You might also like
- Humidity and Dew-Point Calibration: Instruments, Systems & ServicesDocument70 pagesHumidity and Dew-Point Calibration: Instruments, Systems & ServicesCyriaque KagororaNo ratings yet
- Manual Books Schematic Circuit Diagram atDocument240 pagesManual Books Schematic Circuit Diagram atRudolf Oppermann100% (1)
- Videogames - in The Beginning - Ralph H. BaerDocument284 pagesVideogames - in The Beginning - Ralph H. BaerPedro Jorge Vilela Alheiros100% (1)
- WaterGEMS V8i User's GuideDocument1,380 pagesWaterGEMS V8i User's Guideilie_alex90% (20)
- Handbook 2019Document86 pagesHandbook 2019PoojitaNo ratings yet
- Calculus III: Practice Problems: Some Trigonometric IdentitiesDocument2 pagesCalculus III: Practice Problems: Some Trigonometric IdentitiesRoy VeseyNo ratings yet
- Prezentace Hnetynkova PDFDocument33 pagesPrezentace Hnetynkova PDFM Chandan ShankarNo ratings yet
- 1 Lie Groups: 1.1 The General Linear GroupDocument13 pages1 Lie Groups: 1.1 The General Linear GroupmarioasensicollantesNo ratings yet
- Aa547 Lecture Lec4 ExpandedDocument6 pagesAa547 Lecture Lec4 ExpandedBabiiMuffinkNo ratings yet
- Module 4 DiagonalisationDocument35 pagesModule 4 Diagonalisationaadhilakshmimr2025No ratings yet
- Non-Linear Dynamics Homework Solutions Week 4: Strogatz PortionDocument4 pagesNon-Linear Dynamics Homework Solutions Week 4: Strogatz PortionVivekNo ratings yet
- Formulas For Ipho: I Mathematics 1. 7. 3Document4 pagesFormulas For Ipho: I Mathematics 1. 7. 3Raaj EngNo ratings yet
- Handout B: Linear Algebra Cheat Sheet: 1.1 Vectors and MatricesDocument9 pagesHandout B: Linear Algebra Cheat Sheet: 1.1 Vectors and MatricesFrancisNo ratings yet
- Linear Algebra (MA - 102) Lecture - 12 Eigen Values and Eigen VectorsDocument22 pagesLinear Algebra (MA - 102) Lecture - 12 Eigen Values and Eigen VectorsPeter 2No ratings yet
- Math 121 HW 2Document6 pagesMath 121 HW 2Abdul TambunanNo ratings yet
- Algebraic Methods in Data Science: Lesson 3: Dan GarberDocument14 pagesAlgebraic Methods in Data Science: Lesson 3: Dan Garberrany khirbawyNo ratings yet
- λ and vectors x = 0 f or which Ax = λxDocument22 pagesλ and vectors x = 0 f or which Ax = λxJohn MarkNo ratings yet
- Linear AlgebraDocument16 pagesLinear AlgebraHue HueNo ratings yet
- Exam - 2011 - (Solutions)Document5 pagesExam - 2011 - (Solutions)Raymond LongNo ratings yet
- Mathematical Treatise On Linear AlgebraDocument7 pagesMathematical Treatise On Linear AlgebraJonathan MahNo ratings yet
- Physical ChemistryDocument190 pagesPhysical ChemistryAdarsh PriyaranjanNo ratings yet
- My Notes For Linear Algebra 987654Document33 pagesMy Notes For Linear Algebra 987654Shah FahadNo ratings yet
- Proof of A Conjecture On Polynomials Preserving Nonnegative MatricesDocument5 pagesProof of A Conjecture On Polynomials Preserving Nonnegative MatricesMarcyNo ratings yet
- Matrix Alg Slides DDocument44 pagesMatrix Alg Slides DBill Erick CastilloNo ratings yet
- Basic R Programming: ExercisesDocument7 pagesBasic R Programming: ExercisesBom VillatuyaNo ratings yet
