You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Us8371532 PDFDocument12 pagesUs8371532 PDF雷黎明No ratings yet
- EP0564126A1Document15 pagesEP0564126A1雷黎明No ratings yet
- US20220267025A1 Pylon Tracking Systems For Tiltrotor AircraftDocument17 pagesUS20220267025A1 Pylon Tracking Systems For Tiltrotor Aircraft雷黎明No ratings yet
- EP1539573B1Document21 pagesEP1539573B1雷黎明No ratings yet
- EP0744338A1Document16 pagesEP0744338A1雷黎明No ratings yet
- US20140133980A1Document12 pagesUS20140133980A1雷黎明No ratings yet
- US20180327086A1Document13 pagesUS20180327086A1雷黎明No ratings yet
- US10479497Document32 pagesUS10479497雷黎明No ratings yet
- US10640205Document14 pagesUS10640205雷黎明No ratings yet
- US3279721Document8 pagesUS3279721雷黎明No ratings yet
- US20110274550A1Document9 pagesUS20110274550A1雷黎明No ratings yet
- US10450060Document13 pagesUS10450060雷黎明No ratings yet
- United States Patent: Kizhakkepat Et AlDocument32 pagesUnited States Patent: Kizhakkepat Et Al雷黎明No ratings yet
- NASA/Army Rotorcraft Technology: NI/SIDocument594 pagesNASA/Army Rotorcraft Technology: NI/SI雷黎明No ratings yet
- US5186686Document11 pagesUS5186686雷黎明No ratings yet
- US9347487Document12 pagesUS9347487雷黎明No ratings yet
- US4804352Document15 pagesUS4804352雷黎明No ratings yet
- The Overview of KARI Bearingless Main Rotor Hub SystemDocument12 pagesThe Overview of KARI Bearingless Main Rotor Hub System雷黎明No ratings yet
- Determination of The Structural Properties of Helicopter Rotor BladesDocument20 pagesDetermination of The Structural Properties of Helicopter Rotor Blades雷黎明No ratings yet
- The XV-15 Tilt Rotor Research Aircraft: Daniel C. Dugan, Ronald G. Erhart, and Laurel G. SchroersDocument27 pagesThe XV-15 Tilt Rotor Research Aircraft: Daniel C. Dugan, Ronald G. Erhart, and Laurel G. Schroers雷黎明No ratings yet
- Rotor Design Options For Improving Tiltrotor Whirl-Flutter Stability MarginsDocument9 pagesRotor Design Options For Improving Tiltrotor Whirl-Flutter Stability Margins雷黎明No ratings yet
- Airbus Commercial Aircraft AC A330 700LDocument242 pagesAirbus Commercial Aircraft AC A330 700L雷黎明No ratings yet
- Us 10457380Document13 pagesUs 10457380雷黎明No ratings yet
- Aerodynamic Blade Design With Multi-Objective Optimization For A Tiltrotor AircraftDocument12 pagesAerodynamic Blade Design With Multi-Objective Optimization For A Tiltrotor Aircraft雷黎明No ratings yet
- United States Patent: (45) Date of Patent: Nov. 12, 2019Document14 pagesUnited States Patent: (45) Date of Patent: Nov. 12, 2019雷黎明No ratings yet
- United States Patent: Kizhakkepat Et AlDocument32 pagesUnited States Patent: Kizhakkepat Et Al雷黎明No ratings yet
- The European Tilt Rotor-Status of ERICA Design and Test ActivitiesDocument23 pagesThe European Tilt Rotor-Status of ERICA Design and Test Activities雷黎明No ratings yet
- Transition Flight Modeling of A Fixed-Wing VTOL UAVDocument23 pagesTransition Flight Modeling of A Fixed-Wing VTOL UAVkhoamaiNo ratings yet
- Vertical Take-Off and Landing (VTOL) : University of Colorado, Boulder, CO, 80309Document8 pagesVertical Take-Off and Landing (VTOL) : University of Colorado, Boulder, CO, 80309Divy AgarwalNo ratings yet
- The XV-15 Tilt Rotor Research Aircraft: Daniel C. Dugan, Ronald G. Erhart, and Laurel G. SchroersDocument27 pagesThe XV-15 Tilt Rotor Research Aircraft: Daniel C. Dugan, Ronald G. Erhart, and Laurel G. Schroers雷黎明No ratings yet
