You might also like
- Solar Energy: A A B A ADocument8 pagesSolar Energy: A A B A ASanjay SharmaNo ratings yet
- 01-PV - Development of 3D Graph-Based Model To Examine Photovoltaic MicroDocument9 pages01-PV - Development of 3D Graph-Based Model To Examine Photovoltaic MicroBare WolfNo ratings yet
- Online Two-Section PV Array Fault Diagnosis With Optimized Voltage Sensor LocationsDocument10 pagesOnline Two-Section PV Array Fault Diagnosis With Optimized Voltage Sensor LocationsAhmed AliNo ratings yet
- Solar PV Module Fault Classification Using Artificial Intelligence and Machine Learning TechniquesDocument18 pagesSolar PV Module Fault Classification Using Artificial Intelligence and Machine Learning TechniquesJITAMITRANo ratings yet
- Information 11 00032Document13 pagesInformation 11 00032october87No ratings yet
- Base Photovoltaic DevicesDocument9 pagesBase Photovoltaic Devicessuresh rajNo ratings yet
- IM TCAD Multijunction Solar CellDocument5 pagesIM TCAD Multijunction Solar Cellishtiaq_ravian123No ratings yet
- An Electrical Insulator Defects Detection Method CDocument10 pagesAn Electrical Insulator Defects Detection Method Cpapuq solehNo ratings yet
- How Overhead Lines Cause Hot Spots and Reduce PV Plant EfficiencyDocument9 pagesHow Overhead Lines Cause Hot Spots and Reduce PV Plant EfficiencySahil InamdarNo ratings yet
- A Power Electronics Equalizer Application For Partially Shaded Photovoltaic ModulesDocument12 pagesA Power Electronics Equalizer Application For Partially Shaded Photovoltaic ModulesMahum JamilNo ratings yet
- 1AO.1.4 PaperDocument4 pages1AO.1.4 PaperDavid GarciaNo ratings yet
- Chebyshev Neural Network-Based Model For Dual-Junction Solar CellsDocument8 pagesChebyshev Neural Network-Based Model For Dual-Junction Solar CellsAnil Babu PynamNo ratings yet
- s41467 021 26480 9 PDFDocument12 pagess41467 021 26480 9 PDFDouglas CruzNo ratings yet
- Li - Prediction of I-V Characteristic CurveDocument16 pagesLi - Prediction of I-V Characteristic CurveosmanalNo ratings yet
- Fault Classification For Photovoltaic Modules Using Thermography and Machine Learning TechniquesDocument6 pagesFault Classification For Photovoltaic Modules Using Thermography and Machine Learning TechniquessramukNo ratings yet
- Lin 2015Document11 pagesLin 2015pwunipaNo ratings yet
- Energies: MTI-YOLO: A Light-Weight and Real-Time Deep Neural Network For Insulator Detection in Complex Aerial ImagesDocument19 pagesEnergies: MTI-YOLO: A Light-Weight and Real-Time Deep Neural Network For Insulator Detection in Complex Aerial ImagesRachna PathakNo ratings yet
- 61 Solar Energy Management As An Internet of Things (IoT) ApplicationDocument4 pages61 Solar Energy Management As An Internet of Things (IoT) ApplicationESP32 CAMNo ratings yet
- Faults Diagnosis in A Photovoltaic System Based On Multivariate Statistical AnalysisDocument3 pagesFaults Diagnosis in A Photovoltaic System Based On Multivariate Statistical Analysispat juvNo ratings yet
- Jphotov 2017 2770159Document9 pagesJphotov 2017 2770159Novizon YusufNo ratings yet
- An Unmanned Inspection System For Multiple Defects Detection in Photovoltaic PlantsDocument9 pagesAn Unmanned Inspection System For Multiple Defects Detection in Photovoltaic PlantsRodrigoNo ratings yet
