
- FT1 FILTER SCHEMATIC v.2.2 2021Document1 pageFT1 FILTER SCHEMATIC v.2.2 2021MrNiceNo ratings yet
- Carvin Schematic - DCM4000 Iinput and Preamp Rev BDocument1 pageCarvin Schematic - DCM4000 Iinput and Preamp Rev BdodNo ratings yet
- D2KFBNeo - Fullbridge V.6 Full SchemeDocument1 pageD2KFBNeo - Fullbridge V.6 Full Schemesakura 835No ratings yet
- Installation Instructions For BVT-250 and BVR-250: Introduction To The Series 250Document3 pagesInstallation Instructions For BVT-250 and BVR-250: Introduction To The Series 250pawa100% (1)
- D2KFB - Fullbridge V.2aDocument1 pageD2KFB - Fullbridge V.2aDedik Velozs100% (1)
- ClassD-Fullbridge V.2a PDFDocument1 pageClassD-Fullbridge V.2a PDFSahab RathoreNo ratings yet
- D2KFB - Fullbridge V.2a PDFDocument1 pageD2KFB - Fullbridge V.2a PDFSahab Rathore100% (2)
- C26 47nF/50V: Tc1010 Bloq A CobrarDocument1 pageC26 47nF/50V: Tc1010 Bloq A CobrarOsvaldo SantosNo ratings yet
- Sch-Versatil 1001 V2.2Document1 pageSch-Versatil 1001 V2.2Carlos FiuzaNo ratings yet
- G2.1u Service ManualDocument2 pagesG2.1u Service ManualAntonio Fernandes100% (1)
- Carvin Schematic - DCM2000 REV. HDocument2 pagesCarvin Schematic - DCM2000 REV. Hdod100% (2)
- 2 Way Crossover 24 DB-octaveDocument1 page2 Way Crossover 24 DB-octaveMamad SoheeNo ratings yet
- 1990s Orange Hustler ComboDocument1 page1990s Orange Hustler ComboGladson GoesNo ratings yet
- Rear Housing: Bina Nusantara Skills Competiton - 2017Document1 pageRear Housing: Bina Nusantara Skills Competiton - 2017gundhiufsNo ratings yet
- Antonio Plate 5Document1 pageAntonio Plate 5Mark Adrian TagabanNo ratings yet
- Fill Your Glass With Gold-When It's Half-Full or Even Completely ShatteredFrom EverandFill Your Glass With Gold-When It's Half-Full or Even Completely ShatteredNo ratings yet
- Technical Description: Fastrax UP500 GPS ReceiverDocument15 pagesTechnical Description: Fastrax UP500 GPS ReceiverAnkur KunduNo ratings yet
- EB468 PC Interface Bundle ManualDocument12 pagesEB468 PC Interface Bundle ManualAnkur KunduNo ratings yet
- Elektor Proton Robot: A Versatile Platform For Learning and ExperimentingDocument3 pagesElektor Proton Robot: A Versatile Platform For Learning and ExperimentingAnkur KunduNo ratings yet
- EB414 Mobile Phone Bundle ManualDocument12 pagesEB414 Mobile Phone Bundle ManualAnkur KunduNo ratings yet
- EB421 Easy Zigbee Bundle ManualDocument12 pagesEB421 Easy Zigbee Bundle ManualAnkur KunduNo ratings yet
- EB118 Mobile Phone Training SolutionDocument2 pagesEB118 Mobile Phone Training SolutionAnkur KunduNo ratings yet
- Trblu23: Bluetooth Intelligent Serial ModuleDocument2 pagesTrblu23: Bluetooth Intelligent Serial ModuleAnkur KunduNo ratings yet
- Xscopes: User'S ManualDocument44 pagesXscopes: User'S ManualAnkur KunduNo ratings yet
- Document Code: EB006-30-8Document15 pagesDocument Code: EB006-30-8Ankur KunduNo ratings yet
- Product Preview: Semiconductor Technical DataDocument20 pagesProduct Preview: Semiconductor Technical DataAnkur KunduNo ratings yet
- Bluetooth at Command SetDocument33 pagesBluetooth at Command SetAnkur KunduNo ratings yet
- Mobile Phone Solution: Course NotesDocument57 pagesMobile Phone Solution: Course NotesAnkur KunduNo ratings yet
- Vangold CCTV Camera Pricelist (CCD+CMOS) V13.9.21Document27 pagesVangold CCTV Camera Pricelist (CCD+CMOS) V13.9.21Ankur KunduNo ratings yet
