You might also like
- Database Programming With SQL: Relational Database Technology Practice ActivitiesDocument5 pagesDatabase Programming With SQL: Relational Database Technology Practice Activitieschristian tombilayukNo ratings yet
- PDF pt203 Sos Nutanix TroubleshootingDocument26 pagesPDF pt203 Sos Nutanix TroubleshootingAdiWidyantoNo ratings yet
- Distributed Systems: Replication and Consistency: Fall 2013Document56 pagesDistributed Systems: Replication and Consistency: Fall 2013Jivesh GargNo ratings yet
- Fault Tolerance: CS403/534 Distributed Systems Erkay Savas Sabanci UniversityDocument47 pagesFault Tolerance: CS403/534 Distributed Systems Erkay Savas Sabanci UniversityUmesh ThoriyaNo ratings yet
- Unit 4Document11 pagesUnit 4dhirti.talreja173No ratings yet
- Fault Tolerance NotesDocument101 pagesFault Tolerance NotesaditandaditNo ratings yet
- Chapter 7aDocument29 pagesChapter 7aUmesh ThoriyaNo ratings yet
- Fault Tolerance and Consensus: C. Bettini - Distributed and Pervasive SystemsDocument10 pagesFault Tolerance and Consensus: C. Bettini - Distributed and Pervasive SystemsDanielDingoDissegnaNo ratings yet
- Fault ToleranceDocument49 pagesFault ToleranceMaria NgigiNo ratings yet
- FaultDocument101 pagesFaults.b.v.seshagiri1407No ratings yet
- 25 DistributedCoordinationDocument30 pages25 DistributedCoordinationbikramNo ratings yet
- Big Data Computing - Assignment 4Document4 pagesBig Data Computing - Assignment 4VarshaMegaNo ratings yet
- Chapter 06 Fault - ToleranceDocument30 pagesChapter 06 Fault - ToleranceKassahun Aklilu (Sew hun)No ratings yet
- Wolkite University College of Computing and Informatics Information Technology DepartmentDocument35 pagesWolkite University College of Computing and Informatics Information Technology DepartmentKidist AsefaNo ratings yet
- Fault Tolerance:-: Introduction, Process Resilience, Distributed Commit, RecoveryDocument52 pagesFault Tolerance:-: Introduction, Process Resilience, Distributed Commit, RecoveryNeha RohillaNo ratings yet
- Process Resilience: by Ravalika PolaDocument17 pagesProcess Resilience: by Ravalika PolaMohammad Saquib AlamNo ratings yet
- Distributed Systems - Fault ToleranceDocument21 pagesDistributed Systems - Fault ToleranceasdNo ratings yet
- hGCOMM PDFDocument22 pageshGCOMM PDFSai ShankarNo ratings yet
- Fault System OneDocument19 pagesFault System OneSachin GautamNo ratings yet
- Chapte Four DSDocument37 pagesChapte Four DSTadesse DakabaNo ratings yet
- Lecture 9Document19 pagesLecture 9Aeman AkramNo ratings yet
- CH 4Document25 pagesCH 4Natanem YimerNo ratings yet
- Da21 IntroductionDocument55 pagesDa21 IntroductionSurvey TakerNo ratings yet
- Consensus FailureDocument79 pagesConsensus Failureyiğit_ÖksüzNo ratings yet
- Fault Tolerance: Click To Add Text Dealing Successfully With Partial System. Key Technique: RedundancyDocument48 pagesFault Tolerance: Click To Add Text Dealing Successfully With Partial System. Key Technique: RedundancysenguptaNo ratings yet
- CS 268: Lecture 20 Classic Distributed Systems: Bayou and BFTDocument29 pagesCS 268: Lecture 20 Classic Distributed Systems: Bayou and BFTRose GirlNo ratings yet
- Chapter 8 Fault Tolerance: - Systems - Requirements For Dependable SystemsDocument7 pagesChapter 8 Fault Tolerance: - Systems - Requirements For Dependable SystemsBAHIRU GEZAHGNENo ratings yet
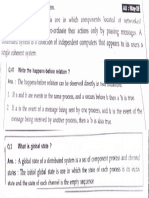
- Computers Communicate and Co-Ordinate Their Actions Only by Passing Mcssages. ADocument10 pagesComputers Communicate and Co-Ordinate Their Actions Only by Passing Mcssages. Asambavam channelNo ratings yet
