You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5806)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Immo Off FilesDocument6 pagesImmo Off Filesاليزيد بن توهامي100% (1)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Weapons of Mass Persuasion Searchable PDFDocument39 pagesWeapons of Mass Persuasion Searchable PDFNational Security Oversight Institute of CanadaNo ratings yet
- IPC, Privacy and Drones - Unmanned Aerial VehiclesDocument30 pagesIPC, Privacy and Drones - Unmanned Aerial VehiclesNational Security Oversight Institute of CanadaNo ratings yet
- 200+ TOP RADIOLOGY Online Quiz Questions - Exam Test 2023Document24 pages200+ TOP RADIOLOGY Online Quiz Questions - Exam Test 2023Ayub Alam100% (1)
- RCMP Drone Privacy Impact AssessmentDocument33 pagesRCMP Drone Privacy Impact AssessmentNational Security Oversight Institute of CanadaNo ratings yet
- The Space RaceDocument15 pagesThe Space RaceRadu Petrusan100% (1)
- Astrological Combinations For Job ChangesDocument2 pagesAstrological Combinations For Job ChangesSaravana Kumar100% (2)
- APO SNP Training - GlanceDocument78 pagesAPO SNP Training - GlanceAshwani SharmaNo ratings yet
- Components and Nozzles: Job GuideDocument106 pagesComponents and Nozzles: Job GuideArtur TylickiNo ratings yet
- Refracto-Vibrometry: Polytec Technical PapersDocument4 pagesRefracto-Vibrometry: Polytec Technical PapersNational Security Oversight Institute of CanadaNo ratings yet
- Policing and COIN OperationsDocument134 pagesPolicing and COIN OperationsNational Security Oversight Institute of CanadaNo ratings yet
- Freedom of Information Police Network ConferenceDocument39 pagesFreedom of Information Police Network ConferenceNational Security Oversight Institute of CanadaNo ratings yet
- 2014 Fall FOIPN - AgendaDocument4 pages2014 Fall FOIPN - AgendaNational Security Oversight Institute of CanadaNo ratings yet
- 2010 Fall FOIPN SeminarDocument2 pages2010 Fall FOIPN SeminarNational Security Oversight Institute of CanadaNo ratings yet
- ACIC PortFolio 20200625Document16 pagesACIC PortFolio 20200625National Security Oversight Institute of CanadaNo ratings yet
- CVE Toronto Police Service FOCUS Situation TablesDocument15 pagesCVE Toronto Police Service FOCUS Situation TablesNational Security Oversight Institute of CanadaNo ratings yet
- Transparent Urban Structures (TUS)Document16 pagesTransparent Urban Structures (TUS)National Security Oversight Institute of CanadaNo ratings yet
- Videorec'08: Video Processing and RecognitionDocument2 pagesVideorec'08: Video Processing and RecognitionNational Security Oversight Institute of CanadaNo ratings yet
- International Criminal Investigative Analysis Fellowship: Geographic ProfilingDocument1 pageInternational Criminal Investigative Analysis Fellowship: Geographic ProfilingNational Security Oversight Institute of CanadaNo ratings yet
- Eyes in The Sky, The Domestic Deployment of Drone Technology & Aerial Surveillance in CanadaDocument166 pagesEyes in The Sky, The Domestic Deployment of Drone Technology & Aerial Surveillance in CanadaNational Security Oversight Institute of Canada100% (1)
- Video Technologies For National Security (VT4NS'08) : Theme: Deploying "Future-Proof" Video TechnologyDocument2 pagesVideo Technologies For National Security (VT4NS'08) : Theme: Deploying "Future-Proof" Video TechnologyNational Security Oversight Institute of CanadaNo ratings yet
- The National Biometrics Challenge: National Science and Technology Council Subcommittee On Biometrics August 2006Document23 pagesThe National Biometrics Challenge: National Science and Technology Council Subcommittee On Biometrics August 2006National Security Oversight Institute of CanadaNo ratings yet
- C-BET Evaluation of Voice BiometricsDocument11 pagesC-BET Evaluation of Voice BiometricsNational Security Oversight Institute of CanadaNo ratings yet
- 08 EncyclopediaOnBiometrics FaceRecChapterDocument9 pages08 EncyclopediaOnBiometrics FaceRecChapterNational Security Oversight Institute of CanadaNo ratings yet
- RCMP Criminal Investigative AnalysisDocument3 pagesRCMP Criminal Investigative AnalysisNational Security Oversight Institute of CanadaNo ratings yet
