You might also like
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- LVDT, Sensors & Transducers (EE-802B), 8th Semester, B.tech. EE, MAKAUT - Erudition PaperDocument1 pageLVDT, Sensors & Transducers (EE-802B), 8th Semester, B.tech. EE, MAKAUT - Erudition PaperSahadev RoyNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Electronic Question PaperDocument4 pagesElectronic Question PaperSahadev RoyNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- 1.1 Addressing ModesDocument10 pages1.1 Addressing ModesSahadev RoyNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Towards Trustworthy Smart Cyber-Physical-SocialDocument6 pagesTowards Trustworthy Smart Cyber-Physical-SocialSahadev RoyNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- 1.1 Addressing ModesDocument10 pages1.1 Addressing ModesSahadev RoyNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Ain Shyam 1Document1 pageAin Shyam 1Sahadev RoyNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Hybrid Intelligence for Robotics and Industrial Automation Hierarchical ParadigmDocument25 pagesHybrid Intelligence for Robotics and Industrial Automation Hierarchical ParadigmSahadev RoyNo ratings yet
- Performance Improvement of A Microstrip Patch Antenna by Using Electromagnetic Band Gap and Defected Ground StructuresDocument4 pagesPerformance Improvement of A Microstrip Patch Antenna by Using Electromagnetic Band Gap and Defected Ground StructuresSahadev RoyNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Ain Shyam 1Document1 pageAin Shyam 1Sahadev RoyNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Ijoaem 202109Document20 pagesIjoaem 202109Sahadev RoyNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Popular Lecture Series On Start-Up & Innovation On Toys Mr. Sushant PattnaikDocument1 pagePopular Lecture Series On Start-Up & Innovation On Toys Mr. Sushant PattnaikSahadev RoyNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Rezvani2019 Article Circularly-PolarizedAndHigh-EfDocument5 pagesRezvani2019 Article Circularly-PolarizedAndHigh-EfSahadev RoyNo ratings yet
- Microprocessor BY Ramesh Gaonkar (Color) PDFDocument832 pagesMicroprocessor BY Ramesh Gaonkar (Color) PDFpabitra mohan sahoo92% (26)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- IJOAEM VOL 4 NO 4 Paper 5Document6 pagesIJOAEM VOL 4 NO 4 Paper 5Sahadev RoyNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Lekhi Public School Class-VIII MATHS Worksheet Chapter - 1 Rational NumbersDocument1 pageLekhi Public School Class-VIII MATHS Worksheet Chapter - 1 Rational NumbersSahadev RoyNo ratings yet
- Ijoaem 202109Document20 pagesIjoaem 202109Sahadev RoyNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Book IRCTC ticket onlineDocument2 pagesBook IRCTC ticket onlineHimanshu GuptaNo ratings yet
- Managing Diversity: Key to Organizational SurvivalDocument6 pagesManaging Diversity: Key to Organizational SurvivalSahadev RoyNo ratings yet
- Interior Pipe Mountaineering Device Assessment Robot: Muhammad Shurjeel Amjad and Salman AhmadDocument7 pagesInterior Pipe Mountaineering Device Assessment Robot: Muhammad Shurjeel Amjad and Salman AhmadSahadev RoyNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Soft Copy of Wiley Final Book ListDocument13 pagesSoft Copy of Wiley Final Book ListSahadev RoyNo ratings yet
