CHAPTER 13
Control theory: analysis
Chapter objectives
‘When you have finished this chapter you should be able to:
= understand poles and zeros as valuable tools for analysis and design of
control systems
i= find the step response of a first-order control system;
i= find the step response of a second-order control system;
= use the Routh-Hurwitz criterion to determine the stability of control
systems;
= determine steady-state errors for a unity feedback system;
'= determine steady-state errors for a non-unity feedback system.
13.1 Introduction
This chapter demonstrates the applications of the system representation by evalu-
ating the transient response from the system model. The concept of poles and
zeros, which is a valuable analysis and design tool is first discussed, then we
show how to analyze our models in order to find the step response of first- and
second-order control systems.
13.2 System response
Nowadays, it is possible to implement continuous control systems directly
using computers. If the computer is fast enough (a close enough approximation
449
450
Mechatronics
Computer
CO). > Ceo —
Figure 13.1 A computerconroled motor spend control em
to continuous), then the system generally works as predicted by continuous
theory. Consider for example, a motor speed control system: normally, a dc.
motor's speed will not be constant if there are load variations, and feedback
from a tachometer can be used to reduce speed fluctuations as shown in
Figure 13.1
However, as the sampling speed varies the system's performance changes.
For example, at a high sampling rate, we might get a response such as the one
shown in Figure 13.2(a). As the sampling rate is reduced, we might get the response
shown in Figure 13.2(b). Finally, at a rate slow enough, the system might go
unstable and the response would be depicted as shown in Figure 13.2(c).
13.2.1 Poles and zeros of a transfer function
The poles of a transform function are the values of the Laplace transform variable,
s, that cause the transfer function to be infinite; they are the roots of the
denominator of the function that are common to the roots of the numerator.
The zeros of a transform function are the values of the Laplace transform
variable, s, that cause the transfer function to be zero; they are the roots of the
numerator of the function that are common to the roots of the denominator.
‘The poles and zeros have certain characteristics:
= A pole of the input function generates the form of the forced response.
WA pole of the transfer function determines the form of the natural
response,
= A pole on the real axis generates an exponential response of the form e~*,
where a is the pole location on the real axis.
= The poles and zeros generate the amplitudes for both the forced and natural
responses.
Control theory: analysis _451
Speed Speed
“Actual
PRA AeA. Desi
Actual
~ Desired
Time
@
Time
Speed
tual
Desired
Time
©
Figure 13.2 Variance bowween actual and devred response with diferent sampling rates (a) Nii
(b) reduced; (2) ‘exea-zeduced showing instability
13.3 Dynamic characteristics of a control system
Most dynamic systems can be modeled as linear ordinary differential equations
with constant coefficients, The general way of expressing the dynamics of linear
systems is:
a3.)
where Xoue is the output variable, Xjq is the input variable, 4, and Byy are
constant coefficients of the system's behavior; and N and M independently define
the order of the system.
It should be mentioned that many mechatronic systems exhibit non-linear
behavior and therefore, cannot be accurately modeled as linear systems,
452
Mechatronics
Fortunately, a non-linear system may often exhibit linear behavior over a specified
range of inputs and hence can be adequately approximated using a linear model
over this range; a process known as linearization in dynamic system response.
By varying the values of V and M, itis possible to examine in some detail different
orders of dynamic systems.
13.4 Zero-order systems
A zero-order dynamic system is obtained by setting N=_M=0 in Equation 13.1
This leads to the following equation:
AoXou = BoXine (13.2)
leading to
B
Nout =" Nig = Hin, 133)
xz (13.3)
where as we have already discussed in amplifiers, H is the gain or sensitivity of
the system,
A potentiometer used to measure displacement is 2 typical example of a
zero-order dynamic system, where the output is related to the input as follows:
Ry = (4), =
You = Bes (x0 HX, (3.4)
where Rp is the maximum resistance of the potentiometer, Ry is the current
resistance of the wiper position, and L is the maximum amount of wiper travel
13.5 First-order systems
A first-order dynamic system is obtained by setting N=1 and M=0 in
Equation 13.1. This leads to the following equation:
Ay S88 Ay Xa = Bo Xing (13.5)
ad
leading to
ArdXou By
a Xou =F
Ay dt a
again, as we have already discussed in amplifiers, H is the gain or sensitivity of
the system,
in = HXiny (13.6)
Control theory: analysis 453
‘The ratio on the right-hand side of Equation 13.6 is known as the time
constant:
A
. (37)
Consequently the first-order equation becomes
Aon py
rapt Xow = AXin (13.8)
‘There are several input models such as step, impulse, and sinusoidal
functions. Let us apply the step function, although any of the other types could
bbe considered. The mathematical expression for a step function is
0 1<0
"lay 20° we
with the initial condition being
Xoxl0) =O. (13.10)
‘The standard approach to solving linear differential equations is to assume
a solution of the form
ous = Cel aay
It is an easy matter to show that the characteristic equation (considering
only the left-hand side of Equation 13.8) is given as
+10. (3.12)
2):
Noun, = CO" (3.13)
‘We also now have the particular or steady state solution (considering only
the left-hand side of Equation 13.8) to be:
Kou
And the homogenous or transient solution is (since 2=
Haig 3.14)
‘The general solution (considering both Equation 13.13 and Equation 13.14)
becomes:
out) = Kou, + Xoaty = COM + Any (3.15)
which when we apply the initial condition of Equation 13.15 becomes
Xous(0) =
C+ HA (3.16)
C- HAs, agin),
454
Mechatronics
leading to
Xou(0) = HAyg(l — e*, 03.18)
A monostable vibrator (one-shot) containing @ capacitor, used to generate
4 one-shot pulse is a typical example of a first-order dynamic system. Indeed,
most RC circuits are first-order dynamic systems.
