You might also like
- RTCM SC-104 v3.2Document255 pagesRTCM SC-104 v3.2Yevhen SafronovNo ratings yet
- What Is RTK (Real-Time Kinematic) ?Document9 pagesWhat Is RTK (Real-Time Kinematic) ?Renz Janfort Junsay GraganzaNo ratings yet
- An Introduction To GNSSDocument70 pagesAn Introduction To GNSSHakim Fahmi100% (2)
- Gps Error Sources PDFDocument4 pagesGps Error Sources PDFPhillip0% (1)
- Unmanned Aerial Vehicles (UAVs)Document46 pagesUnmanned Aerial Vehicles (UAVs)shailzworldNo ratings yet
- Steel Joint Design (Double Angle)Document7 pagesSteel Joint Design (Double Angle)Wazini D. IzaniNo ratings yet
- Tutorial GPS Receiver Architectures - Front-End and Baseband Signal ProcessingDocument18 pagesTutorial GPS Receiver Architectures - Front-End and Baseband Signal Processinggaurav kumar100% (1)
- Transitions from Digital Communications to Quantum Communications: Concepts and ProspectsFrom EverandTransitions from Digital Communications to Quantum Communications: Concepts and ProspectsNo ratings yet
- The Use of GPS Disciplined Oscillators As Primary Frequency Standards For Calibration and Metrology LaboratoriesDocument10 pagesThe Use of GPS Disciplined Oscillators As Primary Frequency Standards For Calibration and Metrology LaboratoriesDaniel100% (1)
- GPS Power PointDocument18 pagesGPS Power PointAtri GulatiNo ratings yet
- PyGMTSAR: Sentinel-1 Python InSAR. An Introduction: Python InSAR, #1From EverandPyGMTSAR: Sentinel-1 Python InSAR. An Introduction: Python InSAR, #1No ratings yet
- Samyung GPS NF430 Service ManualDocument11 pagesSamyung GPS NF430 Service ManualReggie Buera100% (7)
- GNSS Receiver Zero Baseline Test Using GPS SignalDocument11 pagesGNSS Receiver Zero Baseline Test Using GPS Signalwn1529.20000No ratings yet
- Cycleslip Detection and Repair in Integrated Navigation SystemsDocument8 pagesCycleslip Detection and Repair in Integrated Navigation SystemsSki SundaeNo ratings yet
- Dual-Frequency GPS/GLONASS RTK: Experimental Results: Javad Positioning SystemsDocument4 pagesDual-Frequency GPS/GLONASS RTK: Experimental Results: Javad Positioning SystemsСергей ТатарченкоNo ratings yet
- 2007jan - GPS Receiver CalibrationDocument8 pages2007jan - GPS Receiver Calibrationnileshdesai857No ratings yet
- Electronics: Dynamic Performance Evaluation of Various GNSS Receivers and Positioning Modes With Only One Flight TestDocument21 pagesElectronics: Dynamic Performance Evaluation of Various GNSS Receivers and Positioning Modes With Only One Flight TestJuan David Garzón PachonNo ratings yet
- 98 e Aci 136Document7 pages98 e Aci 136Mohamad AlimadadiNo ratings yet
- How To Meet The Demanding Challenges Involved in Testing GNSS Receivers?Document10 pagesHow To Meet The Demanding Challenges Involved in Testing GNSS Receivers?Arindam ChakrabortyNo ratings yet
- The Global Positioning System Signals MeDocument23 pagesThe Global Positioning System Signals MeUNNATI AGRAWALNo ratings yet
- Enge-Aviation Benefits From GNSSDocument17 pagesEnge-Aviation Benefits From GNSSGabriel Rojas L.No ratings yet
- Verification Testing of A Multi-Gnss RF Signal SimulatorDocument10 pagesVerification Testing of A Multi-Gnss RF Signal SimulatorRuixin TuNo ratings yet
- A Subspace-Based Spatial and Temporal Multipath Mitigation For Multi-Antenna GPS ReceiverDocument11 pagesA Subspace-Based Spatial and Temporal Multipath Mitigation For Multi-Antenna GPS Receiverاحمد نديم اسماعيلNo ratings yet
- RTK PerformanceDocument8 pagesRTK PerformanceThanate JongrujinanNo ratings yet