- Interior Pipe Mountaineering Device Assessment Robot: Muhammad Shurjeel Amjad and Salman AhmadDocument7 pagesInterior Pipe Mountaineering Device Assessment Robot: Muhammad Shurjeel Amjad and Salman AhmadSahadev RoyNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Design A Compact Tri-Band Band Pass Filter UsingDocument4 pagesDesign A Compact Tri-Band Band Pass Filter UsingSahadev RoyNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- X-Ray Diffraction and Patterns: Diffraction Techniques Application For Food Quality Assurance in Bio-Food IndustryDocument6 pagesX-Ray Diffraction and Patterns: Diffraction Techniques Application For Food Quality Assurance in Bio-Food IndustrySahadev RoyNo ratings yet
- Low Cost Obstacle Avoidance RobotDocument4 pagesLow Cost Obstacle Avoidance RobotSahadev RoyNo ratings yet
- Ijoaem 5 VinodDocument13 pagesIjoaem 5 VinodSahadev RoyNo ratings yet
- Innovation and System DesignDocument4 pagesInnovation and System DesignSahadev RoyNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- FABRICATION OF MICROHEATER AND INTER - DIGITED ELECTRODES ON SILICON PLATFORM FOR LOW POWER IN-TEGRATED GAS SENSOR APPLICATIONS by Sahadev RoyDocument5 pagesFABRICATION OF MICROHEATER AND INTER - DIGITED ELECTRODES ON SILICON PLATFORM FOR LOW POWER IN-TEGRATED GAS SENSOR APPLICATIONS by Sahadev RoySahadev RoyNo ratings yet
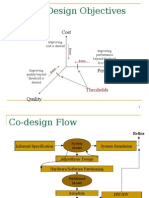
- Review: Design Objectives: ThresholdsDocument19 pagesReview: Design Objectives: ThresholdsSahadev RoyNo ratings yet
- Minterms Generations Algorithm Using Weighted Sum Method by Sahadev Roy International Journal On Current Science & Technology ISSN: 2320 5636Pp 34-38vol.-1 No.-2 July-Dec 2013Document4 pagesMinterms Generations Algorithm Using Weighted Sum Method by Sahadev Roy International Journal On Current Science & Technology ISSN: 2320 5636Pp 34-38vol.-1 No.-2 July-Dec 2013Sahadev Roy100% (1)
- Flutter Seminar Report PDFDocument20 pagesFlutter Seminar Report PDFVèñky Akki44% (9)
- Application Notes UC3710TDocument16 pagesApplication Notes UC3710TSHAHID_71No ratings yet
- 11th Science Maths Answer KeyDocument15 pages11th Science Maths Answer KeyBhavesh AsapureNo ratings yet
- Thermodynamic and transport properties of saturated steam and waterDocument26 pagesThermodynamic and transport properties of saturated steam and waterMuhammad Reza FahleviNo ratings yet
- Production of AcrylonitrileDocument91 pagesProduction of Acrylonitrilegautham14360% (5)
- Lightweight Universal Formwork For Walls, Slabs, Columns and FoundationsDocument52 pagesLightweight Universal Formwork For Walls, Slabs, Columns and FoundationsKrishiv ChanglaniNo ratings yet
- DMF-Purpose FailuresDocument1 pageDMF-Purpose FailuresLucky TraderNo ratings yet
- Cisco Ccna Presentation SlideDocument623 pagesCisco Ccna Presentation SlideKomal Ahmad100% (1)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Nonuniformity Correction and Correctability of Ir Fpa Schulz1995Document15 pagesNonuniformity Correction and Correctability of Ir Fpa Schulz1995sapa3No ratings yet
- End Sem - Solution & Marking SchemeDocument41 pagesEnd Sem - Solution & Marking SchemeHaryanvi ChhoraNo ratings yet
- JBMO ShortLists-2001Document2 pagesJBMO ShortLists-2001OklaNo ratings yet
- HW 01Document2 pagesHW 01Hëņřý ØjđNo ratings yet
- C Language Basic Programs Which Used For BigginnersDocument112 pagesC Language Basic Programs Which Used For BigginnersRavikumar VendiNo ratings yet
- Sandvik 2RE69 Stainless Steel DatasheetDocument9 pagesSandvik 2RE69 Stainless Steel DatasheetMuzammilNo ratings yet