- Freedman La Groups 06Document6 pagesFreedman La Groups 06Nghĩa ZerNo ratings yet
- 5.2 Coordination and AgreementDocument38 pages5.2 Coordination and AgreementSamvitNo ratings yet
- CheckpointingDocument20 pagesCheckpointingPalaniappan SamNo ratings yet
- Lab 2 Group Communication: Andreas LarssonDocument34 pagesLab 2 Group Communication: Andreas LarssonAdrian CatapatNo ratings yet
- Unit 3-SummaryDocument1 pageUnit 3-SummarycvvhgdhghhNo ratings yet
- Chapter 8-Fault ToleranceDocument30 pagesChapter 8-Fault ToleranceMohamedsultan AwolNo ratings yet
- H-Out Of-K Mutual Exclusion Algorithm: A Fault-Tolerant Using Cohorts Coteries For Distributed SystemsDocument47 pagesH-Out Of-K Mutual Exclusion Algorithm: A Fault-Tolerant Using Cohorts Coteries For Distributed SystemsSivaraman P. S.No ratings yet
- Security: Strategies For Securing Distributed SystemsDocument64 pagesSecurity: Strategies For Securing Distributed Systemsareeba khanNo ratings yet
- Last Class: Clock Synchronization: Logical Clocks Vector Clocks Global StateDocument13 pagesLast Class: Clock Synchronization: Logical Clocks Vector Clocks Global Stateluis_020_913056No ratings yet
- Arnold CoordinatedCheckpointingDocument31 pagesArnold CoordinatedCheckpointingEtefa BelachewNo ratings yet
- Synchronous Systems With FailuresDocument9 pagesSynchronous Systems With Failuresvigneshg463No ratings yet
- Distributed Operating SystemsDocument21 pagesDistributed Operating SystemsGowriNo ratings yet
- Lect 1Document25 pagesLect 1Dev MohamdNo ratings yet
- Chapter 4Document35 pagesChapter 4joNo ratings yet
- LogicDocument66 pagesLogicRoha CbcNo ratings yet
- 08 FalhasDocument41 pages08 FalhasDaniella CostaNo ratings yet
- Assignment 04 BigData Computing Noc23-Cs112Document7 pagesAssignment 04 BigData Computing Noc23-Cs112BALAJI MNo ratings yet
- All MergedDocument179 pagesAll MergedATHARVA KHOKRALENo ratings yet
- Chapter Four: Data Link LayerDocument35 pagesChapter Four: Data Link LayerAbera BrhanuNo ratings yet
- Lecture 04Document49 pagesLecture 04atikNo ratings yet
- Lecture Notes: Basic ConceptsDocument6 pagesLecture Notes: Basic ConceptsTESFAHUNNo ratings yet
- 13) A Distributed System: FeasibilityDocument5 pages13) A Distributed System: Feasibilitybahiru belinaNo ratings yet
- CS 194: Distributed SystemsDocument15 pagesCS 194: Distributed SystemsKarthik KannanNo ratings yet
- Res Net 2Document40 pagesRes Net 2jaffar bikatNo ratings yet
- Security in Wireless Sensor NetworksDocument39 pagesSecurity in Wireless Sensor NetworksSamina MohsinNo ratings yet
- MJF Distributed Computing Series 1Document21 pagesMJF Distributed Computing Series 1Gamer boyNo ratings yet
- Distributed SystemDocument5 pagesDistributed SystemshubhamsemiloNo ratings yet
- Numerical MethodDocument9 pagesNumerical Methodxifila5115No ratings yet
- Chapter 8-Fault ToleranceDocument71 pagesChapter 8-Fault ToleranceSolomon W. Demissie100% (1)
- Group Communications: (A) Fault Tolerance Based On Replicated ServersDocument10 pagesGroup Communications: (A) Fault Tolerance Based On Replicated ServersKannan KrishnamurthyNo ratings yet
- Distributed Mutual Exclusion: Lecture NotesDocument12 pagesDistributed Mutual Exclusion: Lecture NotesTESFAHUNNo ratings yet
- Chapter 14: Consensus and Agreement: Ajay Kshemkalyani and Mukesh SinghalDocument55 pagesChapter 14: Consensus and Agreement: Ajay Kshemkalyani and Mukesh SinghalsoujanaNo ratings yet
- Uid & Ooad SyllabusDocument2 pagesUid & Ooad SyllabusDeepanarendraNo ratings yet
