Professional Documents
Culture Documents
1999 - Guler Et Al. - Masurement of Particle Movement in Granular Soils Using Image Analysis
1999 - Guler Et Al. - Masurement of Particle Movement in Granular Soils Using Image Analysis
Uploaded by
Júlia Hein MazuttiOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
1999 - Guler Et Al. - Masurement of Particle Movement in Granular Soils Using Image Analysis
1999 - Guler Et Al. - Masurement of Particle Movement in Granular Soils Using Image Analysis
Uploaded by
Júlia Hein MazuttiCopyright:
Available Formats
MEASUREMENT OF PARTICLE MOVEMENT IN GRANULAR SOILS USING
IMAGE ANALYSIS
By Murat Guler,1 Tuncer B. Edil,2 and Peter J. Bosscher3
ABSTRACT: The flowing behavior of granular soils in the form of localized deformations and shear bands is
a difficult phenomenon to define explicitly in the modeling of soil-structure interface problems. However, for
Downloaded from ascelibrary.org by UFRGS - Universidade Federal do Rio Grande do Sul on 07/15/16. Copyright ASCE. For personal use only; all rights reserved.
development of accurate numerical solutions for these problems, an estimation of particle movements is impor-
tant in determining the nature of displacement fields within the granular media. Video images from direct shear
tests were used to capture the movement of individual grains relative to the movement of a ribbed structural
surface. Two different algorithms have been developed to determine particle displacements in an image sequence
of the interface during a direct shear test. BMAD employs a block-matching algorithm using unit patterns of
images to determine two-dimensional particle displacement vectors. MATCH, on the other hand, computes
displacements based on centroid locations of segmented particles that are matched using a four-level filter
algorithm in successive image frames. Measured hardware dependent noise was reduced during image acquisition
by means of a frame averaging technique implemented in BMAD. BMAD was successfully employed to deter-
mine particle displacements in Ottawa sand images obtained during shearing on a ribbed surface. The results
were verified with MATCH using the same image frames.
INTRODUCTION ber of digital images involving small-sized particles needs to
be analyzed, because the user defines particle centroids.
Soil-structure interface behavior is known to have control-
Hryciw and his associates (Hryciw and Raschke 1996; Hry-
ling effects on the load-carrying capacities of deep founda-
ciw et al. 1996) developed two different analysis tools, Tracker
tions, soil nails, reinforced earth structures, etc. Design of
and Tracer, to study particle deformations occurring under
these structures is typically based on the ultimate load-carrying
rapid and quasi-static conditions. They used an edge detection
capacity criterion and on highly empirical relations that are
algorithm in Tracker to segment particle groups that could be
not specific to soil-structure interface properties. To better un-
tracked through the entire image sequence. Centroid locations
derstand the nature of the problem, there have been increasing
attempts to model the granular soil-structure interface behavior of the selected particles computed for each frame are used to
using particle-level information. The objective of this approach determine particle displacements. To analyze rapid particle
is to account for the critical parameters of the soil-structure translations in a flowing media, they developed Tracer, which
interface behavior and ultimately to refine the design methods constructs trajectories of colored particles by applying logical
of these structures. The analysis of granular soil behavior at ‘‘or’’ operations to a number of image frames. Using a mor-
the particle level calls for using more sophisticated techniques phological thinning operation, particle paths in the recorded
to describe and quantify the fundamental parameters of particle images are transformed into lines through which the centroid
behavior. location of each trace particle translates during the test. The
Some progress has been made on the application of image thinned images are then analyzed, and similar data to that of
analysis techniques in geomechanics. Donohoe and Bacobella Tracker is produced for the displacements of the trace parti-
(1991) proposed a particle tracking technique using polar edge cles. Due to the difficulty in segmenting overlapped particle
maps of segmented particles. They placed sand particles in a groups, Tracker was only able to analyze individual particles
vessel and subjected them to a vertical pressure as the se- that could be detected throughout the test. Crossing of the
quence of images was recorded. Their method segments im- traces among the colored particles produced a similar overlap-
ages using an edge detection algorithm and generates polar ping problem for Tracer that made the analysis of individual
edge map histograms for each particle based on an average particle traces difficult. Tracking individual particles using ei-
diameter defined by the user. The algorithm then links the ther of these approaches permits only a limited number of
incomplete particle boundaries corresponding to the peaks particles to be analyzed in the entire period of test duration.