- When A Snobbish Gangster Meets A Pervert CassanovaDocument62 pagesWhen A Snobbish Gangster Meets A Pervert CassanovaMaria Shiela Mae Baratas100% (1)
- NABARD R&D Seminar FormatDocument7 pagesNABARD R&D Seminar FormatAnupam G. RatheeNo ratings yet
- C4 Vectors - Vector Lines PDFDocument33 pagesC4 Vectors - Vector Lines PDFMohsin NaveedNo ratings yet
- LspciDocument4 pagesLspciregistroosNo ratings yet
- Open Letter To Hon. Nitin Gadkari On Pothole Problem On National and Other Highways in IndiaDocument3 pagesOpen Letter To Hon. Nitin Gadkari On Pothole Problem On National and Other Highways in IndiaProf. Prithvi Singh KandhalNo ratings yet
- Hydro Electric Fire HistoryDocument3 pagesHydro Electric Fire HistorygdmurfNo ratings yet
- Roxas City For Revision Research 7 Q1 MELC 23 Week2Document10 pagesRoxas City For Revision Research 7 Q1 MELC 23 Week2Rachele DolleteNo ratings yet
- To Study Customer Relationship Management in Big BazaarDocument45 pagesTo Study Customer Relationship Management in Big BazaarAbhi KengaleNo ratings yet
- Odisha State Museum-1Document26 pagesOdisha State Museum-1ajitkpatnaikNo ratings yet
- Sankranthi PDFDocument39 pagesSankranthi PDFMaruthiNo ratings yet
- MEd TG G07 EN 04-Oct Digital PDFDocument94 pagesMEd TG G07 EN 04-Oct Digital PDFMadhan GanesanNo ratings yet
- Advertising II Marathi VersionDocument91 pagesAdvertising II Marathi VersionHarsh Sangani100% (1)
- Faa Data On B 777 PDFDocument104 pagesFaa Data On B 777 PDFGurudutt PaiNo ratings yet
- Forex Day Trading SystemDocument17 pagesForex Day Trading SystemSocial Malik100% (1)
- 2-1. Drifting & Tunneling Drilling Tools PDFDocument9 pages2-1. Drifting & Tunneling Drilling Tools PDFSubhash KediaNo ratings yet
- Conservation Assignment 02Document16 pagesConservation Assignment 02RAJU VENKATANo ratings yet
- Bad Memories Walkthrough 0.52Document10 pagesBad Memories Walkthrough 0.52Micael AkumaNo ratings yet
- Kapinga Kamwalye Conservancy ReleaseDocument5 pagesKapinga Kamwalye Conservancy ReleaseRob ParkerNo ratings yet
- Module 1 Lesson 2Document31 pagesModule 1 Lesson 2Angela Rose BanastasNo ratings yet
- Bacacay South Hris1Document7,327 pagesBacacay South Hris1Lito ObstaculoNo ratings yet
- HFE0106 TraskPart2Document5 pagesHFE0106 TraskPart2arunkr1No ratings yet
- IcarosDesktop ManualDocument151 pagesIcarosDesktop ManualAsztal TavoliNo ratings yet
- Wwii TictactoeDocument2 pagesWwii Tictactoeapi-557780348No ratings yet
- I I Formularies Laundry Commercial Liquid Detergents 110-12-020 USDocument6 pagesI I Formularies Laundry Commercial Liquid Detergents 110-12-020 USfaissalNo ratings yet
- T5 B11 Victor Manuel Lopez-Flores FDR - FBI 302s Re VA ID Cards For Hanjour and Almihdhar 195Document11 pagesT5 B11 Victor Manuel Lopez-Flores FDR - FBI 302s Re VA ID Cards For Hanjour and Almihdhar 1959/11 Document Archive100% (2)
- Electronic Spin Inversion: A Danger To Your HealthDocument4 pagesElectronic Spin Inversion: A Danger To Your Healthambertje12No ratings yet
- Lesson Plan For Implementing NETSDocument5 pagesLesson Plan For Implementing NETSLisa PizzutoNo ratings yet
- Gaming Ports MikrotikDocument6 pagesGaming Ports MikrotikRay OhmsNo ratings yet
- 2016 IT - Sheilding Guide PDFDocument40 pages2016 IT - Sheilding Guide PDFlazarosNo ratings yet
- Basic Econometrics Questions and AnswersDocument3 pagesBasic Econometrics Questions and AnswersRutendo TarabukuNo ratings yet