- Equations For The Vector PotentialDocument14 pagesEquations For The Vector PotentialNadson Welkson Pereira de SouzaNo ratings yet
- Appendix: Mathematical BackgroundDocument132 pagesAppendix: Mathematical BackgroundDominik SchmidtNo ratings yet
- Gma1 2 2022 ContinutDocument64 pagesGma1 2 2022 ContinutMesieur LeblancNo ratings yet
- MTHS111 Lesson2 2024Document34 pagesMTHS111 Lesson2 2024pearphelokazi45No ratings yet
- Conclusiones EtaDocument17 pagesConclusiones EtaBart MaxNo ratings yet
- MatrixDocument4 pagesMatrixKani MozhiNo ratings yet
- PART1Document27 pagesPART1Angelito MogollonNo ratings yet
- On Fractional Kinetic Equations: R.K. SaxenaDocument8 pagesOn Fractional Kinetic Equations: R.K. SaxenaNikos MantzakourasNo ratings yet
- Lecture 5Document5 pagesLecture 5laxmivandanaNo ratings yet
- Linear Algebra & Analysis Review As Covered in Class UW EE/AA/ME 578 Convex OptimizationDocument16 pagesLinear Algebra & Analysis Review As Covered in Class UW EE/AA/ME 578 Convex OptimizationAbby JonesNo ratings yet
- Shearer Levy Chapter 8Document20 pagesShearer Levy Chapter 8Daniel ComeglioNo ratings yet
- HW 11Document3 pagesHW 11snow92686No ratings yet
- A New Polynomial-Time Algorithm For Linear Programming: N. KarmarkarDocument23 pagesA New Polynomial-Time Algorithm For Linear Programming: N. KarmarkarPablo andres7123No ratings yet
- I BTech Formula Handbook 2019 Updated-Feb 2021Document90 pagesI BTech Formula Handbook 2019 Updated-Feb 2021Xyz XyzNo ratings yet
- 1 Symmetry of Potential and WavefunctionDocument3 pages1 Symmetry of Potential and WavefunctionHalloMannNo ratings yet
- Exámenes Cambridge (Parte IA, 2008)Document26 pagesExámenes Cambridge (Parte IA, 2008)Leonidas ValenciaNo ratings yet
- Paperia 1 2022Document7 pagesPaperia 1 2022MauricioNo ratings yet
- Chapter 0 - Miscellaneous Preliminaries: EE 520: Topics - Compressed Sensing Linear Algebra ReviewDocument18 pagesChapter 0 - Miscellaneous Preliminaries: EE 520: Topics - Compressed Sensing Linear Algebra ReviewmohanNo ratings yet
- Differentiable ManifoldsDocument5 pagesDifferentiable ManifoldsMohdNo ratings yet
- Lecture 17 - Representation Theory of Lie Groups and Lie Algebras (Schuller's Geometric Anatomy of Theoretical Physics)Document12 pagesLecture 17 - Representation Theory of Lie Groups and Lie Algebras (Schuller's Geometric Anatomy of Theoretical Physics)Simon ReaNo ratings yet
- Appendix: University of California, BerkeleyDocument14 pagesAppendix: University of California, BerkeleycNo ratings yet
- Mechanics Solutions 1Document3 pagesMechanics Solutions 1Argh AaarghNo ratings yet
- 15 462 Fall03 WrAssign1 AnswerDocument5 pages15 462 Fall03 WrAssign1 AnswerBayu Yudha PratamaNo ratings yet
- Eigenvalues and EigenvectorsDocument23 pagesEigenvalues and EigenvectorsViorel AdirvaNo ratings yet
- Gi Part1 PDFDocument57 pagesGi Part1 PDFasdfghjNo ratings yet
- Aa547 Lecture Lec9XDocument12 pagesAa547 Lecture Lec9XBabiiMuffinkNo ratings yet
- N-Body Problems Math118, O. Knill: J I J I I J 3Document2 pagesN-Body Problems Math118, O. Knill: J I J I I J 3PANKOPANKNo ratings yet