Let us approach the first-order systems from the point of view of transfer
functions. For the first order system, G(s)=aj(s-+a), and considering the input
of a unit step, where (3) = I/a, the output becomes
(9) = ROG) 13.19)
1) = ROG) = (13.19)
‘The inverse Laplace transform for the step response gives
c(t) = at) + en) = 1 =e (13.20)
Figure 13.3 shows the plot of Equation 1
the origin generated the forced response, (0)
the natural response ¢4(t)= =<"
When = La,
20. Notice that the input pole at
= 1, and the system pole at —a,
037 (03.21)
eta] 0.37 = 0.63 (03.22)
Figure 133 Fintorder gsiem response (0 @ unit sep input
Control theory: analysis _455
Equations 13.20, 13.21, and 13.22 form the basis for the definition of the
three transient response performance specifications: time constant, rise time, and
settling time.
= The time constant, I/a, is the time for e~“ to decay to 37% of its
initial value or the time it takes the step response {0 rise to 63% of its final
value.
= The rise time, T,, is the time for the waveform to go from 0.1 to 0.9 of its
final value, This is the same as letting ()=0.9 and 0.1, respectively, and
solving for time, t, which gives
231 01
T=
(13.23)
= The settling time, 7;, is the time for the response to reach, and stay
within, 2% of its final value. This is the same as letting e(1)=0.98 and
solving for time, 1, which gives
n=4 (13.24)
13.6 Second-order systems
este ‘or A second-order dynamic system is obtained by setting N=2 and M=0 in
‘eshienal material Equation 13.1. There are several responses that we need to consider: overdamped,
eee. te 9 underdamped, undamped, and eritially-damped.
13.6.1 An overdamped response
Let us consider for this system that the input is a step function R(s)=/s
and that,
5 Is
60) = SETH (13.240)
Concentrating on the denominator and finding the roots, we have
Tet) 2 =A TAS)
2 (13.248)
= -754£642=-1.077 or ~ 13.922
456_ Mechatronics
leading to
w= Is 1s 5
CO=SE FISHIN AGT LOTS FISID) 1525)
The pole at the origin comes from the unit step input and two real poles
come from the system. The input pole results in a constant forced response, while
cach of the (wo system poles on the real axis generate an exponential natural
response, the frequency of which is equal to the pole location, Hence,
cht) = Ky + Kye Kye (13.26)
13.6.2 An underdamped response
Let us consider for this system that the input is a step function RG)= l/s
and that,
15
Fray
Concentrating on the denominator and finding the roots, we have
Gs)
(13.264)
= ($4 VSE=TRTB)2 = FAO 5.20685 (15.268)
leading to
15 15
CO FETS IS) — NE TIS = LICH FES + DIR (32
(0 = Ki +o (Ky cos 2.958 + Ky sin 2.9581) (13.28)
13.6.3 An undamped response
Let us consider for this system that the input is a step function R(s)=1/s
and that,
15,
wy
Concentrating on the denominator and finding the roots, we have
v1, (13.288)
Gs) = (13.284)
Control theory: analysis _457
leading to
15, x
60 = 5 (13.280)
(= 1- cos VTS (1329)
13.6.4 A critically-damped response
Let us consider for this system that the input is a step function R(9)=1/s
and that
=a 1329)
9 = Fis +25) (3.298
Concentrating on the denominator and finding the roots, we have s =
(vice), leading to
cs) = (13.298)
e+
e(t) = 1 = Se (13,30)
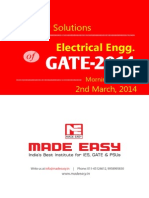
Figure 13.4 shows undamped, underdamped, and overdamped second-order
systems.
13.7 General second-order transfer function
‘The general second order transfer function takes the form
(3.31)
‘The roots of the denominator are
saa (tan VRP STR) /2=—to,toy/F=T (1532
-veral damping cases arise from Equation 13.32 and these are summarized
in Table 13.1
458 Mechatronics
=
1 >|
Poses
Step Gain overdamped
|] 5
Fissne
underdamped Scope
ze
@
o
Figure 13.4 The undamped, undewlampad, and overdamped responses fora step Input.
