You might also like
- Cinematography - Theory and Practice, 4th EditionDocument528 pagesCinematography - Theory and Practice, 4th EditionFede Giardina93% (14)
- Test Bank For Film Art An Introduction 12th Edition David Bordwell Kristin Thompson Jeff SmithDocument20 pagesTest Bank For Film Art An Introduction 12th Edition David Bordwell Kristin Thompson Jeff SmithPenelope Campbell100% (28)
- AutoCAD .NET Developers GuideDocument541 pagesAutoCAD .NET Developers Guidetyke100% (13)
- CTS 2020eDocument4 pagesCTS 2020eFernandoi100% (1)
- FOCUS 40 Keystroke CommandsDocument30 pagesFOCUS 40 Keystroke Commandsn1kskeNo ratings yet
- Cyberpunk Red Core v1.25!1!100Document100 pagesCyberpunk Red Core v1.25!1!100Константин Алалыкин50% (2)
- Compact, Operator-Friendly Laser Scanner: Gls-1000 Specifi Cations Scanmaster Specifi Cations NsDocument4 pagesCompact, Operator-Friendly Laser Scanner: Gls-1000 Specifi Cations Scanmaster Specifi Cations NsHenry CruzNo ratings yet
- GLS 1000Document2 pagesGLS 1000Topcon Middle East100% (2)
- Leica PegasusStream DSDocument2 pagesLeica PegasusStream DSselleriverketNo ratings yet
- Dio1000 Sfe NdtasDocument2 pagesDio1000 Sfe Ndtashamyd dammouNo ratings yet
- Edan Acclarix AX3 Series DatasheetDocument22 pagesEdan Acclarix AX3 Series DatasheetCasique OldemarNo ratings yet
- Sony DXC 3000aDocument14 pagesSony DXC 3000aVegas ChannelNo ratings yet
- Artec Ray: Scan Up ToDocument4 pagesArtec Ray: Scan Up ToIvan HandjievNo ratings yet
- Acclarix AX3 Series Datasheet 1.0Document19 pagesAcclarix AX3 Series Datasheet 1.0mjidilaNo ratings yet
- SD9366-EH-v2: Speed Dome Network CameraDocument4 pagesSD9366-EH-v2: Speed Dome Network CameraJose Martin MotaNo ratings yet
- I-Fullwaver: Iris InstrumentsDocument2 pagesI-Fullwaver: Iris InstrumentsmaxNo ratings yet
- DH-IPC-HDB4431C-AS: 4MP Mini Dome Network CameraDocument3 pagesDH-IPC-HDB4431C-AS: 4MP Mini Dome Network CameraNøhá Akå NõåhNo ratings yet
- Shimadzu AA-7800 Series Full Spec SheetDocument2 pagesShimadzu AA-7800 Series Full Spec SheetT100% (1)
- Iz9361-Ehdatasheet en PDFDocument3 pagesIz9361-Ehdatasheet en PDFHercules Sofio SanchezNo ratings yet
- TRIO C8 Series CutsheetDocument2 pagesTRIO C8 Series Cutsheetcredondo1No ratings yet
- Hands-Free Dual-Laser Omnidirectional ScannerDocument1 pageHands-Free Dual-Laser Omnidirectional Scannershushanto1No ratings yet
- Spesifikasi Detail & Jual Total Station Topcon GTS-102N (081297551995)Document2 pagesSpesifikasi Detail & Jual Total Station Topcon GTS-102N (081297551995)Rina Wahyuni100% (1)
- GTS 102N PDFDocument2 pagesGTS 102N PDFSaepullohNo ratings yet
- Datasheet Optris PI LightWeightDocument2 pagesDatasheet Optris PI LightWeightCarlos CrisostomoNo ratings yet
- WIRIS Pro SC Data SheetDocument4 pagesWIRIS Pro SC Data Sheet熙槃No ratings yet
- Ib8369datasheet enDocument2 pagesIb8369datasheet enNavarro FerreiraNo ratings yet
- Cheetah: Cmos 12 MPDocument2 pagesCheetah: Cmos 12 MPjuanjo_cvNo ratings yet
- Gecko Compact RuggedDocument2 pagesGecko Compact RuggedSupriyo PNo ratings yet
- BOSCHBMP280Document2 pagesBOSCHBMP280washingtonNo ratings yet
- L011375 - MT4434TE Spec SheetDocument2 pagesL011375 - MT4434TE Spec SheetJunior BautistaNo ratings yet
- Dio1000 Sfe NdtasDocument2 pagesDio1000 Sfe Ndtascarlos lopez hernandezNo ratings yet
- DH-IPC-HDBW1431E: 4MP WDR IR Mini-Dome Network CameraDocument3 pagesDH-IPC-HDBW1431E: 4MP WDR IR Mini-Dome Network CameraMusse NigussieNo ratings yet