- SPM Physics Revision Guide: Test Specs, Questions Analysis, Key ConceptsDocument184 pagesSPM Physics Revision Guide: Test Specs, Questions Analysis, Key ConceptsSiti Arbaiyah AhmadNo ratings yet
- K-Gamma and K-Beta FunctionDocument5 pagesK-Gamma and K-Beta FunctionketashiNo ratings yet
- Karmaveer Bhaurao Patil Polytechnic, Satara: Control ActionsDocument104 pagesKarmaveer Bhaurao Patil Polytechnic, Satara: Control Actionsmohammd imran azizNo ratings yet
- Technical White Paper For ATM-ETH IWFDocument12 pagesTechnical White Paper For ATM-ETH IWFNeil_Liao_343No ratings yet
- C 78 - 94 QZC4LTK0Document3 pagesC 78 - 94 QZC4LTK0Rufo CascoNo ratings yet
- Electric and water requirements for concrete batch plantDocument8 pagesElectric and water requirements for concrete batch plantWael WaelNo ratings yet
- Maths Practice Test with Multiple Choice QuestionsDocument8 pagesMaths Practice Test with Multiple Choice QuestionsBernard ChanNo ratings yet
- QTMD Pre-Session AssignmentDocument12 pagesQTMD Pre-Session AssignmentshrizanaNo ratings yet
- Zeek Case StudyDocument4 pagesZeek Case StudysuryanshNo ratings yet
- HTTP Gryllus - Net Blender 3DDocument3 pagesHTTP Gryllus - Net Blender 3Dmohsindalvi87No ratings yet
- CH311 - Experiment 6 - Sterol Extraction From Sea WaterDocument2 pagesCH311 - Experiment 6 - Sterol Extraction From Sea WaterNarelle IaumaNo ratings yet
- IBM DB2 10.5 For Linux, UNIX, and Windows - Data Movement Utilities Guide and ReferenceDocument293 pagesIBM DB2 10.5 For Linux, UNIX, and Windows - Data Movement Utilities Guide and ReferenceBupBeChanhNo ratings yet
- Effect of Upstream Dam Geometry On Peak Discharge During Overtopping Breach in Noncohesive Homogeneous Embankment Dams Implications For Tailings DamsDocument22 pagesEffect of Upstream Dam Geometry On Peak Discharge During Overtopping Breach in Noncohesive Homogeneous Embankment Dams Implications For Tailings DamsHelvecioNo ratings yet
- Structural beam drawingsDocument1 pageStructural beam drawingsnathan kNo ratings yet
- Why Single-Ended Tube AmplifiersDocument17 pagesWhy Single-Ended Tube Amplifiersjimmy67music100% (2)
- Phs SelectionsDocument5 pagesPhs SelectionsadycrsNo ratings yet
- Fundamentals of Hydrogen Production and Utilization in Fuel Cell SystemsFrom EverandFundamentals of Hydrogen Production and Utilization in Fuel Cell SystemsNo ratings yet
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesFrom EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesRating: 4.5 out of 5 stars4.5/5 (21)
- RV Living Collection: RV living for beginners, RV travel for the whole family, RV repair and RV mobile solar power: Experience Freedom on the roads alone or with your family with this collection. Learn how to repair your motorhome while using renewable energy!From EverandRV Living Collection: RV living for beginners, RV travel for the whole family, RV repair and RV mobile solar power: Experience Freedom on the roads alone or with your family with this collection. Learn how to repair your motorhome while using renewable energy!No ratings yet
- Introduction to Power System ProtectionFrom EverandIntroduction to Power System ProtectionRating: 5 out of 5 stars5/5 (1)
- OFF-GRID PROJECTS: A Comprehensive Beginner's Guide to Learn All about OffGrid Living from A-Z and Live a Life of Self-SufficiencyFrom EverandOFF-GRID PROJECTS: A Comprehensive Beginner's Guide to Learn All about OffGrid Living from A-Z and Live a Life of Self-SufficiencyNo ratings yet