EXAMPLE
13.1
EXAMPLE
13.2
Control theory: analysis _459
Table 13.1 Damping cases foe second-order sjstem
case Expression Description
ro to, Undamped
Underdamped
dest tio TE ™
CCritcaly-damped
Overdamped
For the transfer function given, determine the values of ¢ and a:
64
FFer8 (13.324)
Gs) =
Solution
Comparing the given transfer function and Equation 13.31, we find that
wo? = 64
_ (13.328)
= VG
Also, 2» = 6, 80
6
pyr 0ts
Categorize the following transfer functions as underdamped, critically
damped, or overdamped.
16
FF 10s+16
(13.320)
© G6)
O60 =a HG
Solution
(@) Comparing the given transfer function and Equation 13.31, we find
thats a? =25, $0 w_ = 5. Also, 2f0, = 10, so ¢=1, implying critical
damping,
460
Mechatronics
(b) Comparing the given transfer function and Equation 13.31, we find
that «,? = 36, s0 wp = 6. Also, 2¢, = 10, so ¢ = 0.833, implying under-
damping,
(© Comparing the given transfer function and Equation 13.31, we find
that o,? = 16, 50.) =4. Also, 2g = 10, so ¢= 1.25, implying over-
damping,
13.7.1 Underdamped second-order systems
Underdamping is often encountered in physical problems, so let us consider the
step response, R(s)= Ijs, for the general second-order system.
Cs) = ROG) = 13.33)
(= ROG) Mons tor) (33)
leading to
a) (13.34)
For the underdamped case, where the poles are at
tiovT=F, (1335)
using partial fraction method, we have
(+ bon) + Goo
<4 ——_ 7 (13.354)
5 (P+ kon) ten%(1 — 2°)
Taking the Laplace transform gives the following result,
oe ~e( os con T= Ft gigi /T=F)
(13.36)
= 1 phget'( cosmovI=Fr— 8),
where
(13.364)
137.41
13742
Control theory: analysis _461
We now define four other parameters associated with the underdamped
response for the second-order system, These parameters are rise time, peak time,
percentage overshoot, and settling time.
Rise time
The rise time, T;, is the time for the waveform to go from 0.1 10 0.9 of its
final value. This is the same as letting e(1)=0.9 and 0.1, respectively, and solving
for apf. Subtracting the 1Wo values of of gives us the normalized rise time,
wT, for a given damping ratio, ¢. Solving Equation 13,36 for these conditions
is ‘difficult and hence the use of a computer is advisable, Table 13.2 shows the
normalized rise time for values of damping ratios. We shall see later how to use
these values to determine rise time.
Peak time
‘The peak time, Tp, is the time required to reach the first, or maximum, peak,
Itis obtained by differentiating Equation 13.36 with respect to time and equating
the differential to zero, then solving for the time.
a= HH sin cig T= Ft = 0 (13.37)
(13.38)
Table 13.2 Normalized rise time
f T
01 ro
02 203
03 ma
a4 4653
os a8
06 est
0 2108
08 2467
09 2883
462 Mechatronics
yielding (for
(13.39)
13.7.1.3 Percentage overshoot
The percentage overshoot, %0S, is the amount that the waveform overshoots the
steady-state, or final, value at the peak time, expressed as a percentage of the
steady-state value.
0 = Sst — Sos 5 199, 03.40)
Cha
‘The maximum value, dpa (when 1=7;) is substituted in Equation 13.36,
Since the maximum value of cosine is 1, then
te le/ Y=) 3.41)
Cmax = (Tp
We take cfu = 1 for a unit step, and then obtain the expression for pereentage
overshoot as
mos = (Y=) 5 100 (03.42)
Since the percentage overshoot is a function of the damping factor, it is
possible to express the damping factor in terms of the percentage overshoot
from Equation 13.42. Rearranging, we got
eles] VR) _ 408
0 (13.43)
‘Taking the log of both sides of this equation yields
tn /V1=@ = In), 03.44)
Squaring both sides of the equation gives
fi (13.45)
(13.46)
Notice that we have included a negative sign to cater for 2, which is normally
less than 1.
Control theory: analysis 463
13.7.1.4 Settling time
‘The settling time, 7,, is the time for the response to reach, and stay within, 2%
of its final value. This is the same as letting c(t) =0.98 and solving for time, ¢
In other words,
(1349)
(13.48)
For the range of 0.1¢<09, we can approximate the numerator of
Equation 13.48 as 4 since it varies between 3.92 and 4.74, hence
a4 1349)
Fay, ‘ Z
EXAMPLE For the transfer function
133
4 150
G9 = (9.494)
determine: (a) the peak time; (b) the percentage overshoot; (c) the settling time;
and (d) the rise time.