- FLIR VUE Pro DatasheetDocument2 pagesFLIR VUE Pro DatasheetAlex MorfinNo ratings yet
- Fisa Tehnica Camera Supraveghere IP Dome Acvil ACV-IPDF30-4M 2.0 4 MP IR 30 M 2.8 MM PoEDocument3 pagesFisa Tehnica Camera Supraveghere IP Dome Acvil ACV-IPDF30-4M 2.0 4 MP IR 30 M 2.8 MM PoEAlbert FfNo ratings yet
- SNC-WR632: Outdoor Unitized1080/60p Rapid Dome Camera Powered by Ipela Engine Pro™Document2 pagesSNC-WR632: Outdoor Unitized1080/60p Rapid Dome Camera Powered by Ipela Engine Pro™Mohran HakimNo ratings yet
- DH Ipc HDBW5442R AseDocument3 pagesDH Ipc HDBW5442R Aseyassine saferNo ratings yet
- SPINEL3G Data Sheet 8.14.17smDocument4 pagesSPINEL3G Data Sheet 8.14.17smGary KohlerNo ratings yet
- Flexibility For Easy Research: Sales DepartmentDocument6 pagesFlexibility For Easy Research: Sales DepartmentamtcorporationNo ratings yet
- Miniature Form Factor (12x12 MM) Easy Integration Development Kit AvailableDocument1 pageMiniature Form Factor (12x12 MM) Easy Integration Development Kit Availabledany weinfeldNo ratings yet
- DH Ipc HFW2431TM ZSVFS PDFDocument3 pagesDH Ipc HFW2431TM ZSVFS PDFOmar EspejoNo ratings yet
- Electronic Total StationDocument2 pagesElectronic Total StationseshuNo ratings yet
- T T T T Terrasirch Errasirch Errasirch Errasirch Errasirch: Sir Sir Sir Sir Sir-3000 - 3000 - 3000 - 3000 - 3000Document2 pagesT T T T Terrasirch Errasirch Errasirch Errasirch Errasirch: Sir Sir Sir Sir Sir-3000 - 3000 - 3000 - 3000 - 3000vaibhavNo ratings yet
- SNC-VM602R: Outdoor IR Ruggedized 720/60p Camera Powered by IPELA ENGINE EX™Document2 pagesSNC-VM602R: Outdoor IR Ruggedized 720/60p Camera Powered by IPELA ENGINE EX™Mohran HakimNo ratings yet
- Sunblade 150Document2 pagesSunblade 150Resad HajdarevicNo ratings yet
- DH Ipc Hfw5431e Ze - BDocument3 pagesDH Ipc Hfw5431e Ze - BMuhammad Asif RazaNo ratings yet
- 1.SF125-S2 Datasheet 20210421 DE64Document3 pages1.SF125-S2 Datasheet 20210421 DE64SavejaveNo ratings yet
- Jet 32 Plus DR (Pd-153-E - Rev. 06)Document7 pagesJet 32 Plus DR (Pd-153-E - Rev. 06)Harold James BoyrasNo ratings yet
- GS M72C - enDocument2 pagesGS M72C - enGeneralscan .COMNo ratings yet
- E1/Datacom Tester XG2130: Basic FunctionsDocument2 pagesE1/Datacom Tester XG2130: Basic FunctionsAlexander CelisNo ratings yet
- CMXA70 GX Series Microlog Datasheet CM2311 Rev 08-06Document4 pagesCMXA70 GX Series Microlog Datasheet CM2311 Rev 08-06Marcos DiazNo ratings yet
- Octopus ISR Systems Epsilon 140LC DatasheetDocument2 pagesOctopus ISR Systems Epsilon 140LC DatasheetGOMPA TRIVENI 122010319022No ratings yet
- Camaras Termografica Flir A655sc para Aplicaciones de IdDocument2 pagesCamaras Termografica Flir A655sc para Aplicaciones de IdDavid Fernández RucobaNo ratings yet
- Apogee Alta F8300: Compact, 8.3 Megapixel CCD System FeaturesDocument5 pagesApogee Alta F8300: Compact, 8.3 Megapixel CCD System Featuresmolino26654No ratings yet
- Ipc Hdbw4231e As s4Document3 pagesIpc Hdbw4231e As s4EBIE ATANGANANo ratings yet
- Phasec 3 Eddy Current Flaw Detector: Phase Plane Display Using A Weldscan Probe Spot DisplayDocument2 pagesPhasec 3 Eddy Current Flaw Detector: Phase Plane Display Using A Weldscan Probe Spot DisplayPrasetya SiregarNo ratings yet
- EXTECH 407732A - Ficha TecnicaDocument2 pagesEXTECH 407732A - Ficha TecnicaJhoselin AranaNo ratings yet
- Datasheetumix U5Document2 pagesDatasheetumix U5AlexNo ratings yet
- DH IPC HDBW4231E AS - Datasheet - 20170329 PDFDocument3 pagesDH IPC HDBW4231E AS - Datasheet - 20170329 PDFJuan Manuel JorqueraNo ratings yet
