You might also like
- EL9800e Ver3.02Document31 pagesEL9800e Ver3.02mikeNo ratings yet
- EL9800e Ver2.1Document12 pagesEL9800e Ver2.1mikeNo ratings yet
- Beckhoff FB1130 V15Document20 pagesBeckhoff FB1130 V15mikeNo ratings yet
- EL9820 EL9821e Ver1.2Document9 pagesEL9820 EL9821e Ver1.2mikeNo ratings yet
- Beckhoff FB1122 0 V11Document20 pagesBeckhoff FB1122 0 V11mikeNo ratings yet
- Hardware Data Sheet FB1111-0140 FB1111-0141 FB1111-0142 Piggyback Controller BoardsDocument30 pagesHardware Data Sheet FB1111-0140 FB1111-0141 FB1111-0142 Piggyback Controller BoardsmikeNo ratings yet
- PROFIBUS Technical Description GuideDocument1 pagePROFIBUS Technical Description GuidemikeNo ratings yet
- AN ESC Comparison V1i7Document16 pagesAN ESC Comparison V1i7mikeNo ratings yet
- Beckhoff FB1120 0 V10Document20 pagesBeckhoff FB1120 0 V10mikeNo ratings yet
- PRO2 - 11E - Solution SuggestionsDocument61 pagesPRO2 - 11E - Solution SuggestionsmikeNo ratings yet
- AN EL9800 V1i1Document33 pagesAN EL9800 V1i1mikeNo ratings yet
- Application Note: Sample Schematic Ethercat Slave Controller (Et1100) With 2 Mii Ports (Micrel Ks8721Bl)Document9 pagesApplication Note: Sample Schematic Ethercat Slave Controller (Et1100) With 2 Mii Ports (Micrel Ks8721Bl)mikeNo ratings yet
- Answer Key: MELSEC Programmable Controllers Basic CourseDocument3 pagesAnswer Key: MELSEC Programmable Controllers Basic CoursemikeNo ratings yet
- Siemens: Communication Simatic S5 Profibus (KO-KS5L2)Document1 pageSiemens: Communication Simatic S5 Profibus (KO-KS5L2)Victor YosafatNo ratings yet
- PRO1 17E Solution SuggestionsDocument49 pagesPRO1 17E Solution SuggestionsLộc QuangNo ratings yet
- ToolBuilder PDFDocument107 pagesToolBuilder PDFmikeNo ratings yet
- CoverDocument1 pageCoversokol_poleceNo ratings yet
- Answer Key: MELSEC Programmable Controllers Basic CourseDocument3 pagesAnswer Key: MELSEC Programmable Controllers Basic CoursemikeNo ratings yet
- Answer Key: MELSEC Programmable Controllers Basic CourseDocument1 pageAnswer Key: MELSEC Programmable Controllers Basic CoursemikeNo ratings yet
- Answer Key: MELSEC Programmable Controllers Basic CourseDocument3 pagesAnswer Key: MELSEC Programmable Controllers Basic CoursemikeNo ratings yet
- Answer Key: MELSEC Programmable Controllers Basic CourseDocument4 pagesAnswer Key: MELSEC Programmable Controllers Basic CoursemikeNo ratings yet
- PLC Training ManualQ Series Basic Course (For GX Developer) EDocument374 pagesPLC Training ManualQ Series Basic Course (For GX Developer) EHamdan AbdurrahmanNo ratings yet
- Answer Key: MELSEC Programmable Controllers Basic CourseDocument4 pagesAnswer Key: MELSEC Programmable Controllers Basic CoursemikeNo ratings yet
- CC-Link System Master/Local Module: QJ61BT11NDocument18 pagesCC-Link System Master/Local Module: QJ61BT11Nmike100% (1)
- SISTRAIN PRO3 02E FBs Multi Instances - 2 PDFDocument32 pagesSISTRAIN PRO3 02E FBs Multi Instances - 2 PDFSam eagle goodNo ratings yet
- Quick Start Guide: Ethernet Communication With Mitsubishi Q PlcsDocument34 pagesQuick Start Guide: Ethernet Communication With Mitsubishi Q PlcsmikeNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Switching Interview Questions and Answers Vol 1.0Document14 pagesSwitching Interview Questions and Answers Vol 1.0Eduardo AguilarNo ratings yet
- Network device configuration guideDocument1 pageNetwork device configuration guideGIULIANNO BOZZO MONCADANo ratings yet
