Professional Documents
Culture Documents
Asservissement Numerique Horloge Atomique
Asservissement Numerique Horloge Atomique
Uploaded by
oussama0 ratings0% found this document useful (0 votes)
14 views164 pagesOriginal Title
Asservissement numerique horloge atomique
Copyright
© © All Rights Reserved
Available Formats
PDF or read online from Scribd
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
© All Rights Reserved
Available Formats
Download as PDF or read online from Scribd
0 ratings0% found this document useful (0 votes)
14 views164 pagesAsservissement Numerique Horloge Atomique
Asservissement Numerique Horloge Atomique
Uploaded by
oussamaCopyright:
© All Rights Reserved
Available Formats
Download as PDF or read online from Scribd
You are on page 1of 164
ORSAY
n’ d’ordre:
UNIVERSITE DE PARIS-SUD
CENTRE D'ORSAY
THESE
présentée
Pour obtenir
Le Tite de DOCTEUR en SCIENCE
Ode 1'UNIVERSITE PARIS XI ORSAY
yi te
SUJET: ASSERVISSEMENT NUMERIQUE D'UNE HORLOGE ATOMIQUE A CESIUM
soutenue le 4 MARS 1990 devant Ja commission d'examen
MM, DESAINTFUSCIEN Président-rapporteur
AUBERT
GILBERTAS
LECOY Rapporteur
VIENNET
ABSTRACT
In this thesis we study, from the experimental and theorical point
of view, a digital servo-loop system for atomic clocks.
Our digital set-up has been designed in order to prevent drawbacks
inherent to analog technology. Digital techniques are able to avoid the
occurrence of frequency offsets arising from the defects of the operational
amplifiers used.
In the first part, all the functions needed to slave the frequency
of the quartz to the atomic reference have been realized digitally. We analyse
the properties gf, the different functions _ implemented.
- We to noise ratio for a digital synchronous detector.
mn ion Qbise is negligible compared to the — cesiu
calculate its time constant. in
ents
In the last part of the work,
made on a cesium clock HP S061A option 004 equiped with our digital servo-loop
system.
In conclusion, this study clearly shows that our digital electronic
device is well suited for use with atomic clocks needing a tight servo loop
control monitoring to show their best frequency stability.
REMERCIEMENTS
Je tiens & exprimer ma reconnaissance envers M. DESAINTFUSCIEN, pour
m’avoir accueilli au Laboratoire de I’Horloge Atomique.
Pai eu la chance de travailler sous Ie direction de J. VIENNET
qui a su me faire profiter de sa passion et de sa grande compétence, sur le
plan théorique et expérimental, pour I’électronique des horloges _stomiques.
Je suis heureux de pouvoir lui exprimer toute ma gratitude et mon estime.
Je ie MM, G. LECOY, J. AUBERT, P. GILBERTAS, membres du
x Pexaminer ce travail.
Q
V’appui pthéorique indispensable et
is judicieux long de cet
Mes remerciements vont aussi iit ‘qui
mont apporté leur expérience et leur aide efficaces.
Jury,
Tous les membres du Laboratoire de I’Hotloge Atomique mont
accueilli dans un climat chaleureux et amical. Que tous ceux qui mont
apporté leur soutien, d'une manitre ou d'une autre, en soient tous ici
remetciés.
Remenciemente
Pl
CHAPITRE I: INTRODUCTION
11 GENERALITES ii
12 HORLOGES A CESIUM. Ll
13 MOTIVATIONS DE CETTE ETUDE 12
REFERENCES 13
CHAPITRE I: ICIPES DE L’ASSERVISSEMENT D’UN OSCILLATEUR
SUR LA TRANSITION ATOMIQUE DU CESIUM
iste ws m4 t
IL1 LA REFERENCE ATOMIQUE ikarm ne
IL2 L’OSCILLATEUR A QUARTZ Wy
11.3 ELECTRONIQUE DE GENERATION DU SIGNAL
D'INTERROGATION
14 ELECTRONIQUE D'ASSERVISSEMENT 0-3
14.1 BLOC FONCTIONNEL REPRESENTANT
L’ASSERVISSEMENT
1.4.2. DENSITE SPECTRALE DES FLUCTUATIONS RELATIVES
DE FREQUENCE DU QUARTZ ASSERVI 4
REFERENCES 0-6
Plan
P2
CHAPITRE Il: SYSTEME NUMERIQUE D’ACQUISITION ET DE TRAITEMENT
DE SIGNAL
TIL1 CARTE ELECTRONIQUE
M.1.1 GENERALITES 1
IIL.1.2 SCHEMA SYNOPTIQUE 1-2
11.1.3 ACQUISITION DES DONNEES
1.1.3.1 FILTRE SELECTIF i-3
1.1.3.2. CONVERSION ANALOGIQUE-NUMERIQUE
111.1.3.2.1 GENERALITES
11,1.3.22 PRECISION DU CONVERTISSEUR
10.1.3.2.3 CONVERTISSEUR A GAIN ADAPTATIF In-4
mig.4!
1.1.4.2. GENERATION DU
11L.1.4.2.1_ MISE EN FORME DU SIGN
11L.1.4.2.2 SIGNAL D’INTERRUPTION
IL1.5 PROCESSEUR DE TRAITEMENT DE SIGNAL
1.1.5.1 DESCRIPTION DU PROCESSEUR
1.1.5.2 INTERFACES PROCESSEUR-CONVERTISSEURS 1-7
THL1.5.2.1. INTRODUCTION
11.1.5.2.2. INTERFACE CONVERTISSEUR
ANALOGIQUE-NUMERIQUE
111.1.5.2.3 INTREFACE CONVERTISSEUR
NUMERIQUE-ANALOGIQUE m-9
1.1.6 GENERATION DU SIGNAL DE COMMANDE DU
VARACTOR 1-10
1.1.7 MEMOIRES
Plan
P3
11.2 LOGICIELS DE TRAITEMENT DE SIGNAL
11.2.1. PRESENTATION DU SYSTEME DE DEVELOPPEMENT
1.2.2. PROGRAMMES DEVELOPPES Til
111.2.2.1 CHOIX D'UN LANGAGE
1.2.2.2 CONTROLE DE GAIN ADAPTATIF
10.2.2.2.1 PRINCIPES
10.2.2.2.2 ALGORITHME DU CONTROLE DE GAIN ADAPTATIF I-12
1.2.2.3 DETECTION SYNCHRONE t-14
1.2.2.4 CORRECTEUR NUMERIQUE
DE LA DETECTION SYNCHRONE
: Wi
IV-1
IV.1.1 GENERALITES
IV.1.1.1 MESURE D’UN SIGNAL NO’
IV.1.1.2 DETECTION DE "ZERO"
IV.2. DETECTION SYNCHRONE DIGITALE Iv-4
TV.2.1 INTRODUCTION
IV.2.2 CHOIX D’UN CRITERE POUR LA CONSTRUCTION D'UN
ESTIMATEUR Iv-s
1V.2.2.1 CRITERE BASE SUR L’OPTIMISATION DU GAIN