- NDG Linux Essential - Chapter 5 NotesDocument14 pagesNDG Linux Essential - Chapter 5 NotesFrancisNo ratings yet
- E 24713Document350 pagesE 24713Jai KanthNo ratings yet
- Core Java Amity TutDocument5 pagesCore Java Amity TutRaghav GogiaNo ratings yet
- Using Default .Ycm - Extra - Conf - Py, The Standard c++11 Headers Are Not Found. Issue #303 Ycm-Core - YouCompleteMeDocument10 pagesUsing Default .Ycm - Extra - Conf - Py, The Standard c++11 Headers Are Not Found. Issue #303 Ycm-Core - YouCompleteMeFrankie LiuNo ratings yet
- Jansi Rani - ResumeDocument4 pagesJansi Rani - ResumeDilip G NarappanavarNo ratings yet
- Ip Practical File Class 12 - B JyotiDocument25 pagesIp Practical File Class 12 - B JyotiMahi SrivastavaNo ratings yet
- Uddi TutorialDocument11 pagesUddi TutorialAnusha Reddy0% (1)
- Setup Guide: Google Cloud Platform Account SetupDocument14 pagesSetup Guide: Google Cloud Platform Account SetupAnkush SharmaNo ratings yet
- HDLCDocument34 pagesHDLCBella EdNo ratings yet
- Nguyenvanthinh BKC13107 N01Document35 pagesNguyenvanthinh BKC13107 N01Văn thinh NguyenNo ratings yet
- Lab. No: 4, Date: 17/02/2023, Day:Friday Topic: List-Tuple-Set-DictDocument8 pagesLab. No: 4, Date: 17/02/2023, Day:Friday Topic: List-Tuple-Set-DictDristant PandaNo ratings yet
- Module-3 (Part-2)Document46 pagesModule-3 (Part-2)sujithNo ratings yet
- Establishment: and The Data Warehousing AND They UseDocument18 pagesEstablishment: and The Data Warehousing AND They UseMaria Anne Marianne AyangNo ratings yet
- SharePoint Development Standards2Document10 pagesSharePoint Development Standards2Murali KrishanNo ratings yet
- Text To Speech Converter DocumentationDocument28 pagesText To Speech Converter DocumentationRanjitha H R67% (3)
- Richfaces ReferenceDocument889 pagesRichfaces ReferencescokpinarNo ratings yet
- Question Sheet (HTML) : Underline The Error(s) in The HTML Codes Below (If You Find Any) &write Its CorrectionDocument4 pagesQuestion Sheet (HTML) : Underline The Error(s) in The HTML Codes Below (If You Find Any) &write Its CorrectionSama Atif Abdel-LatifNo ratings yet
- Lab7 (Dealing With Polymorphism and Inheritance)Document18 pagesLab7 (Dealing With Polymorphism and Inheritance)Nicole ParallagNo ratings yet
- Com Prog I Using C SyllabusDocument4 pagesCom Prog I Using C SyllabusFranklin TamayoNo ratings yet
- Telangana University SRNK Govt. Degree College, Banswada: ProjectDocument26 pagesTelangana University SRNK Govt. Degree College, Banswada: ProjectKatroth PurushothamNo ratings yet
- The Architecture Process: Memi LaviDocument11 pagesThe Architecture Process: Memi LavijerryhamstersgNo ratings yet
- Final Lab ReportDocument184 pagesFinal Lab ReportRyu KenNo ratings yet
- Zabbix 5 IT Infrastructure Monitoring Cookbook11-20Document10 pagesZabbix 5 IT Infrastructure Monitoring Cookbook11-20Jay MenonNo ratings yet
- Processes and Threads: 2.1 Processes 2.2 Threads 2.3 Interprocess Communication 2.4 Classical IPC Problems 2.5 SchedulingDocument55 pagesProcesses and Threads: 2.1 Processes 2.2 Threads 2.3 Interprocess Communication 2.4 Classical IPC Problems 2.5 SchedulingManasa M RNo ratings yet
- Software Installation GuideDocument13 pagesSoftware Installation GuideIvan FontalvoNo ratings yet
- Practical-05 Theory: Step 1Document2 pagesPractical-05 Theory: Step 1seyNo ratings yet
- Unit 4Document15 pagesUnit 420jg1a4214.swapnaNo ratings yet
- Object Oriented Design HEAD FIRST NOTESDocument27 pagesObject Oriented Design HEAD FIRST NOTESManpreet KaurNo ratings yet