- El-401: B. Tech Project-I Mid-Semester Evaluation Report: Dr. Anup Kumar MandpuraDocument10 pagesEl-401: B. Tech Project-I Mid-Semester Evaluation Report: Dr. Anup Kumar MandpuraMankaran SinghNo ratings yet
- Pap ST3.2 Task 13 Sept 2011Document5 pagesPap ST3.2 Task 13 Sept 2011Kaltenbacher ZsoltNo ratings yet
- 1 s2.0 S0960148120312301 MainDocument8 pages1 s2.0 S0960148120312301 Mainpyt081122No ratings yet
- Modeling of Solar Photovoltaic Module Using System IdentificationDocument3 pagesModeling of Solar Photovoltaic Module Using System IdentificationCristhiam Daniel Campos JulcaNo ratings yet
- Overview of Different MPPT Technique in Photovoltaic: Hina N. Kadeval & V. K. PatelDocument18 pagesOverview of Different MPPT Technique in Photovoltaic: Hina N. Kadeval & V. K. PatelTJPRC PublicationsNo ratings yet
- Esquema para El Diagnóstico Predictivo de Fallas en Módulos Fotovoltaicos Utilizando Imágenes Térmicas Web of SienceDocument11 pagesEsquema para El Diagnóstico Predictivo de Fallas en Módulos Fotovoltaicos Utilizando Imágenes Térmicas Web of SienceELIO GUSTAVO ARMAS TORRESNo ratings yet
- Quantifying The Risk of Power Loss in PV Modules DDocument9 pagesQuantifying The Risk of Power Loss in PV Modules DMatheus PessoaNo ratings yet
- 4IJEEEDocument7 pages4IJEEEyipatac291No ratings yet
- International Conference on Renewable Energies Using Newton RaphsonDocument8 pagesInternational Conference on Renewable Energies Using Newton RaphsonIsna SyilmiNo ratings yet
- Photoluminescence For Defect Detection On Full-Sized Photovoltaic ModulesDocument11 pagesPhotoluminescence For Defect Detection On Full-Sized Photovoltaic ModulesADITYA BHALEGHARENo ratings yet
- A Bolt Defect Recognition Algorithm Based On AttenDocument8 pagesA Bolt Defect Recognition Algorithm Based On AttenЕвгений ОблетовNo ratings yet
- Modeling and Signal Integrity Analysis of RRAM-Based Neuromorphic Chip Crossbar Array Using Partial Equivalent Element Circuit (PEEC) MethodDocument11 pagesModeling and Signal Integrity Analysis of RRAM-Based Neuromorphic Chip Crossbar Array Using Partial Equivalent Element Circuit (PEEC) MethodツギハギスタッカートNo ratings yet
- Fault Detection in Solar Power Plants Using Predictiveanalytic TechniquesDocument7 pagesFault Detection in Solar Power Plants Using Predictiveanalytic TechniquesRodrigoNo ratings yet
- Partial Shading Detection and MPPT Controller For Total Cross Tied Photovoltaic Using ANFISDocument5 pagesPartial Shading Detection and MPPT Controller For Total Cross Tied Photovoltaic Using ANFISidesajithNo ratings yet
- Impact of Micro-Cracks On The Degradation of Solar Cell Performance Based On Two-Diode Model ParametersDocument6 pagesImpact of Micro-Cracks On The Degradation of Solar Cell Performance Based On Two-Diode Model Parameterspadhu25No ratings yet
- BIDRAM - MPPT Shading Review PDFDocument15 pagesBIDRAM - MPPT Shading Review PDFGeyciane PinheiroNo ratings yet
- Bednar 2015Document9 pagesBednar 2015auth.scribd.com.8kx7vNo ratings yet
- Topology Optimization and AI-based Design of Power Electronic and Electrical Devices: Principles and MethodsFrom EverandTopology Optimization and AI-based Design of Power Electronic and Electrical Devices: Principles and MethodsNo ratings yet