- N8UR GPS Evaluation August2020Document44 pagesN8UR GPS Evaluation August2020extortionchloride610No ratings yet
- DGPS Surveying InstrumentDocument5 pagesDGPS Surveying InstrumentAnkit kumat100% (1)
- Analysis of Wireless Network in Nile University of Nigeria Using Markov Chain Redition With Gnss Logger App As ReceiverDocument16 pagesAnalysis of Wireless Network in Nile University of Nigeria Using Markov Chain Redition With Gnss Logger App As Receiverabdulmalik saniNo ratings yet
- Bec 401 Thesis Ii: TOPIC: Accuracy Comparison Between Ground Control Survey and Differential Global Positioning SystemDocument39 pagesBec 401 Thesis Ii: TOPIC: Accuracy Comparison Between Ground Control Survey and Differential Global Positioning SystemAlvinchiew CSNo ratings yet
- An Adaptive Pmu Based Fault Detection - Location Technique For Transmission Lines Part IIDocument11 pagesAn Adaptive Pmu Based Fault Detection - Location Technique For Transmission Lines Part IILucas MarinhoNo ratings yet
- Lecture 3 - Data Capturing Techniques - Total Station and GPSDocument26 pagesLecture 3 - Data Capturing Techniques - Total Station and GPSCisco ManNo ratings yet
- Glosary GpsDocument29 pagesGlosary GpsdidikhartadiNo ratings yet
- Interference Mitigation Approaches For The Global Positioning SystemDocument14 pagesInterference Mitigation Approaches For The Global Positioning SystemChadiNo ratings yet
- Ionospheric Scintillation Simulation On Equatorial GPS Signals For Dynamic PlatformsDocument12 pagesIonospheric Scintillation Simulation On Equatorial GPS Signals For Dynamic Platformsbidyutinsu30@gmail.comNo ratings yet
- VTC2015 ZanDocument6 pagesVTC2015 ZanGregory LevantNo ratings yet
- Lab JamDocument10 pagesLab JamIthel LtheiNo ratings yet
- Lecture 3Document17 pagesLecture 3Muhammad FahimNo ratings yet
- Airborne Kinematic GPSPositioningfor PhotogrammetryDocument11 pagesAirborne Kinematic GPSPositioningfor PhotogrammetryAzem GanuNo ratings yet
- TreasureSS PTechDocument52 pagesTreasureSS PTechruddyrezzaNo ratings yet
- Field Test of Long Range Terrestrial Laser Scanner and Ground-Based Synthetic Aperture Radar For Area Monitoring in Open Pit MinesDocument12 pagesField Test of Long Range Terrestrial Laser Scanner and Ground-Based Synthetic Aperture Radar For Area Monitoring in Open Pit Minesvictor elver guevara cerveraNo ratings yet
- SATRACKDocument22 pagesSATRACKapi-19937584100% (6)
- Chapter 1 - Differential GPS: RTO-AG-160-V21 1 - 1Document18 pagesChapter 1 - Differential GPS: RTO-AG-160-V21 1 - 1ravifireblade8402No ratings yet
- Whispers2018 Pix4d TargetlessDocument4 pagesWhispers2018 Pix4d TargetlesschristianbazanNo ratings yet
- Differential GPS For Small UAS Using ConDocument10 pagesDifferential GPS For Small UAS Using ConOlivier LaylyNo ratings yet
- Integrated Receiver Including Both Receiver Channel and TDC For A Pulsed Time-of-Flight Laser Rangefinder With Cm-Level AccuracyDocument12 pagesIntegrated Receiver Including Both Receiver Channel and TDC For A Pulsed Time-of-Flight Laser Rangefinder With Cm-Level Accuracyxiangyu gaoNo ratings yet
- 6 Trimble HD-GNSS White PaperDocument13 pages6 Trimble HD-GNSS White PaperpuputrahsetyoNo ratings yet
- Method of Estimating The Carrier Phase Generation Error by GNSS SimulatorsDocument14 pagesMethod of Estimating The Carrier Phase Generation Error by GNSS SimulatorsAditya KushwahaNo ratings yet
- Characterization and Field Evaluation of A Navigation Grade RLG SIMUDocument15 pagesCharacterization and Field Evaluation of A Navigation Grade RLG SIMUrandydalphNo ratings yet