EN RAPPORT SIGNAL SUR BRUIT Iv-6
1V.22.2 CRITERE BASE SUR LA MINIMISATION DE
L’ERREUR QUADRATIQUE Iv-8
1V.3 COMPORTEMENT DU DETECTEUR VIS A VIS DU BRUIT TV-11
1V.3.1 PUISSANCE DE BRUIT EN SORTIE DU DETECTEUR
1V.3.2. INFLUENCE DU BRUIT BLANC A BANDE LIMITEE
A L’ENTREE DU DETECTEUR Iv-12
1V.3.3. BRUIT FILTRE CENTRE AUTOUR DE LA FREQUENCE
Plan
DE MODULATION Iv-15
IV.3.3. REJECTION DES HARMONIQUES DU SIGNAL DE
MODULATION IV-16
IV.4. COMPARAISON ENTRE LA DEMODULATION CARREE
ET LA DEMODULATION SINUSOIDALE IV-17
1V.4.1 MOTIVATIONS DE L'ETUDE
IV.42 DETECTEUR SYNCHRONE A DEMODULATION CARREE
1V.43 CALCUL DU GAIN EN RAPPORT SIGNAL SUR BRUIT
POUR UNE DEMODULATION CARREE IV-19
1V.4.4 RESULTATS DE LA COMPARAISON
1V.4.4.1 BRUIT BLANC A BANDE LIMITEE
yeaa
1V.44.2 BRUIT BLANC FILTRE
1V.44.3 DETECTION DES HARMONIQI
1V.4.4.4 TABLEAU RESUMANT LES DIFFERENCES ENTRE
DEMODULATION SINUSOIDALE ET
LA DEMODULATION CARREE Tv-23
IV.5 CARACTERISATION DU DETECTEUR SYNCHRONE
NUMERIQUE AVEC LE FORMALISME DE LAPLACE
IV.5.1 DEMODULATION SINUSOIDALE
1V.5.2, DEMODULATION CARREE IV-26
REFERENCES IV-28
CHAPITRE V: ANALYSE DE LA BOUCLE D’ASSERVISSEMENT
V.1. CARACTERISTIQUES DU SIGNAL D'ERREUR €"(t) Vel
Plan
PS
V.2. RETARD INTRODUIT PAR LA DETECTION SYNCHRONE
V3. REPRESENTATION FONCTIONNELLE DE L'ASSERVISSEMENT V-2
¥V.4. FONCTION DE TRANSFERT DE L’ASSERVISSEMENT
V.4.1 CAS GENERAL
V.4.2 FILTRE NUMERIQUE CORRECTEUR D'ORDRE 2 V-3
VA3 STABILITE DE LA BOUCLE D’ASSERVISSEMENT v-4
V.5 QUANTIFICATION DES COEFFICIENTS DU FILTRE CORRECTEURV-5
V.6 EFFET DU BRUIT DE QUANTIFICATION V-6
V.6.1 INTRODMGTION
D'ERREUR DE
V.63.2 CARACTERISTIQUES DU
L’ASSERVISSEMENT |
V.63.3 ETUDE DU BRUIT DE QUANTIFICATION v-10
V.6.3.3.1 ETUDE THEORIQUE DE LA DENSITE SPECTRALE DE
PUISSANCE DU BRUIT DE QUANTIFICATION
6.3.3.2 ETUDE NUMERIQUE DE LA DENSITE SPECTRALE DE
DE PUISSANCE DU BRUIT DE QUANTIFICATION V-11
V.6.3.3.3 LIMITE DE LA STABILITE DE L’HORLOGE
IMPOSEE PAR LE BRUIT DE QUANTIFICATION V-13
v.64 TRONCATURE DES RESULTATS DES OPERATIONS V-14
V.6.4.1 PRESENTATION DU PROBLEME
V.6.4.2. EFFET DU BRUIT DE TRONCATURE SUR LA
STABILITE DES HORLOGES V-15
REFERENCES V-16
Plan
P-6
CHAPITRE VI: MESURES EXPERIMENTALES
VII VERIFICATION EXPERIMENTALE DES PROPRIETES
DU DETECTEUR SYNCHRONE NUMERIQUE VI-1
VI.1.1 MESURES CONCERNANT LA TENSION D'OFFSET DE LA
SORTIE DU DETECTEUR SYNCHRONE NUMERIQUE
VII. METHODE DE MESURE DIRECTE
VL1.1.1.1 DESCRIPTION DU DISPOSITIF EXPERIMENTAL
VIL1.1.1.2, RESULTAT DES MESURES ‘VI-2
VL1.1.2 METHODE DE MESURE INDIRECTE:
MESURE DU DECALAGE DE FREQUENCE DU
QUARTZ ASSERVIEN FONCTION DE LA
[ANTE DE TEMPS DE L’ASSERVISSEMENT VI-3
VI-4
A \ R VES
LY RMONIQUE sites
V2. CARACTERISATION DE LA STAB!
A CESIUM ASSERVIE NUMERI
‘V1L2.1_ DESCRIPTION DU BANC DE MESURE
‘VL2.2. STABILITE DE FREQUENCE OBTENUE
VIL3 TENUE EN TEMPERATURE DE LA CARTE ELECTRONIQUE VI-7
CONCLUSION Ci
ANNEXES
1 ERREUR D’ESTIMATION DU SIGANL DUE AU DEPHASAGE ENTRE
LE SIGNAL DE MODULATION: ET DE DEMODULATION Al
Plan
PT
EXEMPLE DE PROGRAMME D’ACQUISITION D'UN ECHANTILLON = A-2
GAIN EN RAPPORT SIGNAL SUR BRUIT DANS LE CAS D'UN
BRUIT BLANC FILTRE. DEMODULATION SINUSOIDALE A3
COMPORTEMENT DU DETECTEUR AVEC LES HARMONIQUES
DU SIGNAL. DEMODULATION SINUSOIDALE AS
COMPORTEMENT DU DETECTEUR AVEC LES HARMONIQUES
DU SIGNAL. DEMODULATION CARREE. AT
COMPARAISON ENTRE LA DEMODUALTION SINUSOIDALE ET CARREE
AB
cas _D" BLANC A BANDE LIMITEE AVEC — >> 1 Ald
y 0 | :
A RIQUE
‘AVEC LE FORMALISME DI ari
CALCUL DU BRUIT DE QUANTIFICA’ 5 “17
Plan
CHAPITRE I
INTRODUCTION
L1 GENERALITES
Le tableau ci-dessous montre les sept unités de base retenues par le
Systéme International d’Unités avec indication de Ja précision de leur
réalisation actuellement atteignable.
Le kelvin 107°
La mole 108
WW ons La candela 10°
ee all mitt
froppante, De ce fait, la mesure du
importance toute particulitre dans la méwologie modeme.
réalisation de V'unité de longueur (mée) et celle de Yoni de situa
de potentiel (volt ) font appel A des mesures de fréquence [1].
Il existe & Vheure actuelle toute une gamme d’étalons de fréquence
industriels ou encore 4 I’état de prototype dans divers laboratoires qui se
Gifférencient les uns des autres par leur stabilité en fréquence. La figure 1
représente les diverses. performances des références de fréquence —_actuels
[2113].
12 HORLOGES A CESIUM
Lihorloge A césium qui n’est pas la plus stable, mais qui reste &
Theure actuelle la plus exacte sert a la définition de la seconde. Elle
Introduction
Fig 4 stabilité de fréquence des références actuelles
quarz de précision
rubidium standard
rubidium f.
Misti
maser H actif
eésium performant
jon mercure
maser H passif
10? ict 102-103 = 104 = 10510830
temps de mesure en secondes
12
posstde da fait de son industrialisation le plus grand nombre d’utilisateurs.
La technique utilisge jusqu’a ces demitres années pour la sélection
aéat des atomes de césium consiste a réaliser un tri magnétique de ceux-i.
Cette technique qui est & la base de tous Jes modéles industriels d’horloge
n'est plus guéze susceptible d'innovations importantes.