- The Effect of Shading With Different PV Array Configurations On The Grid-Connected PV SystemDocument6 pagesThe Effect of Shading With Different PV Array Configurations On The Grid-Connected PV SystemabdelbassetNo ratings yet
- V S Bharath. Kurukuru, Ahteshmaul Haque, Mohammed Ali KhanDocument6 pagesV S Bharath. Kurukuru, Ahteshmaul Haque, Mohammed Ali KhanReham El-tuhamyNo ratings yet
- Hadi 2018 J. Phys. Conf. Ser. 1028 012065Document10 pagesHadi 2018 J. Phys. Conf. Ser. 1028 012065afif k fiskaNo ratings yet
- Design and Simulation of Op-Amp Based Neuron CircuitDocument7 pagesDesign and Simulation of Op-Amp Based Neuron CircuitIJRASETPublicationsNo ratings yet
- Line-to-Line Fault Detection For Photovoltaic Arrays Based On Multiresolution Signal Decomposition and Two-Stage Support Vector MachineDocument11 pagesLine-to-Line Fault Detection For Photovoltaic Arrays Based On Multiresolution Signal Decomposition and Two-Stage Support Vector MachinesreekanthaNo ratings yet
- Solar Energy Advances: Changrui Zhao, Jianwei Xiao, Yuanjie Yu, Jean-Nicolas JaubertDocument7 pagesSolar Energy Advances: Changrui Zhao, Jianwei Xiao, Yuanjie Yu, Jean-Nicolas JaubertARIKNo ratings yet
- Day Ahead ForecastDocument10 pagesDay Ahead ForecastVISHNU KARTHIK S 18BEE1089No ratings yet
- Characteristics of PV Array Used For Distributed Power Generation-Modeling and SimulationDocument6 pagesCharacteristics of PV Array Used For Distributed Power Generation-Modeling and Simulationhari198902234No ratings yet
- Electronic Circuit Simulation SoftwareDocument4 pagesElectronic Circuit Simulation SoftwareIJRASETPublicationsNo ratings yet
- An Investigation On Partial Shading of PV Modules With Different Connection Configurations of PV CellsDocument10 pagesAn Investigation On Partial Shading of PV Modules With Different Connection Configurations of PV CellsgamersamNo ratings yet
- Detection of Micro-Cracks in Solar Cell ImagesDocument5 pagesDetection of Micro-Cracks in Solar Cell ImagesMohammed AlsanabaniNo ratings yet
- Impact of PV Sources On The Overcurrent Relays in Medium Voltage Distribution NetworksDocument5 pagesImpact of PV Sources On The Overcurrent Relays in Medium Voltage Distribution NetworksFandy AconkNo ratings yet
- Energies 12 04547Document26 pagesEnergies 12 04547Manuel ChafloqueNo ratings yet
- Advanced Deep Learning MCC metricDocument6 pagesAdvanced Deep Learning MCC metricMorteza ShamsoddiniNo ratings yet
- Dark and Illuminated Characteristics of Photovoltaic Solar Modules. Part I: Influence of Dark Electrical StressDocument11 pagesDark and Illuminated Characteristics of Photovoltaic Solar Modules. Part I: Influence of Dark Electrical StressSarkarNo ratings yet
- Improved Transformer Fault Classification Using ANN and Differential MethodDocument9 pagesImproved Transformer Fault Classification Using ANN and Differential MethoddimasairlanggaNo ratings yet
- PV Cell and Module Degradation, Detection and Diagnostics: Eleni KaplaniDocument10 pagesPV Cell and Module Degradation, Detection and Diagnostics: Eleni KaplaniAndres PerezNo ratings yet