- On The Location Accuracy of The Multi-AntennaDocument5 pagesOn The Location Accuracy of The Multi-Antennaاحمد نديم اسماعيلNo ratings yet
- SatrackDocument34 pagesSatrackshallinidivya100% (1)
- GPS Spoofing Detection FinalpdfDocument14 pagesGPS Spoofing Detection Finalpdf1309492110No ratings yet
- Low Cost GPS INS Sensor Fusion System For UAV NavigationDocument9 pagesLow Cost GPS INS Sensor Fusion System For UAV NavigationThaung Htut KhaungNo ratings yet
- Fuzzy Adaptive Kalman Filtering For INS/GPS Data Fusion: February 2000Document7 pagesFuzzy Adaptive Kalman Filtering For INS/GPS Data Fusion: February 2000alfaristelecomNo ratings yet
- Polynomial Interpolation of GPS Satellite CoordinaDocument7 pagesPolynomial Interpolation of GPS Satellite Coordinatolgacakir185No ratings yet
- Crosby 7B3Document7 pagesCrosby 7B3Евгений ПереверзевNo ratings yet
- A Wireless Channel Sounding System For Rapid Propagation MeasurementsDocument6 pagesA Wireless Channel Sounding System For Rapid Propagation MeasurementsGabriel SantosNo ratings yet
- LaRochelle IS AtlantaDocument8 pagesLaRochelle IS AtlantaEthanLaRochelleNo ratings yet
- Development of A Low-Cost Solution For GPSGyro AttDocument11 pagesDevelopment of A Low-Cost Solution For GPSGyro AttCamacho Camacho RochaNo ratings yet
- Assignment Geodesy 1Document11 pagesAssignment Geodesy 1budak_gisNo ratings yet
- Optimal Post-Detection Integration Technique For The Reacquisition of Weak GNSS SignalsDocument18 pagesOptimal Post-Detection Integration Technique For The Reacquisition of Weak GNSS SignalsNelarapuMaheshNo ratings yet
- Fruits Satrack DocumentationDocument22 pagesFruits Satrack Documentationmar 931996No ratings yet
- A Sensor Fusion Algorithm For Cooperative LocalizationDocument8 pagesA Sensor Fusion Algorithm For Cooperative LocalizationVijaya YajnanarayanaNo ratings yet
- SatracDocument18 pagesSatracvenkat_raj_38No ratings yet
- Satellite Based SurveyingDocument8 pagesSatellite Based SurveyingMusiime AlvinNo ratings yet
- POSMV - 2005 - 09 - Motion Sensor ComparisonDocument18 pagesPOSMV - 2005 - 09 - Motion Sensor Comparisonchakib tabNo ratings yet
- Satellite Navigation (GPS)Document28 pagesSatellite Navigation (GPS)NAJA MOHAMEDNo ratings yet
- Multipath Mitigation by Wavelet AnalysisDocument10 pagesMultipath Mitigation by Wavelet AnalysisAubin TsapongNo ratings yet
- Spline and Spline Wavelet Methods with Applications to Signal and Image Processing: Volume III: Selected TopicsFrom EverandSpline and Spline Wavelet Methods with Applications to Signal and Image Processing: Volume III: Selected TopicsNo ratings yet
- 11 New Cadastral System in Malaysia CCS NDCDB SVDocument94 pages11 New Cadastral System in Malaysia CCS NDCDB SVluta buliNo ratings yet
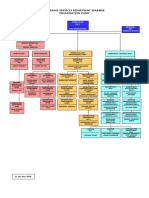
- Organisation Chart Sewage SarawakDocument1 pageOrganisation Chart Sewage Sarawakluta buliNo ratings yet
- 3 Surveying According To Section 396 of NLC 2Document155 pages3 Surveying According To Section 396 of NLC 2luta buliNo ratings yet
- Organisation Chart Sewage SarawakDocument1 pageOrganisation Chart Sewage Sarawakluta buliNo ratings yet
- Swklandcode ContentsDocument35 pagesSwklandcode Contentsluta buliNo ratings yet
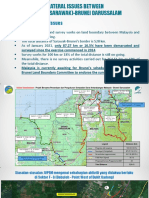
- 2021 LNS Report - Progress of Cooperation Sarawak - Brunei - 01february 2021Document3 pages2021 LNS Report - Progress of Cooperation Sarawak - Brunei - 01february 2021luta buliNo ratings yet