La technique du pompage optique des atomes d’un jet a été propost
d&s 1950 par le professeur A.KASTLER et a donné lieu ces demitres années 2
diverses réalisations en taboratoire. Les résultats obtenus sont prometteurs
a’un gain intéressant on stabilité de fréquence & court et & moyen tenme
(4I15]6).
o
13.
cy
‘horloge & pompage
srre ETUp
de stabilité
ui
type d’électronique —_d’asservissement
i ium
fonctionnent avec une _—électronique —_dasservissement fa Les
transition atomique. Actuellement, la
imperfections et les limitations dues aux éléments analogiques elles que la
dérive de offset de Vintégrateur et 1a démodulation imparfaite du signal
G’erreur sont pratiquement incompatibles avec les nouvelles exigences _impostes
par le tube césium pompé optiquement (7) [8].
Nous avons donc étudié et réalisé un systtme électronique utilisant
Jes techniques numériques devant permettre de répondre aux nouveaux besoins.
Cette these écrit ce systtme, -montre ses. avantages, et indique ses
performances.
13
REFERENCES
1 ©. PILLER P. KOCH Importance des mesures de temps et de fréquence en
métrologie. Proceedings Second European Frequency and Time Forum 1988,
Neuchatel (SWITZERLAND), pp 3-12.
2 R BESSON Rf local oscillator for future frequency standards. Proceeding
of the IV" Symposium on Metrology and Frequency Standards, Ancona
(ITALY),1988, pp 157-161.
3 °C. AUDOIN x*™ Joumées BNM "“Temps-Fréquence", Bulletin du BNM,
‘63-64, vol. 1, Avril 1986, pp 19-26.
4y . BALD, P. CEREZ, C. AUDOIN, et V. CANDELIEF
"Temps-Fréquence”, Besangon, 1987,
5 V. GIORDANO Thise de Docter Gabler ne
ur
Orsay, 1987, Caractéristiques du sign
A jet de césium pompé optiquement par diodes laser.
6 A. HAMEL These de Docteur en Sciences, Université Paris XI, Orsay, 1989.
Propriétés d'un résonateur atomique A jet de oésium pompé optiquement et a
structure de champ longitudinale.
7 C.AUDOIN A point of view on the accuracy performances and on the
Prospects of improvement of primary cesium beam frequency
standards.Proceedings of the IV" on Metrology and Frequency Standards,
‘Ancona, ITALY, September 1988, pp 46-51.
8 A.de MARCHI The accuracy of commercial cesium beam frequency
standards.Proceedings of the IV" on Metrology and Frequency Standards,
Ancona, ITALY, September 1988, pp 52-56.
Sntnoduction
Te
CHAPITRE 11
PRINCIPES DE L’ASSERVISSEMENT D’UN OSCILLATEUR A
QUARTZ SUR LA TRANSITION ATOMIQUE DU CESIUM
I BREVE DESCRIPTION D’UNE HORLOGE A CESIUM
L’éalon atomique utilisant un jet de cfsium est un étalon de
fréquence passif essentiellement composé de quatre dispositifs physiques:
<1 La référence atomique de fréquence.
2 Lioseillteur 2. gpartz.
3 14 i
me permettant de générer Je signal "interrogation de
Gignat détivré par te quartz,
qurz sur la sat
ILI LA REFERENCE ATOMIQUE ka rh fl
On sait que dans certaines conditions, un astome se touvant A un
niveau d’énergie B, peut transiter vers un niveau d'énergie E, en émetiant ov
en absorbant une onde électromagnétique de fréquence v et d’énergie hv (h est
la constante de Planck ) correspondant & V'écart d’énergie existant entre les
nivesux E, et E, Tous les ualons atomiques de fréquence fonctionnent &
partir de ce principe,
Nous nous intéressons & T'étalon a jet de césium qui est
cessentiellement composé de ( Voir Figure I.t.a ) [1]:
= Un four pour Ia création du jet de césium,
- Deux aimants A et B pour Ia sélection d’état des atomes.
= Une cavité résonnante de Ramsey.
= Un détecteur a fil chaud.
Quand on fait varier la fréquence v du signal injecté dans la cavité
Pnincipes de Uarseusiccement d'une hartage cesium
Microwave input
Magnet® Cetector
/ 4 :
Schéma d’un tube césium (a) et ri i
sa courbe de réponse en fréquence (b).
Figure JL
0-2
‘micro-onde, ’intensité 1 du jet arrivant au détecteur varie aussi, La courbe
relatant les variations de I en fonction de v est tragée sur Ja figure IL1b
[1]. Elle présente une fréquence de résonance », égale & 9 192 631 770 Hz.
En pratique, Ia précision du pointé de la résonance micro-onde est limitée par
le bruit de grenaitle do jet arrivant au détecteur, C'est un bruit équivalent
A un bruit blanc de fréquence de la référence atomique. Sa densité spectrale
Sy, en terme de fluctuations relatives de fréquence est
Sy (O= bh, hy étant une constants.
IL2 L’OSCILLATEUR A QUARTZ
‘4 A quartz est un oscillateur électronique dont ‘Ie
hie
ernes (électronique
vibration, champ magnétique, etc ) i i s r
Les mesures expérimentales de i fréquence
montrent que la densité spectrale des fluctuations relatives de fréquence,
Syp d'un oscillateur & quartz est représentée par Ta relation suivante:
“1
8,0 = bf vhf ene
oth, hy, h, sont des constantes.
IL3 ELECTRONIQUE DE GENERATION DU SIGNAL D’INTERROGATION
Différents systémes sont utilis¢s pour générer ce signal. Ils sont
pratiquement équivalents. Nous allons déctire A titre d’exemple celui qui est
utilisé dans notre horloge d’expérimentation HP S061A de fabrication Hewlett
Packard.
Le signal 10 Mhz issu de V'oscillateur & quartz, modulé en phase par
Principes de Uassensiasement d'une hartage cesium
1-3
un signal sinusoidal & la fréquence 137 Hz, est tout d'abord multiplié par 9 &
Taide d'un multiplicateur de fréquence classique, jusqu’d Ja fréquence de
90 Mhz, Un générateur d*harmoniques utilise ce signal & 90 Mhz et un signal 2
12.63..Mhz, obtenu par synthése de fréquence A partir de Voscillateur
quartz & 10 Mhz, pour produire le signal A la fréquence 9192.63. Mhz modulé
en phase a 137 Hz nécessaire pour I'intetrogation de la resonance micro-onde.
Le bloc-diagramme simplifié de ce systtme est représenté sur In figure 112
By.
La stabilité et exactitude de Whorloge & césium dépendent bien
entendy des qualités spectrales du signal d’interrogation, Ce probleme
indépendant de I'étude décrite dans cette thise ne sera pas abordé i
références [4] [5] ppitent avec: présision de ce sujet.
es
Le signal d’erreur util
par détection synchrone du signal de
césium. Dans le cas de I'horloge HP 5061 prise comme
‘modulation appliquée au détecteur est de 137 Hz Le signal @erreur est
ensuite filtré puis intégré. Le signal obtem & la sortic est enfin appliqué
au varactor de oscillateur & quartz pour corriger sa fréquence. Le
schéma-bloc de cet asservissement est représenté sur la figure T.3.
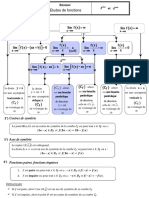
IL4.1 BLOC FONCTIONNEL REPRESENTANT L’ASSERVISSEMENT
Le schéma fonctionnel de I’asservissement en fréquence du quartz sur
la aie de transition atomique est représenté sur la figure IL4. L"équation
qui régit Je fonctionnement de cette boucle d'asservissement est:
2.
© c
a =— +
Fon 14+€ S77.
(IL) 00 C = nKK, F
F est un filtre passe-bas comportant au moins un intégrateur de fagon 2
annuler le signal d’erreur d’asservissement en régime établi.