Solution
oy = VT3O = 12.2474
+o 20 (13.498)
Foe TaD TATE = 08165 (underdamped),
(a) The peak time is
a 13.49¢
onJl= 122474VT— 0816S (BPO)
(b) The percentage overshoot is
mos =e (lv 7) x 100 = exp( SAS %100.= 1.176, (13.490)
VT 08165
464
Mechatronics
Fasingt
Figure 13.5 A woond:
(©) The settling time
4 4
Yon O8T6S x 12.2474
(@)_ The rise time is obtained using ¢=0.8165 in Table 13.2, for which the
normalized rise time is T-=2.5s (by interpolation) and the actual rise time
4s (13.49)
r
i 25
ay T2284
204s. (13.49)
Consequently, for the underdamped second-order system, we can obtain
peak time, percentage overshoot, settling time, and rise time without plots.
AS an illustration of the second-order dynamic system, let us consider
Figure 13.5, which is a mechanical mass-spring-damper system, This is a forced
damped vibration system since the applied force is not natural but it has an
amplitude and follows a sinusoidal waveform,
The governing differential equation is:
mi = ~kx — fic+ Fr sing. (13.50)
We define
s2eo=F ad
m=z (13.51)
We now rewrite Equation 13.50 as
+ 2408+ ox = FA sn gt (13.52)
Control theory: analysis 465
leading to
E+ ax-+ ote =o? yq singe (13.53)
Let us define
poofimt (13.54)
Then for this class of problem, we choose a complementary function
(transient solution) of the form
xg = Csingt + Evos qt (13.55)
Hence applying Equation 13.55 to Equation 13.53 we have
—P Csingt — @ Ecos gt + 2gay Ceosgt
03.56
— 2aglisin gt + a*Csin gt + a? Ecos gt = oq sin gt
We can now equate terms for sine and cosine accordingly:
sin: PC 2ogh + C= 07ym «3s
cos : PE + wg + a (13.58)
Hence,
= PC ~ Boge = ym 3.59)
ogC +(e? —P)E=0. (13.60)
From Equation 13.6, we have
=2tage
161
ea wey
Substituting in Equation 13.59, we now have
(0? C4 2g TE = oy (13.62)
Consequently, from Equation 13.62 the expressions for C and E are
obtained as
(13.63)
466
Mechatronics
| (3.6
‘The general solution PI, obtained by substituting Equations 13.63 and 13.64
into Equation 13.55 becomes
(-24.9)0?yq cost ;
lie a+ 74] ee
@)sin gt — 2¢004 60s qi, (13.66)
J sinat—v)} (13.67)
Finally, we have
yn sin(gt —
PI (13.68)
(13.69)
and then the phasor:
=H
We now plot the frequency response of the second-order system as a
function of the damping ratio ¢ as shown in Figure 13.6, When the input frequency,
4g, is equal to the natural frequency « (jc. g/@=1) resonance occurs. We note
from Equation 13.69 that when ¢=0 (no damping), the amplitude ratio is
Control theory: analysis _467
Increasing amplitude ratio
Figure 13.6 Second-order sysem amplitude response
13.7.1.5. The maximum amplitude ratio
The maximum amplitude ratio is obtained by taking the squares of both
sides of Equation 13,52, differentiating the denominator with respect to w and
equating to zero:
é
afl-€ wom
leading to
4c = oyT=2E_ at resonance (13.2)
But
paoyT=F, hence o> p> a asa)
We can now obtain the maximum value of the amplitude ratio from
Equations 13.72 and 13.69 as
1 1
2WO-P)
Hesax =
(13.73)
ti == 2¢5)7+ 4220 — 2¢2)}
468
Mechatronics
This maximum value together with the frequency ratio, g/o=1, give 1/2
and help us to draw the graph of the amplitude ratio, 4, against the frequency
ratio, gla.
Although we have successfully determined the frequency response, the method
is unwieldy. Not only that, it is difficult to know what form of solution to
assume, We now present the Operator D-Method, which is very user friendly,
13.7.2 Operator-D method
In this method, we use the following notations
f=D'y, $= Dx; singr= te (13.73)
Let us restart from Equation 13.53, which is reproduced below:
£ + Bot + utr =r yp sing. (13.738)
Applying the Operator-D notations, we have
(D? + 2gwD + 07x =o Yule (13.74)
We can immediately write the general solution PI as:
Pl=x Teh (13.75)
“DF yeds
(13.76)
) — 2togie* am
+ 4F are]
P) — 2gagi)(cos gt +
Tart 13.78)
— ay aoe] ‘
Vial (w — g*) sin gt — 2¢a9 cos gi] (13.79)
[oe -@F + aera]
Control theory: analysis _469
and
ya sin(gt = V) Yo sin(gt = ¥)
[or =F +4e0@?]
Plox= (13.80)
rove |S] easy
which is exactly the same solution as with the previous method. As demon-
strated using this example, the Operator-D method is quite powerful and takes
‘a much shorter time to analysis the response equation,
EXAMPLE A mass of 25g is suspended from a spring with stiffness $00 000 N m=!
13.4 ‘The damping is negligible, The mass is initially resting in its equilibrium
position when a fluctuating force of amplitude 10000N and frequency
100 rads” is suddenly applied to it. Determine:
(a) the amplitude of the steady state vibration; and
(b) the arbitrary constants.