- Study On MPP MismatchDocument8 pagesStudy On MPP MismatchJean Venturin DestefaniNo ratings yet
- Modelingand Simulationofa DCMicro Gridwitha Model PredictiveDocument8 pagesModelingand Simulationofa DCMicro Gridwitha Model PredictiveMoulay FatimaNo ratings yet
- Differential Equation-Informed Neural Networks For State-of-Charge EstimationDocument15 pagesDifferential Equation-Informed Neural Networks For State-of-Charge EstimationBINITHA MATHEWNo ratings yet
- Comprehensive ApproachDocument11 pagesComprehensive ApproachnmotanNo ratings yet
- An Experimental Aluminum-Fueled Power Plant: Journal of Power SourcesDocument8 pagesAn Experimental Aluminum-Fueled Power Plant: Journal of Power Sourcesarna silmaNo ratings yet
- Materials Today EnergyDocument29 pagesMaterials Today Energyarna silmaNo ratings yet
- Unauthenticated - Downloaded 05/31/21 02:30 PM UTCDocument10 pagesUnauthenticated - Downloaded 05/31/21 02:30 PM UTCarna silmaNo ratings yet
- GIS-Based PV Site SuitabilityDocument8 pagesGIS-Based PV Site Suitabilityarna silmaNo ratings yet
- Application of An Artificial Neural Network To Improve Short-Term Road Ice ForecastsDocument12 pagesApplication of An Artificial Neural Network To Improve Short-Term Road Ice Forecastsarna silmaNo ratings yet
- Desalination: SciencedirectDocument12 pagesDesalination: Sciencedirectarna silmaNo ratings yet
- Renewable and Sustainable Energy ReviewsDocument6 pagesRenewable and Sustainable Energy Reviewsarna silmaNo ratings yet
- Solar Energy in India, Strategies Policies PerspectivesDocument9 pagesSolar Energy in India, Strategies Policies PerspectivesMaaz AhmadNo ratings yet
- Kannan 2020Document19 pagesKannan 2020arna silmaNo ratings yet
- Renewable and Sustainable Energy Reviews: Alireza Bahadori, Chikezie NwaohaDocument5 pagesRenewable and Sustainable Energy Reviews: Alireza Bahadori, Chikezie Nwaohaarna silmaNo ratings yet
- Energia Solar FuturoDocument14 pagesEnergia Solar FuturoFelipePuentesCantorNo ratings yet
- Renewable and Sustainable Energy Reviews: Li-Qun Liu, Zhi-Xin Wang, Hua-Qiang Zhang, Ying-Cheng XueDocument11 pagesRenewable and Sustainable Energy Reviews: Li-Qun Liu, Zhi-Xin Wang, Hua-Qiang Zhang, Ying-Cheng Xuearna silmaNo ratings yet
- Renewable and Sustainable Energy ReviewsDocument19 pagesRenewable and Sustainable Energy Reviewsarna silmaNo ratings yet
- AHP RoyDocument15 pagesAHP Royarna silmaNo ratings yet
- Decision Making Using The Analytic Hierarchy ProcessDocument4 pagesDecision Making Using The Analytic Hierarchy Processarna silmaNo ratings yet
- Wind in China 2Document6 pagesWind in China 2arna silmaNo ratings yet
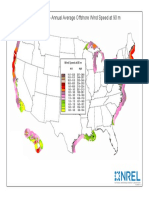
- Us 90m Offshore Wind SpeedDocument1 pageUs 90m Offshore Wind Speedarna silmaNo ratings yet
- IRENA Renewable Energy Statistics 2021Document460 pagesIRENA Renewable Energy Statistics 2021arna silmaNo ratings yet
- Edmonson - Pageantry Overture - AnalysisDocument3 pagesEdmonson - Pageantry Overture - Analysisapi-426112870No ratings yet
- European Business in China Position Paper 2017 2018 (English Version)Document408 pagesEuropean Business in China Position Paper 2017 2018 (English Version)Prasanth RajuNo ratings yet