- Solution Manual For Discrete Time Signal Processing 3 E 3rd Edition Alan V Oppenheim Ronald W SchaferDocument4 pagesSolution Manual For Discrete Time Signal Processing 3 E 3rd Edition Alan V Oppenheim Ronald W SchaferHoward ZhangNo ratings yet
- On Trace Zero Matrices: - 4 - R-ES-O-N-A-N-C-E - I-J-u-n-e-2-0-0-2Document13 pagesOn Trace Zero Matrices: - 4 - R-ES-O-N-A-N-C-E - I-J-u-n-e-2-0-0-2BagusNo ratings yet
- InterpallDocument4 pagesInterpallAzad RazaNo ratings yet
- EEEN519 Practice Questions and ASSIGNMETDocument11 pagesEEEN519 Practice Questions and ASSIGNMETMustapha ShehuNo ratings yet
- ALGExercises 4Document3 pagesALGExercises 4Cayuss Andrei MihăițoaiaNo ratings yet
- MA111 Lec8 D3D4Document33 pagesMA111 Lec8 D3D4pahnhnykNo ratings yet
- Robotics1 13.01.09Document5 pagesRobotics1 13.01.09asalifew belachewNo ratings yet
- WOMPtalk ManifoldsDocument11 pagesWOMPtalk ManifoldsKirk BennettNo ratings yet
- SvdnotesDocument10 pagesSvdnotesmaroju prashanthNo ratings yet
- The Equidistribution Theory of Holomorphic Curves. (AM-64), Volume 64From EverandThe Equidistribution Theory of Holomorphic Curves. (AM-64), Volume 64No ratings yet
- Harmonic Maps and Minimal Immersions with Symmetries (AM-130), Volume 130: Methods of Ordinary Differential Equations Applied to Elliptic Variational Problems. (AM-130)From EverandHarmonic Maps and Minimal Immersions with Symmetries (AM-130), Volume 130: Methods of Ordinary Differential Equations Applied to Elliptic Variational Problems. (AM-130)No ratings yet
- Tables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27From EverandTables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27No ratings yet
- Planetary Motion: Winter Semester 2006/7Document28 pagesPlanetary Motion: Winter Semester 2006/7đại phạmNo ratings yet
- Caldwell@mppmu - Mpg.de: Computational Physics IDocument11 pagesCaldwell@mppmu - Mpg.de: Computational Physics Iđại phạmNo ratings yet
- Partial Differential Equations: JacobiDocument25 pagesPartial Differential Equations: Jacobiđại phạmNo ratings yet
- Systems of Linear Equations: A X X X X A X X X X A X X X XDocument27 pagesSystems of Linear Equations: A X X X X A X X X X A X X X Xđại phạmNo ratings yet
- Representing Numbers On The Computer: What Happened?Document20 pagesRepresenting Numbers On The Computer: What Happened?đại phạmNo ratings yet
- Numerical Algorithms For Differential Equations: Topics: Adaptive Step Size, Higher Derivatives, Several DimensionsDocument24 pagesNumerical Algorithms For Differential Equations: Topics: Adaptive Step Size, Higher Derivatives, Several Dimensionsđại phạmNo ratings yet
- Ordinary Differential Equations: Friction Among Parts - Wind Resistance - Gravity (If Going Uphill)Document25 pagesOrdinary Differential Equations: Friction Among Parts - Wind Resistance - Gravity (If Going Uphill)đại phạmNo ratings yet
- Planetary Motion: Winter Semester 2006/7Document28 pagesPlanetary Motion: Winter Semester 2006/7đại phạmNo ratings yet
- 3 DVisualisationDocument12 pages3 DVisualisationđại phạmNo ratings yet