Sketch the displacement-time curve for the first few cycles of the oscillation.
Solution
‘The system is represented in Figure 13.7.
‘The governing differential equation is given as:
mi = kx + Fy sin gt
. (381A)
(&+0")x = 0'yp sings
V_ | F1t)= 10000 singt
Figure 13.7 Sytem for Frample 1
470
Mechatronics
Applying the Operator-D notation, we have
(D’+.0%)x=ayalne™ (1381B)
Equating the left-hand side to zero and solving for D, we obtain the
complementary function:
(D'+0) =0
D=+io. (13.810)
Hence xy = A sin wt + Boos.
We can immediately write the general solution PI as:
Pax = rah
x= Ip Bolt
PEA
_ tart ralo? — @o
[=]
Jae? Yalu? — @ (cos gt + j singe)
(13.81D)
ya sin gt
Hence, x= Asinot + Beoswr +28 S0a
CF ]e
= 1412 rad
Control theory: analysis 471
This value is at steady-state condition,
Using the equation for the final equation for displacement, at time 10,
Xo=0, hence B=0.
$= 0d cos of —oB sin ot + PE
OF 7]0)
Oat ¢ =O since the system is resting at equilibrium position initially
on
O04 TK Ba
ala -vi/i ;
A= Gaga = Tae = Ve (1381E)
Resulting in
swsingt (sgn ot0or _-VBsin
or 2as24t_,(asington—VEsinst2x)—(a81F
where yn =0.02 (as already calculated) This equation describes the response of
the dynamic system being considered in this example; the equation is used to draw
the graph of x asa function of sin 100r and sin 141.2r with the appropriate
amplitudes,
13.8 Systems modeling and interdisciplinary analogies
An ordinary linear differential equation is known to model any linear system,
relating the output response of the system to the input, whether electrical,
‘mechanical, hydraulic, or thermal. The analogies between these several engineer-
ing disciplines have been developed over time. The mechanical analogy used is
the mobility analogy in which the physical analogies are sacrificed in favor of
creating equivalent mathematical relationships, which hold in network analysis
Table 13.3 summarizes the interdisciplinary analogies that exist between different
systems. Figure 13.8 shows a simple analog mechanical system and a simple
electrical system. Their respective governing differential equations are given in
Equations 13.82 and 13.83, The analogy between these systems is of practical
importance because cach of them can be independently analyzed and substituted
for each system, for example, for a mechanical system, it is now possible to use
the mesh circuit theory to write the governing differential equations.
wep =F
Gedep
sovedgsep °F2) (a) ¥iTI=Y_—_(qwauodu0o asndsip)
Pg} SNeOSIA—AOUESON, ow ywuonsedorg
uid= oy
“ous PML
vird=w 0
dtd 30) 83 9] puoass .u0189N
wid) =o 0 mipr=z Baw wouodwos fej)
‘souruoey ‘epiou jo suauow jog epsauy 9ysseyy——souRFIMPL wow 8
ase so
La) doup suns. [wz ‘onbiog, Isla eu0g—[A]4‘simoa, Biqeurs jeusiog
A-2umoy ——waupsedap sauy wouroexdr (Patra suouaoeidsic,
[.-sp2) “p09 sepstoy
aun
jroupevoay suet jeune e
re3Ueypari
seriojeus Samuydospiway EEL o1geL
Di wo ln=
naa
“ona
“apes wot
‘doo=99
‘sounds pay
ora
use
nk
= 4 suosts
[eweysoat
vone03 jo am puoaag,
f= 8 sey
surues aupds
ruopio1= py 2
ed
wae
wee
04 st sons
10 Sytuav0y
ons
sxdound
sunquary.P
waS=x
suowsoeysie
(soups) wesu09
duude—onps fy
m0] 3400 fi
a
Woibi= a ‘ious renwore
Ihur="9 s8iou9 onoure
iwlara 0d) somo
0= (enu08)
1961 doo 8019
oy asta 0= Wo
OHH ssn] apoujuonsuny
bmi =
sam Sayan 1910
"apumovde
474 Mechatronics
4 le
an. aa
Figure 13.8 Analog mechanieal and cecrcal gsm
(m3) + kx) + foxy) am = 0
(13.82)
(msiz + axa) — ham = 0
(Lah + 1/Cin + Cami) — 1/C2g2 = 0
(13.83)
(Lain + Cag) — 1/Caqi = 0.
13.9 Stability
Stability is the most important system specification. An unstable system cannot
be designed for a specific transient response or steady-state error requirement.