Principea de Uacoewissement d'une hortage ceaium
90 Mhz +
137HzMOD
9192.63... Mhz +
(137 Hz MOD )
FIG IL.2 BLOC DIAGRAMMME SIMPLIFIE
DE LA SYNTHESE DE FREQUENCE
[aT caine atasservissement
[[ } Chaine d'interrogation
Fig 1.3 SCHEMA-BLOC DE L'ASSERVISSEMENT
D'UNE HORLOGE CESIUM
Q, ; Muctuation de fréquence de la référence atomique
1: fluctuation de fréquence du quartz libre
fluctuation de fréquence du quartz asservi
: constante de conversion fréquence-tension
constante de conversion tension-fréquence
: rapport fréquence atomique sur fréquence quartz
Filtre passe-bas comportant au moins un intégrateur
BLOC FONCTIONNEL DE
i Stake
anna
Pa
a 7L,k#
10°77
10°?
10
(Af 4
x05
10° “= = 2 3
we 10" 10 1 10 10° 10
f (Hz)
Figure 11.S Densité spectrale des fluctuations relatives de fréquence
du quartz asservi avec une boucle d'asservissement
composé d'un intégrateur simple. Les courbes 4 et S
correspondent a=! s et +=10 s,respectivement.
A titre de comparatson, Ia ligne en pointillés représente
Sy, tandis que la courbe en trait plein est la
représentation asymptotique de Syc.
m4
1.4.2 DENSITE SPECTRALE DES FLUCTUATIONS RELATIVES
DE FREQUENCE DU QUARTZ ASSERVI
Soient y, y, et y, les fluctuations relatives de fréquences du quartz
asservi, du quartz libre et de Ia référence atomique respectivement. On a:
AQ, 4a, 49,
od Q, est Ja fréquence nominale du quartz
‘AO, représemte les fluctuations de fréquence do quartz asservi
AQ “ . de la référence atomique
iY One) "du quartz libre
On sait que équation (11.1) Jatives
de fréquence. On en déduit —— la aon suivante qui lie
es différentes densités spectrales de fluctuations de fréquence.
s 1 re %
s, =$8, ——+ +58, ——> avec 7 =
Ye % 1+ Pe Mit ra nk X,
od les sy désignent les densités spectrales des fluctuations relatives de
fréquence et est la pulsation de Fourier.
On a représenté sur Ia figure ILS [6] la densité specurale des
fluctuations relatives de fréquence du quartz libre, de la référence atomique
et du quartz asservi, respectivement. Ces courbes ont &é tacées avec les
valeurs numériques suivantes qui correspondent au cas pratique:
as
®@=— +8107 F +8107 fH")
% f
Principes de Uassersissement d'une hantoge ceaium
1s
Sy 14 107 [Hz
. A
od Sy, et Sy, sont exprimés en Hz
Cette émde és simple montre que 'asservissement permet de wansférer Ia
stabilité de fréquence a long terme de la référence atomique sur T'oscillateur
quartz, L'éude détaillée de I'asservissement que nous avons réalisé est
décrite dans le chapitre V de cette these.
ys!
Principes de Uaosersissement d'une hantoge cealum
m6
REFERENCES
1 J.VANIER and C.AUDOIN The quantum physics of atomic frequency standards.
Adam Hilger, Bristol,1989. Vol 2, p 614.
2 RBESSON Les oscillateurs & quartz, Extrait de Bulletin du bureau national
de métrologie. Janv-Avril 1986. Spécial _temps-fréquences. N° 63-64, Vol 1,
pp 27-33.
3 Documentation technique de I"horloge HP S061A, Page 4-2.
4 Rapport final da contrat "Etude et réalisation de syst¥mes électroniques
associés 8 hhorloges atomique” (Document interne), Responsable
the frequency stability
ive frequency sion El
Messurements, june 11-14 1990,
6 IJNANIER and C.AUDOIN The quantum physics sy standards.
Adam Hilger, Bristol, 1989. Vol 2, pp 779-780.
Principes de Uaasewlacenent d'une hortage cesium
CHAPITRE 0
SYSTEME NUMERIQUE D’ACQUISITION ET DE TRAITEMENT DE SIGNAL
MILI CARTE ELECTRONIQUE
11.1.1 GENERALITES
Les raisons qui nous ont amenés & choisir la technologie digitale
ont été défi Evoquées au chapitre I, Pour pouvoir réaliser I’asservissement
de ti quartz a sateen atomique, la carte électronique
fectuer synchrone, Ia fonction filtrage, et
hoe de Yesllaeur 8 quar
En
une stabilité weave
Vordre de 10"? sur une seconde,
Pour illusmer_Vordre de grandeur de = la_—précision —requise pour
Vasservissement, il faut savoir que sur une horloge a césium HP 5061 option
004, un écart de 1 mV sur la tension de varactor entraine une variation de
fréquence relative de 10°!’ sur Voscillateur & quartz, L’amplitade du bruit 2
Ia sortie de notre sysitme doit done éte tés inférieure & 100 HV.
Par conséquent, és Ia phase de conception, nous avons pris toutes
les précautions qui permettent d’éliminer autant que possible toute source
parasite de bruit, Une attention particuliére a 16 accordée aux problémes de
compatibilité electro-magnétique afin de réduire le plancher de bruit de la
carte:
= Placement des composants: Tl a &é nécessaire d’isoler les composants
directement és aux entrées et sorties des signaux (_convertisseurs
analogique-numérique et numérique-analogique ) des _composants _logiques
bruyants par des plans de masse soigneusement placés,
Pysteme Numenique dequivition et Inaitement de fignak
W-2
~ Filtrage sévére de toutes Jes tensions d’alimentations
1IL1.2 SCHEMA SYNOPTIQUE
La carte électronique est composée des sous-ensembles suivants:
= Acquisition des données
Un filtre anslogique passe-bande permet d’améliorer le rapport signal sur
brit & entrée du convertisseur et sert de file anti-repliement —tandis
que la numérisation du signal est assurée = par_‘Ie convertisseur
analogique-numérique
= Interface convertisseur-microprocesseur
3g Processeur de commander correctement Je convertisseur
carte.
= Systtme de gestion des interruptions
Tl assure le cadencement des ordres d’échantillonnage.
= Convertisseur digital-analogique et amplificateur de sortie
Le signal numérique est restitué sous. Ia forme —analogique par
Vintermédiaire d'un — convertisseur numérique-analogique © suivi. = d'un
amplificateur de sortie et d'un filtre de lissage.
La figure Il montre les différents blocs électroniques avec Ses
interconnexions existantes. Chaque bloc exécute une tiche bien déterminge qui
sera précisée dans les chapitres suivants.
ILL1.3 ACQUISITION DES DONNEES
Crest la partie Ia plus délicate car Vefficacité du traitement de
signal est fortement comélée & la précision de ce syste. Le schéma
Giectronique est représenté sur In figure «“M.2. Cette. fonction est
Pysteme Numenique dcquisition et Tnaitement de ¥ignat
T'ITI ofa
m3
essentiellement assumée par deux composants:
= Le fille sélectif
= Le convertisseur analogique-numérique
11.3.1 FILTRE SELECTIF
Le filtre sélectif de fabrication DATEL FLI-UR2BA1 est réalisé en
technologie hybride (composant UI3 sur la figure 11.2). Tl est. de type
Butterworth d’ordre 2 et sa fonction de transfert est représenté sur la figure
11.2.1. Il a une pente asymptotique d’atténuation de -40 dB par decade autour
de sa_fréquence centrale. © Les quatre ~—«potentiométres.-( composants
R25, R26, R27, RIB sur Ja figure UL2) permeteent d'ajuster cere fréquence
centrale, Son Glectronique de cablage interme est représemté parla
A re AS cor et
La précision de In conversion analogique- mitée par
Je pas de quantification. Dans la grande majorité des convertisseurs, ce pas
est constant quelle que soit V'amplitude du signal; La quantification est
uniforme. Ce bruit de quantification ( Voir chapitre BRUIT DE QUANTIFICATION }
dépend de deux parametres:
1 Le pas de quantification du convertisseur.
2 La densité de probabilité du signal.
IL.1.3.2.2 PRECISION DU CONVERTISSEUR
‘L’amplitude du signal a échantillonner est comprise entre +5 V. Dans
Je cas de 'vtilisation d'un convertisseur 12 bits avec une plage de
conversion de 45 V, nous avons un pas de quantification de 244 mV. C'est la
limite de ln précision du convertisseur. Si Ion veut augmenter cette
précision, il faut soit choisir un convertisseur ayant un nombre de bits plus
Gievé, dans T'exemple ¢voqué-ci-dessus, un convertisseur 16 bits nous
Yyoteme Numenique Acquisition et Inaitement de Yignat
FIG 1.2.1
FLJ-UR28A1/2 Bandpass Filter Frequency Response
[TTT
CA
|
Amplitude [dBi
4
3
aH
Gaikarnt
FLJ-UR2BA1/2 Block Diagram (Fig. 8) FG 111.2.2
Cf in each fur is 10000 pF for suffix 1 model and 1000 pF
for suffix 2 m
guvext
11-4
permetirait d’atteindre une précision de 0.15 mV, soit utiliser un sysitme de
quantification non uniforme. C'est cette demni#re solution que nous avons
adoptée en plagant un amplificateur A gain variable avant Je convertisseur.
00L.1.3.2.3 CONVERTISSEUR A GAIN ADAPTATIF
10L.1.3.2.3.1 JUSTIFICATIONS
Replagons nous dans le cas d'un convertisseur 12 bits. Quand
Voscillateur & quartz n'est pas asservi, a tension du signal d'erreur est
de Vordre du volt. L’erreur relative du convertisseur est alors sensiblement
égale & 2441073. Par contre, quand osciliateur est asservi, In tension
moyenne du sij d’erreur est nulle et ses fluctuations restent inférieures
a 1) illivolts. Q Alors, erreur relative du convertisseur
adaptée au probléme de I’asservissement.
11L.1.3.2.3.2 CONTROLE DE GAIN ADAPTATIF
Nous avons choisi une solution relativement simple qui consiste &
ajuster le pas de quantification en fonction de amplitude du signal. Pour
cela, nous utilisons un convertisseur & gain programmable par logiciel.
Notre choix s'est porté sur Ie circuit HS9414 HYBRID SYSTEMS
(composant U12 sur Ia figure TIL2) réalisé en technologie hybride. C'est. un
convertisseur analogique-numérique 12-bits permettant d’obtenir une dynamique
de 126 dB & Taide d'un ampli A quatre valeurs de gain programmables. 1
comporte en outre 1'échantillonneur-bloqueur. La durée de conversion est
denviron 30 US. On peut voir le diagramme fonctionnel de ce composant sur
la Figure Il. ( Document Hybrid Systems p.1 ).
La fonction de Contréle de Gain du convertisseur est commandée par
Yyoteme Numenrique Acquisition et Tnaitement de Fignat
DOC HYBRID SYSTEMS P. 1
Deana
DESCRIPTION .
The HS 9414 provides complete 12-bit data acquisition
fecctonalty in 2 é0-pn DIP. The HS S414 mchone a
Schannel diferental input mutticiexer, a sofware Pro-
grammable instrumentation ampitier,a sample anc howd
Seeuil and the HS 574A, 12-bt, 25 wsec AID convener
Specifications are guaranteed for the compreie systemin,
stead of for each individual component
FEATURES BENEFITS
EY mux, inst. AMP, sit, AID in T saves Board Real Estate
pe * Compact 40-Pin Di
= digitally Programmable Gains
of 1, 10. 100, 500,
Dsare oureor
-Hyor9 Systems 1987
ms
Je microprocesseur( Voir Paragraphe 1.2.2.2
IIL.L4 SYSTEME DE GESTION DES INTERRUPTIONS
1114.1 PRESENTATION DU PROBLEME,
Le schéma électronique du bloc interruption est représenté sur la
figure TIL3. On peut montrer qu'une mauvaise synchronisation entrainerait un
bisis dans estimation de I’amplitude du signal (voir ANNEXE 1). I est
donc essentiel d'assurer un synchronisme parfait entre le signal et I'horloge
¢échantillonnage.
de gestion des interruptions permet au _processeur
Le
d’échangl er signal exactement aux instants d’échantillonnage —_définis
1.1.4.2. MISE EN FORME DU nah rmtié
Le signal triangulaire de référence est foumni par le circuit de
modulation de Vhorloge HP S061. Nous constatons deux choses: Premitrement, sa
pente au voisinage de 2éro est irés faible; deuxitmement, il est en avance de
phase par rapport au signal a détecter (FIG 11,31), Nows avons done
procédé a une mise en forme de fagon & I'exploiter correctement.
Un amplificateur opérationnel a faible bruit OPO7 ( Composant U3. sur
la figure 1113 ), d’impédance d’entrée levée (30 KM), momé en inverscur,
sert d’étage disolation.
Ensuite, In sortie de —‘T'amplificateur opérationnelattaque un
comperateur _LM710 (composant U6 sur la fig. IIL3) monté en wigger. On
obtient ainsi des fronts de montée bien raides (FIG 111.32 ).
Pour parachever cette misc en forme, un monostable LS123 TEXAS
Pysteme Numerique dcquisition et Inaitement de Fignat
I \
fie T1L3.2 Signal dg sortie da comparater LM710
I
1 1
Sv
OV
& sortie du monosjable U4B
"Gahkarmuntt
FIG I3.4 Signal d'interruption ( morlostable U4A)
ov
I
1
1
Signal al tube oésium HP
‘
CHRONOGRAMME DES SIGNAUX DE
SYNCHRONISATION POUR
L'ECHANTILLONNAGE DU SIGNAL
T-6
INSTRUMENTS ( composant U4B sur la fig. HL3) retarde Ia sortie du trigger
pour obtenir une — synchronisation sur le_— signal, «= @_~—‘échantillonner
(FIG 11.3.3 ). Nous avons vérifié que le “Jitter de phase” apporté par ce
monostable est de Iordre de la micro-seconde donc négligeable. En fait, c'est
Je front de descente de la sortie de ce mionostable qui est synchronisé sur le
premier échantitlon du signal & détecter.
101.1.4.2.2 SIGNAL D’INTERRUPTION
La sortie Q du monostable U4B (référence sur ia fig. IIL3 )attaque
ensuite le monostable U4A ( référence sur Ia fig. IL3 )qui va générer le
signal d'interruption (Fig 10.34), La largeur de Vimpulsion doit @re au
moins temps d’exécution d'une instruction élémentaire du
mi 10 qui vaut_200 ns. Nous l'avons fixé a 300 ns, L’erreur
égale
t A fait négligeable.
vauly of
TIL1.5.1 DESCRIPTION DU PROCESSEU! ari fl
Toutes les opérations de traitement de signal sont exéoutées par un
processeur spécialisé ( Digital Signal Processor ) TMS32010 TEXAS INSTRUMENTS
pilové par un quartz a 20Mhz Le schéma de cablige électronique est
représenté par Ja figure IIL¢. Le temps d’exécution "une instruction
Gémentaire est de 200 ns. Le langage de programmation ( Assembleur ) est
adapté au filtrage numérique { 1 ).