- DH-IPC-HDBW1531E: 5MP WDR IR Mini-Dome Network CameraDocument3 pagesDH-IPC-HDBW1531E: 5MP WDR IR Mini-Dome Network CameraAmjad AliNo ratings yet
- DH Ipc Hdw4231em As Datasheet 201703291Document3 pagesDH Ipc Hdw4231em As Datasheet 201703291Jesus Molina YllaNo ratings yet
- DH-IPC-HDW2831T-ZS-S2: 8MP Lite IR Vari-Focal Eyeball Nework CameraDocument3 pagesDH-IPC-HDW2831T-ZS-S2: 8MP Lite IR Vari-Focal Eyeball Nework CameraMEL ANGELESNo ratings yet
- E800 Datasheet-V3.0-ENGDocument2 pagesE800 Datasheet-V3.0-ENGbaysaa0126No ratings yet
- V CT 2.2D: Eddy Current Automated Inspection InstrumentDocument2 pagesV CT 2.2D: Eddy Current Automated Inspection Instrumentyoi sigit70No ratings yet
- Basler Area Scan Cameras VGA to 5MP and Up to 210 FPSDocument6 pagesBasler Area Scan Cameras VGA to 5MP and Up to 210 FPSKUMA1999No ratings yet
- Signiant Big Files Big Challenges NMDocument9 pagesSigniant Big Files Big Challenges NMn1kskeNo ratings yet
- Inertial Explorer OM-20000106 Rev 10Document52 pagesInertial Explorer OM-20000106 Rev 10n1kskeNo ratings yet
- BIM and ISO 19650 From A Project Management PerspectiveDocument48 pagesBIM and ISO 19650 From A Project Management PerspectiveBrunoVianaNo ratings yet
- Leica CCP Brochure enDocument4 pagesLeica CCP Brochure enn1kskeNo ratings yet
- Theory Buried Pipe Manual V10 PDFDocument24 pagesTheory Buried Pipe Manual V10 PDFWan Syazwan100% (1)
- 2010 Braillebox V4: OwnerDocument8 pages2010 Braillebox V4: Ownern1kskeNo ratings yet
- Improve Data Quality With LabelingDocument16 pagesImprove Data Quality With LabelingAbdouNo ratings yet
- Braille Embosser Everest-D V4: OwnerDocument8 pagesBraille Embosser Everest-D V4: Ownern1kskeNo ratings yet
- Theory Buried Pipe Manual V10 PDFDocument24 pagesTheory Buried Pipe Manual V10 PDFWan Syazwan100% (1)
- Sunbelt Quick Guide - Stream C Positioning Data From TS16Document4 pagesSunbelt Quick Guide - Stream C Positioning Data From TS16n1kskeNo ratings yet
- Ground Penetrating Radar - Survey Design 1999Document22 pagesGround Penetrating Radar - Survey Design 1999Carlo RojasNo ratings yet
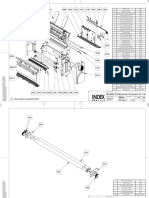
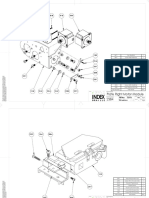
- Basic-D V5 Exploded-ViewDocument5 pagesBasic-D V5 Exploded-Viewn1kskeNo ratings yet
- 2000 Basic-D V4: OwnerDocument7 pages2000 Basic-D V4: Ownern1kskeNo ratings yet
- Sunbelt Quick Guide - Stream C GPS Connection Via BluetoothDocument7 pagesSunbelt Quick Guide - Stream C GPS Connection Via Bluetoothn1kskeNo ratings yet
- Leica Captivate GPS StreamCDocument6 pagesLeica Captivate GPS StreamCn1kskeNo ratings yet
- GS NMEA SettingsDocument1 pageGS NMEA Settingsn1kskeNo ratings yet
- Introduction To GPRDocument12 pagesIntroduction To GPRn1kskeNo ratings yet
- CAD/CAM Software, Plant Design, and 3D Modeling GuideDocument9 pagesCAD/CAM Software, Plant Design, and 3D Modeling GuideAmit GaikwadNo ratings yet
- Generic Data Mapper EnUS en-USDocument150 pagesGeneric Data Mapper EnUS en-USn1kskeNo ratings yet
- Marc BitterDocument70 pagesMarc Bittern1kskeNo ratings yet
- Ipad Gestures and Commands With Focus ButtonsDocument1 pageIpad Gestures and Commands With Focus Buttonsn1kskeNo ratings yet
- Gredhd GB Georeva2016Document2 pagesGredhd GB Georeva2016n1kskeNo ratings yet
- CBSE Class 12 Physics Important Questions Ray Optics and OpticalDocument44 pagesCBSE Class 12 Physics Important Questions Ray Optics and OpticalScience 039 XIIA Shreshthata PujariNo ratings yet