- To Urban Air Mobility En-Route To Urban Air MobilityDocument36 pagesTo Urban Air Mobility En-Route To Urban Air MobilityMike Chrome100% (6)
- Gailliard On v-22Document52 pagesGailliard On v-22Brandon LinNo ratings yet
- The European Tilt Rotor-Status of ERICA Design and Test ActivitiesDocument23 pagesThe European Tilt Rotor-Status of ERICA Design and Test Activities雷黎明No ratings yet
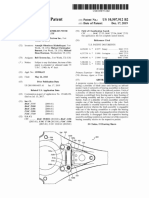
- United States Patent: Robertson Et Al. (45) Date of Patent: Jul. 11, 2017Document17 pagesUnited States Patent: Robertson Et Al. (45) Date of Patent: Jul. 11, 2017gorgiNo ratings yet
- Flight Performance of A Package Delivery Quad Rotor BiplaneDocument12 pagesFlight Performance of A Package Delivery Quad Rotor BiplaneBreno Brito MirandaNo ratings yet
- Aerospace 09 00208Document32 pagesAerospace 09 00208Munib KhanNo ratings yet
- Platinum Collection v-22 Osprey ManualDocument24 pagesPlatinum Collection v-22 Osprey ManualP0wer3D100% (2)
- Design Challenges in VTOL Aircraft - A ReviewDocument5 pagesDesign Challenges in VTOL Aircraft - A ReviewInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Wired - November 2013 UkDocument214 pagesWired - November 2013 Ukredjade100% (3)
- RC Plane So Vertikalno PoletuvanjeDocument164 pagesRC Plane So Vertikalno PoletuvanjeBlashko Gjorgjiev100% (1)
- A Survey of Hybrid Unmanned Aerial VehiclesDocument15 pagesA Survey of Hybrid Unmanned Aerial VehiclesAnonymous 55cH67eIxNo ratings yet
- Brochure Aw609Document5 pagesBrochure Aw609Maurizio BernasconiNo ratings yet
- Design, Construction, and Flight Testing of The World's Fastest Micro-Scale QuadcopterDocument15 pagesDesign, Construction, and Flight Testing of The World's Fastest Micro-Scale QuadcoptergrafpapNo ratings yet
- Volocopter WhitePaper 1 01Document28 pagesVolocopter WhitePaper 1 01IsamarMM01No ratings yet
- Research Commons at The University of WaikatoDocument122 pagesResearch Commons at The University of WaikatoAman SahareNo ratings yet
- TiltRotor PilotsGuideDocument24 pagesTiltRotor PilotsGuidealalexNo ratings yet
- Analysis of Vertical Take Off Landing Aircraft Using CFD IJERTV3IS090267Document15 pagesAnalysis of Vertical Take Off Landing Aircraft Using CFD IJERTV3IS090267Prasanna NaikNo ratings yet
- NASA 17 XV 15 Tilt Rotor Research AircraftDocument222 pagesNASA 17 XV 15 Tilt Rotor Research AircraftÁlvaro Conti Filho100% (1)
- Lilium AnalysisDocument35 pagesLilium AnalysisrmcdoNo ratings yet
- 381588main Tilt Rotor Contributions HDocument2 pages381588main Tilt Rotor Contributions HTufel NooraniNo ratings yet
- Designing, Modeling and Control of A Tilting Rotor Quadcoper PDFDocument128 pagesDesigning, Modeling and Control of A Tilting Rotor Quadcoper PDFpriyanshi pal0% (1)
- Down WashDocument337 pagesDown WashbontonrouletNo ratings yet
- BLR 212Document8 pagesBLR 212KaradiasNo ratings yet
- Heavy Lift Helicopter DesignDocument115 pagesHeavy Lift Helicopter DesignHo Trung KienNo ratings yet
- Zhou 2019 VtolDocument31 pagesZhou 2019 VtolAtharva SalunkheNo ratings yet
- Performance Validation of A Novel High Speed, eVTOL Compound Helicopter DemonstratorDocument10 pagesPerformance Validation of A Novel High Speed, eVTOL Compound Helicopter DemonstratorOliver RailaNo ratings yet
- P156 P190 Reference Section Worldwide All List)Document20 pagesP156 P190 Reference Section Worldwide All List)mahdisajjadi100% (1)