There are many definitions for stability, depending upon the type of system or
the point of view. In this section we limit ourselves to linear, time-invariant
systems,
We have already discussed that we can control the output of system if
the steady-state response consists of only the forced response. But the total
response of a system is the sum of the forced and natural responses, or
(0) = crores) + Camu. (13.84)
13.9.1
13.9.2
13.9.3
Control theory: analysis _ 475
‘We now present the following definitions of stability, instability, and marginal
stability
Stable systems
Let us focus on the natural response definitions of stability. Recall from our
study of system poles that poles in the left half-plane (Ihp) yield either pure
exponential decay or damped sinusoidal natural responses. These natural responses
decay to zero as time approaches infinity, Thus, if the closed-loop system poles
are in the left half of the s-plane and hence have a negative real part, the system
is stable. That is, stable systems have closed-loop transfer functions with poles
only in the left half-plane. Here are some definitions of stable systems:
= A linear, time-invariant system is stable if the natural response approaches
zero as time approaches infinity
= A system is stable if every bounded input yields a bounded output
Unstable systems
Poles in the right half-plane (rhp) yield either pure exponentially increasing
or exponentially increasing sinusoidal natural responses. These natural responses
approach infinity as time approaches infinity. Thus, if the closed-loop system
poles are in the right half of the s-plane and hence have a positive real part,
the system is unstable. Also, poles of multiplicity greater than one on the imagi-
nary axis lead to the sum of responses of the form AP" cos(w! +9), where n=1
2,..., which also approaches infinity as time approaches infinity. Thus, unstable
systems have closed-loop transfer funetions with at least one pole in the right
half-plane andjor poles of multiplicity greater than one on the imaginary axis,
Here are some definitions of unstable systems
= A linear, time-invariant system is unstable if the natural response grows
without bound as time approaches infinity.
=A system is unstable if any bounded input yields an unbounded output,
Marginally stable systems
A system that has imaginary axis poles of multiplicity 1 yields pure sinusoidal
oscillations as a natural response. These responses neither inerease nor decrease in
amplitude. Thus, marginally stable systems have closed-loop transfer functions
Mechatronics
with only imaginary axis poles of multiplicity | and poles in the left half-plane.
Here is a definition of « marginally stable system:
ar, time-invariant system is marginally stable if the natural response
neither decays nor grows but remains constant or oscillates as time
approaches infinity
13.10 The Routh-Hurwitz stability criterion
The Routh-Hurwitz stability criterion for stability is a method that yields stabi-
lity information without the need to solve for the closed-loop system poles.
Using this method, we can determine how many closed-loop system poles
are in the left half-plane, in the right half-plane and on the jo-axis. An impor-
tant observation is that we say how many, not where, We can determine the
number of poles in each section of the s-plane, but we cannot find their exact
coordinates,
The method requires two steps:
1. Generate a data table called a Routh-rable.
2. Interpret the Routh table to tell how many closed-loop system poles are
in the left half-plane, the right half-plane, and on the jo-axis.
13.10.1 Generating a Routh table
Referring to the equivalent closed-loop transfer function shown in Figure 13.9,
‘we focus our attention on the denominator since we are interested in the system
poles, First create the Routh table shown in Table 13.4, We commence by label-
ing the rows with powers of s from the highest power of the denominator of the
closed-loop transfer function to s°. Next start with the coefficient of the highest
power of s in the denominator and list, horizontally in the first row, every other
coefficient. In the second row, list horizontally, starting the next highest power
of s, every coefficient that was skipped in the first row. The remaining entries are
filled in as follows. Each entry is a negative determinant of entries in the previous
Ms) os)
ays + agst + ays? + aps? + ays + ay
Figure 13.9 A closed loop transfer fetion,
EXAMPLE
135
Control theory: analysis _477
Table 13.4 Initial template for Routh table
Table 135 Completed Rovth table
‘two rows divided by the entry in the first column directly above the calculated
row. The left-hand column of the determinant is always the first column of the
previous swo rows, and the right-hand column is the elements of the column
above and to the right. The table is complete when all of the rows are completed
down to s°, Table 13.5 is the completed Routh table for Figure 13.9.
Generate the Routh table for the system shown in Figure 13.10,
Solution
‘The first step is to find the equivalent closed-loop system because we want
to test the denominator of this function, not the given forward transfer function,
for pole location. Using the Feedback formula, we obtain the equivalent system as
Figure 13.10(b), We will apply the Routh-Hurwitz criterion to the denominator,
(649s? + 26s-+81). First label the rows with powers of s from s* down to sin
478 Mechatronics
13.10.2
Re) + Els ois)
1) ) 7
(s+ 2)s+3(5+4)
@
Als) —>| 57 Ly» ow
ry Bae + 265481
Figure 13.10 Closed Joop transfer function for Example 133,
Table 13.6 Completed Routh table for Example 13.8
? v
2 or
Ls
a vertical column, as shown in Table 13.6. Next form the first row of the table,
using the coefficients of the denominator of the closed-loop transfer function,
We commence with the coefficient of the highest power and skip every
other power of s. We now form the second row with the coefficients of the
denominator skipped in the previous step. Subsequent rows are formed with
determinants as shown,
For convenience any row of the Routh table can be multiplied by a positive
constant without changing the values of the rows below. This can be proved
by examining the expressions for the entries and verifying that any multiplicative
constant from a previous row cancels out. In the second row of Table 13.6, for
example, the row was multiplied by 1/9. We see later that care must be taken not
to multiply the row by a negative constant
Interpreting a Routh table
The basic Routh table applies to systems with poles in the left and right half-
planes, Systems with imaginary poles (and the kind of Routh table that results)
Control theory: analysis _479
will be discussed in the next section. Simply stated, the Routh-Hurwitz criterion
declares that the number of roots of the polynomial that are in the right half-plane
is equal to the number of sign changes in the first column.