- How To Understand Pixels, Resolution, and ResizeDocument2 pagesHow To Understand Pixels, Resolution, and ResizeNic KoiNo ratings yet
- A Practical Method For Measuring The Spatial Frequency Response of Light Field CamerasDocument5 pagesA Practical Method For Measuring The Spatial Frequency Response of Light Field CamerasYang YangNo ratings yet
- Biological Confocal Microscopy Handbook Of: Third EditionDocument28 pagesBiological Confocal Microscopy Handbook Of: Third EditionSinaid Alvarez-CervantesNo ratings yet
- DH-HAC-D1A21: 2MP HDCVI IR Dome CameraDocument3 pagesDH-HAC-D1A21: 2MP HDCVI IR Dome CameraIsmael ChoixNo ratings yet
- American Cinematographer 1921 Vol 2 No 14 PDFDocument4 pagesAmerican Cinematographer 1921 Vol 2 No 14 PDFbrad_rushingNo ratings yet
- Intelligent Rain Sensing and Fuzzy Wiper Control Algorithm For Vision-Based Smart Windshield Wiper SystemDocument8 pagesIntelligent Rain Sensing and Fuzzy Wiper Control Algorithm For Vision-Based Smart Windshield Wiper SystemBrian LaiNo ratings yet
- Gonzalez Klarivel - Ansel Adams BiographyDocument2 pagesGonzalez Klarivel - Ansel Adams Biographyapi-527818304No ratings yet
- Forensic Photography ModuleDocument37 pagesForensic Photography ModuleStephanie Shanne VenturaNo ratings yet
- GML C Camera Calibration ToolboxDocument5 pagesGML C Camera Calibration ToolboxPambudiSusilaNo ratings yet
- EP0575031A2Document96 pagesEP0575031A2Jheferson FernandesNo ratings yet
- Minel-Schereder - Katalog 2020 PDFDocument296 pagesMinel-Schereder - Katalog 2020 PDFSoultechLoveNo ratings yet
- CGMB 594 Digital Photography Name:Haizal Haizuan Bin Hamzah No ID:Gm093939 Lect: TJ IskandarDocument11 pagesCGMB 594 Digital Photography Name:Haizal Haizuan Bin Hamzah No ID:Gm093939 Lect: TJ IskandarhaizalNo ratings yet
- VPL-PHZ50: 5,000 Lumens Laser Light Source ProjectorDocument10 pagesVPL-PHZ50: 5,000 Lumens Laser Light Source ProjectorAbdul Salam NMNo ratings yet
- Wander 2016 Clinical Dental Photography in Orthodontic PracticeDocument7 pagesWander 2016 Clinical Dental Photography in Orthodontic Practiceoliver chauzaNo ratings yet
- The Ace of Management: ColourDocument4 pagesThe Ace of Management: ColourMadi ShimizuNo ratings yet
- Alfred Stieglitz Photographer's PresentationDocument8 pagesAlfred Stieglitz Photographer's PresentationRahulNo ratings yet
- PromptDocument4 pagesPromptВокруг СтереоNo ratings yet
- Auto Pilot Mode Technology in VehiclesDocument21 pagesAuto Pilot Mode Technology in VehiclesSowmya50% (2)
- Anthropocene Revised EssayDocument5 pagesAnthropocene Revised Essayapi-709510043No ratings yet
- Creative Destruction & Transformation of Incumbent CompaniesDocument29 pagesCreative Destruction & Transformation of Incumbent Companiesjshen5No ratings yet
- Assignment 3 - YAN Donald - 200126380Document14 pagesAssignment 3 - YAN Donald - 200126380willismok1No ratings yet
- Method Statement For Installation of CCTV Camera SystemDocument6 pagesMethod Statement For Installation of CCTV Camera SystemAleen Gamal Al-DinjiNo ratings yet
- Lista de Precios Andy Astron Enero-2Document40 pagesLista de Precios Andy Astron Enero-2Daniel ValenciaNo ratings yet
- The Eyes of LITENINGDocument13 pagesThe Eyes of LITENINGOfek KuznikNo ratings yet
- Installation CCTV Invoice for Jepara Ourland ParkDocument1 pageInstallation CCTV Invoice for Jepara Ourland ParkFahrur Ahmad50% (2)
- Lenovo Moto One Fusion Level 2 - Service and Repair ManualDocument105 pagesLenovo Moto One Fusion Level 2 - Service and Repair ManualHarnon SouzaNo ratings yet