Liarchitecture du TMS320 est du type Harvard, c’esta-dire que les
mémoires de programme et de données sont séparées, ce qui permet un gain de
vitesse par rapport aux structures habituelles des microprocesseurs. De plus,
tune modification est faite, par rapport & une architecture Harvard classique,
de fagon & permettre des échanges entre les espaces de mémoire programme et
données. De ce fait, utilisation du microprocesseur est plus facile, Le
figure 114.1 représente I'architecture du TMS32010.
Yyoteme Numenique. dequisition et Traitement de fignat
FIG III.4
FIG 11.4.1
REMARQUE:
Pour des raisons de commodité de cfblage électronique, les douze
pins du convertisseur analogique-numérique DAN[O.11] véhiculant le signal
numérisé sont reliés an bus des données de poids faible du processeur D{0..11]
tandis que les douze pins du convertisseur numérique-analogique | DNA[0..11]
recevant le signal numérisé sont reliés au bus des données de poids fort du
processeur D[4..15] ( Voir figure IIL4 ).
TUL1.5.2 INTERFACES PROCESSEUR-CONVERTISSEURS
11L.1.5.2.1 INTRODUCTION
Le edu convertisseur analogique-numérique par le processeur
cai
in cAblage direct. Il est donc nécessaire de placer
ions suivantes:
le sscur et le compos
‘ériphérique. @
2 Simplifier les _protocoles
‘il
processeur de garder un controle
L1.5.2.2 INTERFACE CONVERTISEUR ANALOGIQUE-NUMERIQUE
La réalisation repose sur un usage judicieux des fonctions d’entrée
et de sonic du processeur. Le but est de pouvoir acquérir le signal a des
instants bien prégis avec un minimum d’instructions logicielles, Le TMS32010
permet & Taide des trois lignes d’adresses (AO, Al, A2) In possibilité de
communiquer avec huit périphériques. Nous n’en utilisons que deux. Les lignes
‘AO et Al sont respectivement utilisés pour adressage des _convertisseurs
analogique-numérique et numérique-analogique.
Le schéma électronique de [interface TMS-HS est représemté sur la
figure LS. L’organigramme de I’acquisition d’un échantillon est _représenté
sur la figure IS.1. Avant d’échantillonner, il faut configurer le
convertisseur selon entrée: ct le gain choisis ( Voir le Document HYBRID
SYSTEMS p.l et p.2 sur les figures Ia et b). Le chronogramme des signaux
Yysteme Numenique dequisitlon et Tnaitement de Fignat
ENVOI ORDRE DE CONVERSION
Si CONVERSION
FINIE?
LECTURE ECHANTILLON
(
Q :
sa EL ahica
30 DBE DBS DB10 D811 B15
(138) (58)
X=tNDETERMINE
MAO, MAT, GAO, GAl= MOT DE CONFIGURATION
DBO..DB15 est le bus de données du DSP
FIG ILS.2 COMPOSITION DU MOT DE CONFIGURATION
m8
de commande du convertisseur HS9414 est indiqué sur la figure Ula extraite
de ln DOC HYBRID SYSTEMS. Pour cela, on envoie au convertisseur un mot de 16
bits dont la composition est donnée en figure 11.5.2.
Le tbleau gi-dessous donne Je mot de configuration, MCONFIG, du
convertisseur selon Hentrée et le gain choisis. MCONFIG est un mot de 16 bits
cen représentation hexadécimale,
GAINS GAIN=1 GAIN=10 GAIN=100 GAIN=500
ENTREES
EET
0 ‘XOXX KAXX X8XX XCXX
o
q XSXX X9XX XDXX
2 X2KX
3 X3XX XTXX XBXX XFXX
———_—
X représente une valeur non significative.
Si AMCONFIG est Madresse de la mémoire RAM contenant MCONFIG, I'instruction
assembleur qui permet de configurer le convertisseur et d’effectuer un
échantillonnage est: .
OUT AMCONKFIG,PA6
Exemple: Si on veut échantillonner T'entrée du convertisseur amplifiée
préalablement avec un gain de 100, MOONFIG est alors égale 2 XAXX.
interface détecte Venvoi de ce mot puis ordonne une conversion en
Yyoteme Numerique Acquloltion et Traitement de ignat
DOC HYBRID SYSTEMS P.2
ABSOLUTE MAXIMUM RATINGS
Voc laDatsiCemmen ofo “1650
Veet OaiatConman om -165¥
\ocic Gaia Cemen 10 =v
Anseg Common to © gta Comnen Wy
Convo rou GE ES Ay 128 30 ER
‘Had. Mat. GAO. Gane 09 -08vo\sogie “08
-Anaon hous EEN BP CFE SHOCHDIS
‘raag Gammon sev
Ino Ot Agus? a8 10 vee
REF OUTioAnsoge: Ogi G2 regina sre creo
' =Vop Sco ms ert ret
Votage on pia vous 9 To Sare Moo nyeg “08 mae
Lena Temperate, Sooeng 300°C. 1Oaee
APPLICATIONS INFORMATION
AID CONTROL FUNCTIONS
‘The HS 9414 contains all control functions necessary
to provide for complete microprocessor interface and
also ‘stand alone’ operation including continuous con-
versions, All A/D contro! functions are defined in Table
‘and Table 2,
FoneTON
DEFRTION
Table 1. Detinng A/D Contre! Functions
‘SPGIA CONTROL FUNCTIONS
The HS 9414 has a 4-Bit transparent latch that selects
input MUX channel as well as Gam, The SPGIA control
functions are cetined in Table 3.
Tae Tero Faeroe
tater | Mux Gan | 1 espe enn mux 8 Gan
coer 2 F magmas Mune Gon
3 an iieneamoce
2 Yow svarmoaren moe
TAT RG | TOR ewe] Seer pu MUX Crane
GAT GH | Gan Aamrese
°
2
s3
Table 2, Defining ine SPGIA Conto! Functions
TIMING
The ting agra ae shown Fg Note thet
to start a conversion RIC must have an
‘overlap time of 120 nS mit imum CSand RIC may be
advanced or delayed if needed (by the application) by
ivan for this — only the coin:
‘be met. Typically RIC is u
‘yp, 20.38 4.8 max including setup, conversion tne
and access time.
Sarre RTS meecreaen—]
@ [ac | ws Ta |
op ere
2. i x 2 Irwaves 12-84 Convertor
Ce 1 _[ imraies 6B Comeson |
a
Te [rs 8 Conon
oF z
° F
£ [1 _Lstema ieee
POS | yrpenmn me Get
6 Neescormenaea ta mean
Table 2, HS 0414 A/D Section Truth Tabve
FIG
Hib
uL9
activant la ligne Read/Convert du convertisseur. Cela veut dire que chaque
fois que Von enverra un mot de configuration au convertisseur, un
échantillonnage du signal. suivi_ d'une conversion —_analogique-numérique est
automatiquement activé. Quand la conversion est terminée, cc qui correspond 2
tun niveau logique bas sur Ia ligne STATUS du convertisseur, le processeur en
est averti par Iintermédiaire de sa ligne BIOZ, M seit alors que Je signal
numérisé est disponible sur le bus de données, Tl ne Ini reste plus qu’a
cffectuer une opération de lecture dont instruction en assembleur est 1a
suivante:
IN AECHAN,PA6
AECHAN est I'adresse de la mémoire qui stockera le signal échantillonné et PAG
Je port d'entrée correspondant au convertisseur A/N.
et fivnct d'acquisition d’un échantillon est donné en
10L.1.5.2.3 INTERFACE CONVER’
‘Aucune interfage n'est requise car le compos jert pas une
configuration préalable. Tl suffit de relier directement le convertisseur au
processeur, La ligne d’activation ( Chip Select) du convertisseur est.
connectée & Ia ligne Al du bus d’adressage. La conversion est immédiatement
exéeutée quand le processear Iui envoie le mot de 12 bits représentant Ia
valeur du signal numérisé. IL suffit d'une seule instruction assembleur pour
effectuer cette opération:
OUT AECHNA,PAS
AECHNA est I'Adresse de YECHantilion Numérisé & convertir en Analogique
et PAS Je port de sortie correspondant au convertisseur N/A.