- Borang Soal Selidik - Kajian Kepuasan Pelanggan: Feedback Form - Customer Satisfaction SurveyDocument6 pagesBorang Soal Selidik - Kajian Kepuasan Pelanggan: Feedback Form - Customer Satisfaction Surveyluta buliNo ratings yet
- Theories & Concept of EntrepreneurshipDocument30 pagesTheories & Concept of Entrepreneurshipluta buliNo ratings yet
- Borang Soal Selidik - Kajian Kepuasan Pelanggan: Feedback Form - Customer Satisfaction SurveyDocument6 pagesBorang Soal Selidik - Kajian Kepuasan Pelanggan: Feedback Form - Customer Satisfaction Surveyluta buliNo ratings yet
- Groundwater Flow PDFDocument20 pagesGroundwater Flow PDFluta buliNo ratings yet
- Spotr: GPS Spoofing Detection Via Device FingerprintingDocument12 pagesSpotr: GPS Spoofing Detection Via Device FingerprintingDominic VinnyNo ratings yet
- Advanced Test Equipment Rentals: Power System SimulatorDocument5 pagesAdvanced Test Equipment Rentals: Power System SimulatorJex Aeron SeinsNo ratings yet
- Implementation of A Complete GPS Receiver On The CDocument12 pagesImplementation of A Complete GPS Receiver On The CJawad HmoumaneNo ratings yet
- EZ-Guide 250 Quick RefDocument6 pagesEZ-Guide 250 Quick RefGarethNo ratings yet
- Precision Farming by CNH:: Higher Yields, Lower Costs, Less LabourDocument207 pagesPrecision Farming by CNH:: Higher Yields, Lower Costs, Less Laboursbircea nhrNo ratings yet
- Rinex 301Document44 pagesRinex 301trian_escorNo ratings yet
- GMSvadakara AnswerDocument22 pagesGMSvadakara AnswerirshadNo ratings yet
- 1 GPSBasicsDocument37 pages1 GPSBasicsPritam RajNo ratings yet
- Trimble BX992 Datasheet 0121 LRDocument2 pagesTrimble BX992 Datasheet 0121 LRtio aulia basudewaNo ratings yet
- Scanning The Issue/Technology: Special Issue On Global Positioning SystemDocument13 pagesScanning The Issue/Technology: Special Issue On Global Positioning SystemwilliamateugeniodiazNo ratings yet
- Bridge Equip - Part 2Document39 pagesBridge Equip - Part 2Jayesh Solaskar100% (1)
- Software Defined Radio For GPS PDFDocument220 pagesSoftware Defined Radio For GPS PDFAndres German Ibarra BravoNo ratings yet
- Tim LC, Tim LF, Tim LP GpsDocument158 pagesTim LC, Tim LF, Tim LP GpsAnonymous JR1LSmN0sNo ratings yet
- Walker RTK ProposalDocument5 pagesWalker RTK ProposalВиталий ГемайNo ratings yet
- Zed-F9T: U-Blox F9 High Accuracy Timing ModuleDocument23 pagesZed-F9T: U-Blox F9 High Accuracy Timing Modulekar karNo ratings yet
- CSSI RVSM Mission Support and Training - Aircraft Specific TroubleshootingDocument12 pagesCSSI RVSM Mission Support and Training - Aircraft Specific TroubleshootingjuanpgutierrezNo ratings yet
- GPS SignalsDocument23 pagesGPS Signalskrishna144No ratings yet
- PolaRx2e@ DS V0306 3Document2 pagesPolaRx2e@ DS V0306 3mmjdaceNo ratings yet
- GPS PPT by Pankaj Palta 11092013Document27 pagesGPS PPT by Pankaj Palta 11092013Pankaj PaltaNo ratings yet
- Data Sheet: Leica Viva GS25Document2 pagesData Sheet: Leica Viva GS25Faizal Ibnu AdrianNo ratings yet
- GPS Receiver Architectures and Measurements: Proceedings of The IEEE February 1999Document18 pagesGPS Receiver Architectures and Measurements: Proceedings of The IEEE February 1999Abhay WadsingeNo ratings yet
- File 01 - GNSS - IntroDocument71 pagesFile 01 - GNSS - IntroAlex NkurunzizaNo ratings yet
- L2C PRN Code Assignments: 16 October 2019 EditionDocument3 pagesL2C PRN Code Assignments: 16 October 2019 EditionRodrigo Villela MachadoNo ratings yet
- RFID Based Bike Security SystemDocument2 pagesRFID Based Bike Security SystemPushpa Mohan AJNo ratings yet