You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5806)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Microcontroller HardwareDocument45 pagesMicrocontroller HardwaredineshlathiaNo ratings yet
- Computer Organization and ArchitectureDocument111 pagesComputer Organization and ArchitectureKarthik P67% (3)
- Ee 309 M1Document7 pagesEe 309 M1Basheer V.PNo ratings yet
- What Does It Do An Infant Incubator Is Used Mainly To Keep A Baby's Core Temperature Stable at 37 Degrees PhysiologyDocument1 pageWhat Does It Do An Infant Incubator Is Used Mainly To Keep A Baby's Core Temperature Stable at 37 Degrees PhysiologyBasheer V.PNo ratings yet
- 8259A Programmable Interrupt ControllerDocument18 pages8259A Programmable Interrupt ControllerBasheer V.PNo ratings yet
- Unit Ii Hardware Interfacing With Intel 8085Document44 pagesUnit Ii Hardware Interfacing With Intel 8085Basheer V.PNo ratings yet
- 8237Document14 pages8237Basheer V.PNo ratings yet
- Features of 8051Document21 pagesFeatures of 8051Basheer V.PNo ratings yet
- Adder Sub AluDocument22 pagesAdder Sub AluBasheer V.PNo ratings yet
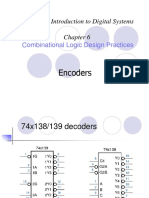
- DecoderDocument17 pagesDecoderBasheer V.P100% (1)
- Combinational Logic Design&AnalysisDocument34 pagesCombinational Logic Design&AnalysisBasheer V.PNo ratings yet
- Chapter 3 - Combinational Logic DesignDocument32 pagesChapter 3 - Combinational Logic DesignBasheer V.PNo ratings yet
- EncoderDocument15 pagesEncoderBasheer V.PNo ratings yet
- Vlsi Design: Mos TransistorDocument162 pagesVlsi Design: Mos TransistorBasheer V.PNo ratings yet
- Vlsi Design: Mos TransistorDocument162 pagesVlsi Design: Mos TransistorBasheer V.PNo ratings yet
- DiblDocument25 pagesDiblBasheer V.PNo ratings yet
- DSDDocument56 pagesDSDBasheer V.PNo ratings yet
- CoDocument154 pagesCoFazal JadoonNo ratings yet
- Microcontroller Architecture & Interfacing Concepts: Facilitated By: Shrikrishna. C-DAC BangaloreDocument65 pagesMicrocontroller Architecture & Interfacing Concepts: Facilitated By: Shrikrishna. C-DAC Bangalorequasar1234No ratings yet
- Up DoneDocument139 pagesUp DoneanjanaNo ratings yet
- UNIT Test MpiDocument8 pagesUNIT Test MpiBavisetti VenkatNo ratings yet
- Unit 4 COADocument30 pagesUnit 4 COAVighnesh SarwankarNo ratings yet
- COA MODULE Input Output OrganizationDocument40 pagesCOA MODULE Input Output OrganizationDesyilalNo ratings yet
- User's Manual: Nucom PCI-7841/cPCI-7841/PM-7841Document52 pagesUser's Manual: Nucom PCI-7841/cPCI-7841/PM-7841djicccNo ratings yet
- Basic Discussion On Pcie Configuration and EnumerationDocument16 pagesBasic Discussion On Pcie Configuration and EnumerationnazimNo ratings yet
- MPMC - UNIT - 2 - All SlidesDocument117 pagesMPMC - UNIT - 2 - All Slidesneeraj ChowdaryNo ratings yet
- Microprocessor 8085Document25 pagesMicroprocessor 8085hetal_limbaniNo ratings yet
- The Sysfs Filesystem - Used For User Space Access of I2c Based EepromDocument14 pagesThe Sysfs Filesystem - Used For User Space Access of I2c Based EepromranbumailsNo ratings yet
- Microcontrollers 8051-Notes For IV Sem StudentsDocument60 pagesMicrocontrollers 8051-Notes For IV Sem StudentsDr Ravi Kumar A.VNo ratings yet
- z80380 CPU User S ManualDocument268 pagesz80380 CPU User S ManualWolfgangNo ratings yet
- Microproessor - Microprocessor and Its Components - : Qisthi Al Hazmi HR., S.T., M.TDocument21 pagesMicroproessor - Microprocessor and Its Components - : Qisthi Al Hazmi HR., S.T., M.TChuenk NeutronNo ratings yet
- Using C To Create Interrupt Driven Systems On Blackfin ProcessorsDocument9 pagesUsing C To Create Interrupt Driven Systems On Blackfin ProcessorsEmin KültürelNo ratings yet
- 8086 InstructionDocument44 pages8086 InstructionhrrameshhrNo ratings yet
- The 8085 and Its Busses: 8-Bit General Purpose 64K Byte of Memory 40 Pins Maximum Frequency of 3 MHZDocument42 pagesThe 8085 and Its Busses: 8-Bit General Purpose 64K Byte of Memory 40 Pins Maximum Frequency of 3 MHZraghuramu23456No ratings yet
- Yaskawa MP Ethernet ManualDocument44 pagesYaskawa MP Ethernet ManualCesar PerezNo ratings yet
- KLP6 POST Diagnostic Test Card ManualDocument36 pagesKLP6 POST Diagnostic Test Card ManualsocraticusNo ratings yet
- Basic Microcomputer DesignDocument25 pagesBasic Microcomputer Designmhel_almoNo ratings yet
- ECEE 5623 - Real-Time Embedded SystemsDocument13 pagesECEE 5623 - Real-Time Embedded SystemsMehul PatelNo ratings yet
- Unit-5 Input Output OrganisationDocument19 pagesUnit-5 Input Output OrganisationRishabh SrivastavaNo ratings yet
- MsinfoDocument169 pagesMsinfoJeffery ManzanaresNo ratings yet
- Chapter 13: I/O SystemsDocument31 pagesChapter 13: I/O SystemsFarooq ShadNo ratings yet
- CEA201Document3 pagesCEA201caothequanNo ratings yet
- Design of The Smart Glove To System The Visually ImpairedDocument63 pagesDesign of The Smart Glove To System The Visually ImpairedNexgen TechnologyNo ratings yet
- Using The AT89C2051 MCU As Virtual MachineDocument11 pagesUsing The AT89C2051 MCU As Virtual MachineplcmanaNo ratings yet
- 78K0-KB2 Sample ProgramDocument58 pages78K0-KB2 Sample ProgramAnonymous pu1L9ZNo ratings yet