Yyateme Numenique Acquisition et Inaitement de Fignal
m-10
IL1.6 GENERATION DU SIGNAL DE COMMANDE DU VARACTOR
Le schéma électronique est représenté sur la figure UL6. Le signal
de commande numérique généré par le processeur est converti_ en signal
analogique par V'intermédiaire du convertisseur numérique-analogique 12 bits
ADS567 ANALOG DEVICES.
Le systtme effectue une conection de Ia tension du varactor toutes
les 7.3 ms, puis In maintient constanteentretemps. Chaque correction
entraine donc un saut de tension qui est intégré par un filtre de lissage afin
de ne pas perturber la stabilité & court terme de I’horloge.
Un amplificateur opérationnel O27 ( composant UO sur la
i passe-bas RC (composants R17 et C13 sur la
lissage. En pratique, des valeurs de Ry
HBO) ba nce
4 afttiil
Les programmes de traitement sont contenus dans deux Eprom rapides
27CX641 construites par INTERNATIONAL CMOS TECHNOLOGY qui ont un temps d’accts
de 45 nS. Cheque boitier a une capacité de 8 Kmots de 8 bits, La figure U7
représente le schéma électronique de cablage des mémoires. On a représenté sur
la figure T1L.7.1 le plan d’implantation de tous les programmes utilisés,
dans la fonction
d’asservissement.
MILL? MEMOIRES
Ii.2 LOGICIELS DE TRAITEMENT DE SIGNAL
1IL2.1 PRESENTATION DU SYSTEME DE DEVELOPPEMENT
Bien sir, Ia mise au point d’une carte électronique d'une telle
complexité n'est pas envisageable sans I'aide d'un sysitme de développement
Yysteme Numenique Acquisition et Traitement de Yignat
ADRESSES
EN .
HEXADECIMAL
OH
VECTEUR RESET
VECTEUR D'INTERRUPTION
AH
2DH
41H
JONNEES D'INITIALISATION
x
PROGRAMME D'INITIALISATION.
B7H
BH
RROGRAMME PRINCIPAL
i ; BFH
100H
CONTROLE AUTOMAT IQUE DE GAIN
190H
300H
CORRECTEUR NUMERIQUE
3544
3544
JUTILISE
FFFH
=e
FIG 07.1 LOCALISATION DES PROGRAMMES
DANS L'EPROM.
Ml
complet. Nous avons utilisé le sysitme XDSI1 de Texas Instruments dont le
schéma synoptique est représenté sur la figure 1.8. Ce systtme nous a permis
de développer tous les logiciels nécessaires & notre application.
11L2.2 PROGRAMMES DEVELOPPES
1.2.2.1 CHOIX D’UN LANGAGE
Dans ce chapitre, nous ne présenterons que les organigrammes des,
Jogiciels que nous avons développés. Les listes des programmes sont donnéesen
ANNEXE . Mis A pat Je programme de téléchargement entre I’émulateur et le
micro-ordinateur écrit en basic ( C'est une communication série en full duplex
avec wn VAX ), tous les programmes sont écrits en assembleur pour
répon ces de vitesses inhérentes au traitement de signal temps
NTR 0
10L2.2.2.1 PRINCIPES arnmitl
Quand on regarde Ie diagramme = fonctionnel_du_—_convertisseur
analogique-numérique HS9414 ( Voir Document HYBRID SYSTEMS, p.l, fig Illa ),
on voit qu'il est essentiellement composé de deux parties:
= Un convertisseur 12 bits dont In gamme de conversion est 5 V.
- Un amplificateur & quatre gains programmables: 1, 10, 100, 500.
Pour réduire T'influence du bruit de, quantification, on amplifie le
signal enalogique avant de le convertir en signal discret. L’amplification du
signal doit s'effectuer de manitre que chaque conversion _analogique-digitale
s’effectue avec un pas de quantification minimum tout en évitant I’écrétage du
signal.
Le tablean suivant résume les gammes de conversion de chaque gain avec leur
pas de quantification cofrespondant:
Yyoteme Numerique doquisiticn et Sraitement de ¥ignat
MICRO-ORDINATEUR
Ecriture de programmes en
assembleur.
Compilation.
Programmation d'Eprom,
Téléchargement sur
émulateur,
Configuration
de
Vémulateur
Horloge HP option 004
FIG II.8 SYSTEME DE DEVELOPPEMENT
1-12
eee
GAINS GAMMES DE PAS DE
CONVERSION QUANTIFICATION
Sees
1 35 Volt 2.44 mVolt
10 £500 mVoit 244 Volt
100 +50 mVolt 244 Volt
500 £10 mVolt 48 pVolt
ADAPTATIF
Observons le sij
échantillons. On obtient ainsi une
wa Ned. Soient yet Y, le maxi
Inia nt de
cette suite. La connaissance dey,
est optimisé ou pas.
Pour déterminer si Je gain est optimisé, nous avons utilisé les,
critéres suivants:
1- Un gain est trop élevé si un écrétage du signal a eu lieu. Cela correspond
A Ia condition suivante: y, =+5V ou y,,=-5V. I faut alors diminaer te
gain,
2 Un gain est mop petit si y, et y,,, sont compris dans la gamme de
conversion du gain supérieur ( Voir tableau préoédent ).
EXEMPLE:
‘Supposons que nos échantillons ont é%é prélevés avec un gain de 10.
-Si y= 45.V ou y,,=-5 V, il faut diminuer Je gain et passer a Is
valeur 1.
Systeme Numenique dequisition et Tnaitement de fignak
1-13
= Par contre, si y,< 450 mV et y.,>-50 mV, le gain n'est pas optimise.
Tl faut alors augmenter Ie gain et passer & la valeur 100, Les
échantillons de In période suivante seront alors prélevés avec un gain de
100.
Le choix du gain dépend done du couple de valeurs (yy...
Cet algorithme simple présente cependant un inconvénient:
Pour les valeurs de (yy) s© touvant A Ia fronti’re entre deux
zones, il y a une ambiguité, L’algorithme ne permet pas de déterminer quel est
Je gain optimal a choisir, Il devient alors jinstable: Le gain optimal prend
aiternativement aprés chaque période de modulation une des valeurs des gains
comrespondant aux deux zones.
te (ce problme consiste A introduire
x A chaque g
iu 1 Gi-dessous
nouvelles gammes de conv i
plage dhystéresis égale & 2 % de Ia pleine a
GAINS GAMMES DE PAS DE
CON VERSION QUANT IFICATION
Yimin Ymax
1 35 Volt 2.44 mVolt
10 £490 mVolt (24.42 wVolt
100 249 mVolt 2.44 pVolt
500. 49.8 mVolt 0.48 pVolt
La figure L.8.1 représente la tension de sortie de Vamplificateur__ en
Yyoteme Numenique sequisitian et Fnaitement de Fignat
I-14
fonction de la tension d’entrée.
L’organigramme du programme de contréle automatique de gain est
donnée par ta figure M19.
31L2.2.3 DETECTION SYNCHRONE
Liorganigramme est représenté sur la figure TL10. 1 se déduit
aisément de T'algorithme( Voir Chapitre Détection synchrone ). Si on analyse
sa fonctionnalité, on voit qu’elle se décompose en deux parties distinctes:
Dons un premier temps, elle réalise Ia fonction de démodulation sinusofdale,
ensuite, elle int@gre le signal démodulé exactement sur une période.
mL; R
en p de T'équival
ie du corre
Z qui permet d’obtenir équatio
immédiatement I'algorithme de calcul.
ce filtre est faite au chapitre V.4.2.