If the closed-loop transfer function has all poles in the left half of the s-plane,
the system is stable. Thus, a system is stable if there are no sign changes in the first
column of the Routh table, For example, Table 13.6 has two sign changes in the
first column, Thus, the system of Figure 13.10 is stable since no poles exist in the
right half-plane
Now that we have described how to generate and interpret a Routh table, let us
ook at two special cases that can arise.
13.10.2.1 Zero only in the first column
If the first element of a row is zero, division by zero would be required to form
the next row. Two methods are normally used: (a) the epsilon method; and (b) the
reciprocal-roots method.
In the first method, to avoid this zero-row phenomenon, an epsilon, e, is
assigned to replace the zero in the first column. The value of ¢ is then allowed to
approach zero from cither the positive or the negative side, after which the signs of
the entries in the first column can be determined.
In the second method, we show that the polynomial we are looking for, the
‘one with the reciprocal roots, as simply the original polynomial with its coefficients
written in reverse order, For example,
Sb gas + 4 ays-+dg = 0 (13.85)
If s is replaced by 1/d, then 4 will have roots which are the reciprocal of s.
Making this substitution gives,
(13.86)
Factoring out (6)
[eG
(Q) [lt ajaid-t.. tad"! + ayd"] =0. 13.87
(13.864)
480_ Mechatronics
Table 13.7 Pastial Routh table for Fxample 13.6
* a aos @
Thus, the polynomial with reciprocal roots is a polynomial with the coefficient
written in reverse order.
EXAMPLE Determine the stability of the closed-loop transfer function
13.6 5
See webste for dow Ts) = (13.88)
Fie Tiss lO OFS
‘oacabie VATLAB code
te sae this prebiem
Solution
Filling the first two rows of the Routh table gives Table 13.7, Here the pivot
for the third row contains a zero. So we form a polynomial with its coefficients
written in the reverse order,
First write a polynomial that is the reciprocal roots of the denominator of
Equation (13.88). This polynomial is formed by writing the denominator in
reverse order. Hence,
PO = TEER EO SPELT
(13.89)
We form the Routh table as shown in Table 13.8 using Equation 13.89.
Since there are (wo sign changes, the system is unstable and has two right-half
plane poles. Notice that Table 13.8 does not have a zero in the first column,
13,10,2.2. Entire row is zero
We now look at the second special case. Sometimes while making a Routh table,
we find that an entire row consists of zeros because there is an even polynomial
that is a factor of the original polynomial. This case must be handled differently
from the case of a zero in only the first column of a row. Let us look at an
example that demonstrates how to construct and interpret the Routh table when an
entire row of zeros is present.
EXAMPLE Determine the number of right-half plane poles in the closed-loop transfer
137 function
30.
1) = (13.90)
Fos 30
Control theory: analysis _481
Table 13.8 Completed Rovth table for Example 13.6
° @2 2
* 6 1
6s
333066
ce
’ 333 06
sat
a
s 3811
ozs of
‘0218
Table 13.9 Partisl Routh table for Example 13.7
= 1 5 6
s 6 5s 60)6
° °
1s 16
log 1 élag
Solution
Start by forming the Routh table for the denominator of Equation 13.90
(see Table 13.9). In the second-row we multiply through by 1/5 for convenience.
We stop at the third row, since the entire row consists of zeros, and use the
following procedure.
First we return to the row immediately above the row of zeros and form an
auxiliary polynomial, using the entries in that row as coefficients, The polynomial
will start with the power of s in the label column and continue by skipping every
other power of s. Thus, the polynomial formed for this example is
+584
Ps) (391)
482_ Mechatronics
13.10.3
EXAMPLE
138
See webste for dow
Table 13.10 Completed Routh table for Fxample 13.7
r 1s
- eI =25
* 25 6
ae 78
[Next we differentiate the polynomial with respect to s and obtain
Ps) =4s' + 10540. (13.92)
Finally, we use the coefficients of Equation 13.92 to replace the row of
zeros, Again, for convenience the third row is multiplied by 1/4 afler replacing the
The remainder of the table is formed in a straightforward manner by follow-
ing the standard form shown in Table 13.10 which shows that all entries in the
first column are positive, Hence, there are no right-half plane poles
Stability design using the Routh-Hurwitz criterion
Find the gain range, K (assume K>0) for the system shown in
Figure 13.11 to cause the system to be: (a) stable; (b) unstable; and
(©) marginally stable.
acacia VATLAB code
1a sae this prebiem
Solution
The first step is to find the equivalent closed-loop system because we want
(o apply the Routh-Hurwitz criterion to the denominator (s° +158 +50s-+K)
of this function, not the given forward transfer function, for pole location,
First label the rows with powers of s from s° down to sin a vertical column, as
Control theory: analysis 483
Fis) +A ls) K a)
S(5+5){5+ 10)
Figure 13.41 A gem to be amined lor sabi fn Example 1h
Table 13.11 Completed Routh tabi
for example 13.8
° fi 30
: 1 50] °
isk] 30:
shown in Table 13.11, Next form the first row of the table, using the coefficients of
the denominator of the closed-loop transfer function,
T= ss
+ 15s? + 3084 K 13.93)
‘We consider the three possible cases.