- Project Wise CSR Expenditure FY202223Document15 pagesProject Wise CSR Expenditure FY202223gowowor677No ratings yet
- ACL GRC Risk Manager - Usage Guide V1.1Document28 pagesACL GRC Risk Manager - Usage Guide V1.1Rohit ShettyNo ratings yet
- GD&T WIZ Tutor Covers The Vast Breadth of Geometric Dimensioning and Tolerancing Without Compromising On The Depth. The Topics Covered AreDocument1 pageGD&T WIZ Tutor Covers The Vast Breadth of Geometric Dimensioning and Tolerancing Without Compromising On The Depth. The Topics Covered AreVinay ManjuNo ratings yet
- 41 PDFsam Redis CookbookDocument5 pages41 PDFsam Redis CookbookHữu Hưởng NguyễnNo ratings yet
- Abstract Photo CompositionDocument2 pagesAbstract Photo Compositionapi-260853196No ratings yet
- Essene Moses Ten CommandmentsDocument4 pagesEssene Moses Ten Commandmentsjeryon91No ratings yet
- A Summer Internship Project ON " To Study The Supply Chain Management On Amul Fresh Products" AT GCMMF, AmulDocument19 pagesA Summer Internship Project ON " To Study The Supply Chain Management On Amul Fresh Products" AT GCMMF, AmulweetrydhNo ratings yet
- How To Pass in University Arrear Exams?Document26 pagesHow To Pass in University Arrear Exams?arrearexam100% (6)
- Fehniger Steve-Pump VibrationDocument35 pagesFehniger Steve-Pump VibrationSheikh Shoaib100% (1)
- One - Pager - SOGEVAC SV 320 BDocument2 pagesOne - Pager - SOGEVAC SV 320 BEOLOS COMPRESSORS LTDNo ratings yet
- Best Home Oxygen Concentrators-Lowest Prices & Fast Shipping (Oxygen Machines) - 2021 - YuwellDocument1 pageBest Home Oxygen Concentrators-Lowest Prices & Fast Shipping (Oxygen Machines) - 2021 - YuwellPelayanan ResusitasiNo ratings yet
- PAPERBOARD QUALITYDocument8 pagesPAPERBOARD QUALITYaurelia carinaNo ratings yet
- Technical Description: BoilerDocument151 pagesTechnical Description: BoilerÍcaro VianaNo ratings yet
- TNG UPDATE InstructionsDocument10 pagesTNG UPDATE InstructionsDiogo Alexandre Crivelari CrivelNo ratings yet
- Victor Mejia ResumeDocument1 pageVictor Mejia Resumeapi-510300922No ratings yet
- Staining TechniquesDocument31 pagesStaining TechniquesKhadija JaraNo ratings yet
- GVB 1Document8 pagesGVB 1Aaron SylvestreNo ratings yet
- Themes in Romeo and JulietDocument7 pagesThemes in Romeo and JulietChiosa AdinaNo ratings yet
- Week 1 Gec 106Document16 pagesWeek 1 Gec 106Junjie FuentesNo ratings yet
- GKInvest Market ReviewDocument66 pagesGKInvest Market ReviewjhonxracNo ratings yet
- 2010-12 600 800 Rush Switchback RMK Service Manual PDFDocument430 pages2010-12 600 800 Rush Switchback RMK Service Manual PDFBrianCook73% (11)
- Aerospace Opportunities in SwitzerlandDocument5 pagesAerospace Opportunities in SwitzerlandBojana DekicNo ratings yet
- Barcelona Smart City TourDocument44 pagesBarcelona Smart City TourPepe JeansNo ratings yet
- 266 009-336Document327 pages266 009-336AlinaE.BarbuNo ratings yet
- Sample QuestionsDocument70 pagesSample QuestionsBushra MaryamNo ratings yet
- Maths SolutionDocument10 pagesMaths SolutionAbhay KumarNo ratings yet
- Proposed Panel Antenna: Globe Telecom ProprietaryDocument2 pagesProposed Panel Antenna: Globe Telecom ProprietaryJason QuibanNo ratings yet
- NSX 100-630 User ManualDocument152 pagesNSX 100-630 User Manualagra04100% (1)