Yyoteme Humenique Acquisition et Traitement de Yignat
TENSION DE SORTIE
(Volts)
IV représente I'hystérésis suivant Za
FIGURE [11.8.1 Tension de sortie de Yamplificateur 2
controle de gain automatique en
fonction de la tension d'entree
Acquisition de yt
Diminuer le gainf
Augmenter le gain
St ymax présent dans
tous les composants électroniques. ), puis ramener son spectre autour de zéro
par une démodulation de fréquence f,, afin de pouvoir procéder a sa mesure
( Voir figure IV.3 ).
IV.1.1.2 DETECTION DE "ZERO"
Bien souvent, la courbe de réponse B en fonction d’une excitation
est une courbe de résonance (Fig IV.4). Cette courbe est _essentiellement
caractérisée par deux paramdtres:
~ Son emplinade,munimum pour une excitation de résonance a,
jay Px kine) mihmatur de ampliude de resonance
des ay
wences utilisent
fréquence des lasers et des horloges
- La courbe d’absorption sarurée ”
rayonnement qui interagit avec la cellule,
= La courbe de réponse d’un résonateur atomique ( Par exemple, dans une
horloge césium: cavité RAMSEY ) en fonction de la fréquence d’interrogation
micro-onde.
On veut pointer avec le maximum de précision possible excitation
de résonance a, Pour cela, supposons que notre exci tion a soit au
voisinage de In résonance. Une petite variation de c@ ne sera pas suivie d’une
variation d’amplitude perceptible de . De plus, Ia variation de B ne
renseigne pas sur le sens de varintion de o. Pour remédier & ce probléme, on
procide de la maniéze suivante:
‘Au lieu d’utiliser une excitation fixe ot, on applique au systéme
physique une excitation d'interrogation dynamique o,,+A0..
tude Theorique de ta Detection Fynchrone
yi tiara!
Figure IV.4.1 EXCITATION DYNAMIQUE
SINUSOIDALE
Iv-3
Aa = bat sin( 2nf,t )
t est 1a variable temporelle,
f,, est la fréquence de modulation.
a, est une excitation constante
Bo. est la profondeur de modulation,
La figure IV.4.1 illustre cette technique. C'est une modulation
sinusoidale de amplitude de excitation, L’efficaché de cette technique
est déterminge par un choix judiciewx du couple de paramétres 3a et fy. Nous
nvanalyserons pas en détait ies conditions qui optimisent ce choix car elles
dépendent de Vexpression analytique de la courbe de réponse B(of,,) propre A
chaque résonateur.
éoonceg) quelques regles générales: La coube de la
interrogation quasi-statique du syst
2 a wi choix de f, est jis
eee bade pean i
largeur de raie Ar. ri fi
q 0
Dans les conditions d’interrogation du résonateur of da << Ar , on
peut utiliser un développement limité de B(c). On obtient alors:
3
a 4 ap Aa , 2°B Ao, 3°
= Ba,)+ Aaf — +—(S +—(G
Beograa= Bey) (5 Janey 21 baa? Jere, 3! Lac? Je,"
En remplagant Ac par sa valeur, les calculs nous montrent que le coefficient
de sin( 2nhf,t) est Ia réponse du systtme physique correspondant
Vamplitude du h™* harmonique de la fréquence fondamentale de modulation f,,
[2]. Les coefficients de sin( 2nhf,t ) pour h=1,2. et 3 sont:
Btude Theorique de ta Detection Yynchrone
a7B 1 ,9°B
2 UF Je, al dat Jona
ats 3,358
me Jeno, 5a0l 5a? Joma,
L’amplitude du h®™ harmonique est essentiellement composée de la dérivée
3", la contribution des (h+2)"™ et (hi4)*™* dérivées est moindre.
On voit qu'une détection d’amplitude de le dérivée premitre est
sensiblement équivalente & une détection d’amplitude de Vharmonique 1. Cele
est particulitrement vrai quand la courbe de résonance est symétrique,
crest-aedire les dftiles impaires s’annulent pour a=o,
4 Je cas .d’une modulation sinusoidal
i y isons de simplicité,
réalisation, on utilise aussi d'aut
= Modulation camrée
- Modulation tiangulaire 0
Nous n’analyserons pas en détail_—feurs. vantages respectifs. sur la
démodulation sinusoidale car ils dépendent en grande partic de J’expression
analytique de Blowt,).
1V.2 DETECTION SYNCHRONE DIGITALE
1V.2.1 INTRODUCTION
Le signal interrogation de fréquence 9196..MHz obtemy 8
partir du signal 10 MHz du quartz (Voir paragraphe 1L3) est modulé
sinusoidalement en fréquence & 137 Hz, puis injecté dans la cavité du
résonateur atomique & jet de oésium.
Dans ces conditions, le signal obtenu & Ja sortie du tube césium,
lorsque la fréquence centrale du signal interrogation n'est pas égale @ Ie
Stude Theorique de la Detection fynchrane
IV-5
fréquence de transition du césium, est un signal sinusoidal de fréquence
fy = 137 Hz et d’amplitude V. Soit- V, le signal non-aléatoire échantillonné a
la sortie du tube césium & J'instant t,, On a donc:
V,= V sinC a) Gant la phase du signal de sortie & I"instant t,
Le but de la détection synchrone est de calculer amplitude maximale du
signal, V. Pour cela, nous devons construire un estimateur qui remplisse cette
fonction.
Soit Y, le signal issu du résonateur, tenant compte du bruit
Gchantillonné & Vinstant ,, A pair des échantillonsY,, nous _allons
essayer de donner une estimation de I'amplitude du signal. Pour cela, nous
allons construire un estimateur a partir d’un crittre que nous allons définir.
En matidre dfésMlnateurs numériques, les deux crittres_ les plus _utilisés
i rijjport signal sur bruit et la minimisation
dans la suite,
IV.2.2 CHOIX D’UN CRITERE POUR
‘Avant de continuer cet exposé, nous allons préciser une notion qui
sera utilise par la suite. Pour caractfriser les performances de notre
estimateur, nous utilisons le critére du gain en rapport signal sur bruit
(GSNR) pour un estimateur numérique. Il a é€ défini par DOERING et al [3]
comme étant le rapport de a puissance de bruit A Venmée du détecteur sur la
puissance de bruit A la sortie du détecteur:
2< Bi BY >
GSNR =
Tl est entendu que I’on considére la méme bande passante A I’entrée ct 2 la
sortie du détecteur.
Stude Theonique de ta Detection ¥ynchrane
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5814)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- TD Percage de PieceDocument3 pagesTD Percage de Pieceoussama100% (1)
- Circuit MagnétiqueDocument26 pagesCircuit MagnétiqueoussamaNo ratings yet
- Le GrafcetDocument7 pagesLe GrafcetZineb BenhoumaidNo ratings yet
- BranchesDocument1 pageBranchesoussama67% (3)
- Preparer Une Soutenance OraleDocument1 pagePreparer Une Soutenance OraleoussamaNo ratings yet
- Cours Transmission de Mouvements Et1 PDFDocument17 pagesCours Transmission de Mouvements Et1 PDFoussamaNo ratings yet
- Exercice S GemmaDocument18 pagesExercice S GemmaZakariae El50% (2)
- Moments D InertieDocument1 pageMoments D InertiewaltaubinNo ratings yet
- Epreuve E41 Bts Elec 2018 SujetDocument24 pagesEpreuve E41 Bts Elec 2018 SujetoussamaNo ratings yet
- Perimetre Surface Volume PDFDocument2 pagesPerimetre Surface Volume PDFLinda ToumiNo ratings yet