- Data Movement InstructionsDocument22 pagesData Movement InstructionsMarc Ryan SajaNo ratings yet
- 9 9 22 RDA - Monitoring ToolDocument3 pages9 9 22 RDA - Monitoring ToolMirard A. MagsipocNo ratings yet
- Wharton Casebook 2017Document12 pagesWharton Casebook 2017karakurizar10No ratings yet
- Software Quality AssuranceDocument19 pagesSoftware Quality AssuranceSYED SUMAIR AHMED JAFFRINo ratings yet
- S4100 0077 PDFDocument12 pagesS4100 0077 PDFAlkasser BolNo ratings yet
- Ultimate SU750 3D NAND SSD: Features Ordering InformationDocument2 pagesUltimate SU750 3D NAND SSD: Features Ordering InformationEgiNo ratings yet
- JavaScript - Object Oriented Programming Using ES6 - by NC Patro - CodeburstDocument1 pageJavaScript - Object Oriented Programming Using ES6 - by NC Patro - CodeburstBleep NewsNo ratings yet
- XML Encryption: Netaji Subhash Engineering CollegeDocument10 pagesXML Encryption: Netaji Subhash Engineering CollegeSayan_tanNo ratings yet
- Nursing Informatics Roles, Competencis, SkillsDocument10 pagesNursing Informatics Roles, Competencis, SkillsAhmed MohamedNo ratings yet
- Lab # 01: Introduction To Basic Logic Gate Ic's On Digital Logic Trainer and Proteus Simulation in LabDocument10 pagesLab # 01: Introduction To Basic Logic Gate Ic's On Digital Logic Trainer and Proteus Simulation in Labearn moneyNo ratings yet
- Pest NGPDocument49 pagesPest NGPALNATRON GROUPSNo ratings yet
- Digital Divide Digital InequalityDocument8 pagesDigital Divide Digital InequalityHimanshu SoniNo ratings yet
- Klayout-0 21 16Document511 pagesKlayout-0 21 16nablakNo ratings yet
- Beneheart d1 Manual de ServicioDocument70 pagesBeneheart d1 Manual de ServicioLina GuerraNo ratings yet
- New Pattern Seating Arrangement Questions Solution: Please Subscribe, Join& Like Our Above Social NetworkDocument100 pagesNew Pattern Seating Arrangement Questions Solution: Please Subscribe, Join& Like Our Above Social NetworkGSSS AM BARWALA 1428No ratings yet
- Installation Guide V8.5.6.0 - CCTV CameraDocument196 pagesInstallation Guide V8.5.6.0 - CCTV CameraRajkumarNo ratings yet
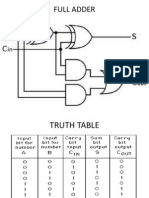
- Full AdderDocument4 pagesFull AdderMuniba Ahmad0% (1)
- Homomorphic EncryptionDocument4 pagesHomomorphic EncryptionNanditha KNo ratings yet
- Sip PresentationDocument12 pagesSip PresentationManza DeshmukhNo ratings yet
- 11G-Reduce XTTS Downtime Using Cross Platform Incremental BackupDocument16 pages11G-Reduce XTTS Downtime Using Cross Platform Incremental Backupsaidi_mNo ratings yet
- SOE - 2.4.00E - SOEEXEC Program ReferenceDocument37 pagesSOE - 2.4.00E - SOEEXEC Program Referencedca_marshallNo ratings yet
- Logicore Ip Reed-Solomon Encoder v8.0: Product GuideDocument30 pagesLogicore Ip Reed-Solomon Encoder v8.0: Product GuideamanNo ratings yet
- 2D23D Final Report Team B3Document31 pages2D23D Final Report Team B3Jeremy LeungNo ratings yet
- P38 Door Latch TestsDocument2 pagesP38 Door Latch TestssegurahNo ratings yet
- AIX ContainerDocument13 pagesAIX ContainerSergey VoronNo ratings yet
- Records Result - 50 ResultsDocument1 pageRecords Result - 50 Resultssarbalice39No ratings yet