- HP Compaq Presario 2100 (AMD) Quanta KT3I T2.2 SchematicsDocument30 pagesHP Compaq Presario 2100 (AMD) Quanta KT3I T2.2 SchematicsHoracio AlvarezNo ratings yet
- Blessing Komponen 13 Desember 2023Document264 pagesBlessing Komponen 13 Desember 2023dwikcahyo106No ratings yet
- Ecs H61h2-A Rev 1.0Document31 pagesEcs H61h2-A Rev 1.0Brian H. AdiwinataNo ratings yet
- Forum - Hocvienit.vn - Toshiba Satellite C50-A PT10SG - R11 - 20130226 - FinalDocument68 pagesForum - Hocvienit.vn - Toshiba Satellite C50-A PT10SG - R11 - 20130226 - FinalKarim Karimm0% (1)
- Ibm - R61i Vga ShareDocument100 pagesIbm - R61i Vga Shareحسن علي نوفلNo ratings yet
- Inventec A10 PCB design and specificationsDocument72 pagesInventec A10 PCB design and specificationsDelwar HossainNo ratings yet
- PA-Y10 User ManualDocument1 pagePA-Y10 User Manualrayanmaulana1933No ratings yet
- GA-H61M-S1 Technical SpecificationsDocument29 pagesGA-H61M-S1 Technical Specificationssỹ QuốcNo ratings yet
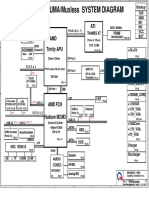
- R53 Amd Comal Uma/Muxless System Diagram: ATI AMD Trinity APUDocument44 pagesR53 Amd Comal Uma/Muxless System Diagram: ATI AMD Trinity APUKondrat SusipatovNo ratings yet
- 好例子网 RTL8211FS V18Document100 pages好例子网 RTL8211FS V18tt wNo ratings yet
- IE-SW-BL05-5TX Data SheetDocument4 pagesIE-SW-BL05-5TX Data Sheettuandanhbk10No ratings yet
- HP Probook 6550b 6050A2326701-MB-A02 Diesel 10 DISCRETE SchematicsDocument65 pagesHP Probook 6550b 6050A2326701-MB-A02 Diesel 10 DISCRETE Schematicsal shoaaNo ratings yet
- Acer Vellfire x01 SchematicDocument139 pagesAcer Vellfire x01 Schematicjawad anwarNo ratings yet
- E3 Series Gamewell-Cable Programmer-1Document1 pageE3 Series Gamewell-Cable Programmer-1RuthMarloNo ratings yet
- Gigabyte Ga-H61m-S2p Rev. 2.01 SCHDocument32 pagesGigabyte Ga-H61m-S2p Rev. 2.01 SCHGadis Sisca MeilaniNo ratings yet
- USB Type-C R2.2 ECN - Cable Flex Testing UpdateDocument3 pagesUSB Type-C R2.2 ECN - Cable Flex Testing UpdateimtangyuweiNo ratings yet
- Acer DA0ZQ1MB8F0 Quanta Zq1Document46 pagesAcer DA0ZQ1MB8F0 Quanta Zq1sergio_chagas100% (1)
- Clevo W940su2, W941su2-T Shark Bay Ult 6-7P-W5S27-005, 6-71-W5s20-D02aDocument38 pagesClevo W940su2, W941su2-T Shark Bay Ult 6-7P-W5S27-005, 6-71-W5s20-D02aMatias MareNo ratings yet
- CR-1: @DESIGN.D3SDV(SCH_1):PAGEDocument98 pagesCR-1: @DESIGN.D3SDV(SCH_1):PAGEtumelo7ishmael7mogalNo ratings yet
- CCIE Data Center Storage Networking Hardware ArchitectureDocument4 pagesCCIE Data Center Storage Networking Hardware Architectureradi permanaNo ratings yet
- Loop-IP6820 Self-Healing Ring NTUDocument10 pagesLoop-IP6820 Self-Healing Ring NTUedithsonNo ratings yet
- Dual Socket 370 Pentium® III SBC with VGA/Dual LAN/SCSI (133 MHz FSBDocument1 pageDual Socket 370 Pentium® III SBC with VGA/Dual LAN/SCSI (133 MHz FSBangevilessNo ratings yet
- HP Compaq Nx7400 Inventec Gallo1.0 Rev A01 SchematicsDocument58 pagesHP Compaq Nx7400 Inventec Gallo1.0 Rev A01 SchematicsMax WhittenNo ratings yet
- USB Media Compatibility List for Innov-is ProductsDocument4 pagesUSB Media Compatibility List for Innov-is ProductsRenato RochaNo ratings yet
- PricelistDocument9 pagesPricelist9076.rahmanNo ratings yet
- Dell Networking Optics Spec SheetDocument10 pagesDell Networking Optics Spec SheetAnton KobrinskyNo ratings yet
- Acer Aspire M3-581 M5-800Document93 pagesAcer Aspire M3-581 M5-800joao batistaNo ratings yet
- LB# 820-1372 - 051-6278 - A000.schematicDocument44 pagesLB# 820-1372 - 051-6278 - A000.schematicLuis SanchezNo ratings yet