= K> 750: All clements in first column are positive except the row s!
‘There are two sign changes showing that the system is unstable,
= K<0: All elements in first column are positive and there is no sign
change showing that the system is stable, with three poles in the lefl-
halfplane.
= K=750: We have an entire row of zeros, which signify jo poles.
Let us explore the last case further. First we return to the row immedi=
ately above the row of zeros and form an auxiliary polynomial, using the entries in
that row as coefficients, The polynomial will start with the power of s in the label
column and continue by skipping every other power of s. Thus, the polynomial
formed for this example is
Ps) = 158 +750, (1394)
Next we different
te the polynomial with respect to s and obtain
Pls) = 305-+0 (13.95)
484 Mechatronics
13.11
13.111
atta
Table 13.12 Completed Routh table for Fxample 138 with K=750
1 0
sy (750) 50
0 °
ee
sa °
Finally, we use the coefficients of Equation 13.95 to replace the row of zeros.
For convenience we multiply the second row entries by 1/15.
The remainder of the table (Table 13.12) is formed in a straightforward
manner by following the standard form. Since there is no sign change from the
even polynomial, s°, down to the bottom of the table, the even polynomial has
its two roots on the ja-axis of unit multiplicity. The system is therefore marginally
stable.
Steady-state errors
The steady-state error is the difference between the input and the output for
a prescribed test input as ¢> 0c. Since we are concerned with steady-state
ertor afier the steady state has been reached our discussions are limited to stable
systems, where the natural response approaches zero as 1» 0. The control
engineer must first check that the system is stable while performing steady-state
error analysis and design,
Steady-state error for unity feedback systems
The steady-state error can be calculated from either a system's close-loop
transfer function, 7(s), or the open-loop transfer function, G(s), for a unity
feedback system. Let us deal with these two cases,
‘Steady-state error in terms of T(s)
Consider the feedback control system shown in Figure 13.12(a)
K(s) = R(9) - CO). (13.96)
Control theory: analysis 485
Aisle FS) as)
Gs)
©)
Figure 13.42 Steady-state error.) in tenns of (9B) in terms oF OG.
But
CW) = REIT), (13.97)
hence
Els) = R66) — R()T3) = RSI = TEs). (13.98)
From the final value theorem,
e(00) = lim e(#) = lim sE(0. (13.984)
EXAMPLE For a unit step input, and closed-loop transfer function,
139
1) =>-4 (13.988)
ore
determine the steady-state error of the system,
Solution
os 4th 6s44
RO) =H = Sere HOES
1H)
You might also like
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5809)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (346)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (843)
- instaPDF - in Hanuman Chalisa Telugu 271Document11 pagesinstaPDF - in Hanuman Chalisa Telugu 271qqaqqNo ratings yet
- A B C D: UGC NET November 2020 Paper-1Document12 pagesA B C D: UGC NET November 2020 Paper-1qqaqqNo ratings yet
- Pratah SandhyavandanamDocument16 pagesPratah SandhyavandanamqqaqqNo ratings yet
- Sepic Converter PDFDocument13 pagesSepic Converter PDFqqaqqNo ratings yet
- Laboratory Investigation On Stone Matrix Asphalt Using Pineapple Fiber and Coir FiberDocument5 pagesLaboratory Investigation On Stone Matrix Asphalt Using Pineapple Fiber and Coir FiberqqaqqNo ratings yet
- Design of Sensor Less Induction Machine Drive Operate With SVPWM & EstimationDocument1 pageDesign of Sensor Less Induction Machine Drive Operate With SVPWM & EstimationqqaqqNo ratings yet
- The Andhra Pradesh Gazette: Part Iv-B Extraordinary Published by AuthorityDocument5 pagesThe Andhra Pradesh Gazette: Part Iv-B Extraordinary Published by AuthorityqqaqqNo ratings yet
- 3000 Solved Problems in Electric Circuits SchaumsDocument768 pages3000 Solved Problems in Electric Circuits Schaumsedward davidNo ratings yet
- DebugDocument11 pagesDebugqqaqqNo ratings yet
- GATE 2014 Electrical Engineering Keys & Solution On 2nd March (Morning Session)Document23 pagesGATE 2014 Electrical Engineering Keys & Solution On 2nd March (Morning Session)Lokesh KumarNo ratings yet
- Recover UbuntuDocument1 pageRecover UbuntuqqaqqNo ratings yet