- 2007, Video Recog. Systems - Rail & TransitDocument12 pages2007, Video Recog. Systems - Rail & TransitNational Security Oversight Institute of CanadaNo ratings yet
- 2006, Video Recognition Systems ProgramDocument10 pages2006, Video Recognition Systems ProgramNational Security Oversight Institute of CanadaNo ratings yet
- Introduction To The First IEEE Workshop On Face Processing in VideoDocument2 pagesIntroduction To The First IEEE Workshop On Face Processing in VideoNational Security Oversight Institute of CanadaNo ratings yet
- Types of Surveillance Home Office - Security PDFDocument2 pagesTypes of Surveillance Home Office - Security PDFNational Security Oversight Institute of CanadaNo ratings yet
- Public Safety Drones, 3Rd Edition: Dan Gettinger MARCH 2020Document10 pagesPublic Safety Drones, 3Rd Edition: Dan Gettinger MARCH 2020National Security Oversight Institute of CanadaNo ratings yet
- Ijesrt: International Journal of Engineering Sciences & Research TechnologyDocument11 pagesIjesrt: International Journal of Engineering Sciences & Research TechnologyAna MariaNo ratings yet
- Digital Photography in OrthodonDocument48 pagesDigital Photography in OrthodonSrinivasan BoovaraghavanNo ratings yet
- Statement of Purpose For Studying MechatronicsDocument2 pagesStatement of Purpose For Studying MechatronicsBivash NiroulaNo ratings yet
- Classical Philosophical Text. Textual & Contexual Method.Document9 pagesClassical Philosophical Text. Textual & Contexual Method.Shatabdi Duttapol sc2nd yearNo ratings yet
- Robert BurnsDocument4 pagesRobert BurnsMilana SavicNo ratings yet
- Project Work On Chemistry: Change of PH During Formation of Curd From MilkDocument16 pagesProject Work On Chemistry: Change of PH During Formation of Curd From MilkYoezer Pelden100% (1)
- The Quantum Way of Cloud ComputingDocument4 pagesThe Quantum Way of Cloud ComputingNimish David MathewNo ratings yet
- Manual PelucheraDocument7 pagesManual Pelucheralvplus0% (1)
- An Analysis of Poverty in The Philippines 1Document27 pagesAn Analysis of Poverty in The Philippines 1MikaNo ratings yet
- Martin Gwapo JheroDocument8 pagesMartin Gwapo Jherokent baboys19No ratings yet
- Simple Clean Minimalist Ancient Egypt History Class Presentation A4 Lands - 20231116 - 143549 - 0000Document9 pagesSimple Clean Minimalist Ancient Egypt History Class Presentation A4 Lands - 20231116 - 143549 - 0000carlajanebaribaraleriaNo ratings yet
- 2 PerformanceofflowingwellsDocument16 pages2 PerformanceofflowingwellsnciriNo ratings yet
- Seb Sapura Esmeralda - 22062018Document1 pageSeb Sapura Esmeralda - 22062018Andra IrawanNo ratings yet
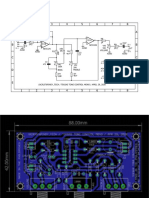
- Teksas Tone Control MonoDocument17 pagesTeksas Tone Control MonoRhenz TalhaNo ratings yet
- Nutritional StatusDocument13 pagesNutritional StatusArlene ValenzuelaNo ratings yet
- Supplemental Type Certificate: N UmberDocument2 pagesSupplemental Type Certificate: N UmberJuan C BalderasNo ratings yet
- Testing God: Ron Julian Article Bible StudyDocument8 pagesTesting God: Ron Julian Article Bible StudyapcobarrubiasNo ratings yet
- Recombinant DNA MCQDocument6 pagesRecombinant DNA MCQChaze WaldenNo ratings yet
- HUDA Policy Allowing Four BasementsDocument3 pagesHUDA Policy Allowing Four BasementsRahul JindalNo ratings yet
- Honey Python TestingDocument2 pagesHoney Python Testinger.honeyraj2016No ratings yet
- 2 Megabit (256 K X 8-Bit) CMOS EPROM: Distinctive CharacteristicsDocument12 pages2 Megabit (256 K X 8-Bit) CMOS EPROM: Distinctive CharacteristicsVictor TruccoNo ratings yet
- Student Exploration: HomeostasisDocument3 pagesStudent Exploration: HomeostasisJordan TorresNo ratings yet
- LSPU Self-Paced Learning Module (SLM) : CalculusDocument88 pagesLSPU Self-Paced Learning Module (SLM) : CalculusDharwyn Avy Advento CalmaNo ratings yet
- Investigation of Liquid-Liquid Phase Equilibria For Reactive Extraction of Lactic Acid With Organophosphorus SolventsDocument6 pagesInvestigation of Liquid-Liquid Phase Equilibria For Reactive Extraction of Lactic Acid With Organophosphorus Solventskudsiya firdousNo ratings yet