within the edge histograms. Particles in the entire image se- Similar work has also been presented by Gustafsson and
quence are matched based on statistical correlations, and the Gustafsson (1996), in which the movement of granular parti-
translations, i.e., the difference between centroid locations, are cles in a circular container were analyzed by tracing particle
computed for each matched particle. Their method is most trajectories in a series of images. To differentiate between par-
useful in applications in which image acquisition is performed ticle sizes, each group was colored differently. Images are con-
at higher magnifications and when only a few number of tinuously acquired during the test. Particles of equal sizes
frames are required for the detection of particle translations. (with the same color) are separated using thresholding tech-
Apparently, the proposed method is tedious when a large num- niques. Trajectories of particles that represent the flow paths
of the selected particle groups are constructed by subtracting
1
Grad. Student, Dept. of Civ. and Envir. Engrg., Univ. of Wisconsin- successive image frames from each other. The limited number
Madison, Madison, WI 53706. of available gray levels and crossing of particle trajectories
2
Prof., Dept. of Civ. and Envir. Engrg., Univ. of Wisconsin-Madison,
Madison, WI.
reduce the number of tracked particles to be analyzed, as in
3
Prof., Dept. of Civ. and Envir. Engrg., Univ. of Wisconsin-Madison, the method of Hryciw et al. (1996).
Madison, WI. For studying the movement of fine granular soils, Gustafs-
Note. Discussion open until September 1, 1999. To extend the closing son and Marklund (1995) suggested counting the number of
date one month, a written request must be filed with the ASCE Manager particle passages for each pixel in an image frame rather than
of Journals. The manuscript for this paper was submitted for review and particle edges for large sized granular soils. They determined
possible publication on December 18, 1998. This paper is part of the
Journal of Computing in Civil Engineering, Vol. 13, No. 2, April, 1999. the maximum particle velocity in terms of pixel and particle
䉷ASCE, ISSN 0887-3801/99/0002-0116 – 0122/$8.00 ⫹ $.50 per page. size for the accurate number of particle passages. The sug-
Paper No. 19830. gested method, however, requires a large number of image
116 / JOURNAL OF COMPUTING IN CIVIL ENGINEERING / APRIL 1999
J. Comput. Civ. Eng., 1999, 13(2): 116-122
frames with long test durations to reduce the error resulting
from variations in the grayscale of pixels.
The method presented in this paper describes two rapid au-
tomated techniques to determine particle displacements with-
out requiring significant user effort and judgment, using typ-
ical hardware and image acquisition tools that are commonly
employed in practical image analysis and processing problems
(Guler 1997). BMAD was adapted from the Moving Picture
Expert Group (M.P.E.G.), the ISO standard for digital video
applications, which employs a block-based matching algorithm
Downloaded from ascelibrary.org by UFRGS - Universidade Federal do Rio Grande do Sul on 07/15/16. Copyright ASCE. For personal use only; all rights reserved.
to analyze displacements between image frames. In this FIG. 2. Parameters Used in Minimum Absolute Difference Cri-
terion
method, groups of pixels rather than particles are used for the
matching operation. MATCH, on the other hand, employs
four-level filtering algorithms to match previously analyzed of the pixel values between two sequential image frames.
colored sand particles dispersed in the particulate media. Re- There are three factors that may control the performance of
sults of both algorithms are compared using Ottawa sand par- the method: the matching criterion, the search strategy, and the
ticles during an interface shear test, and the performance of macro block size (Tekalp 1995), as discussed in detail in the
the block-based matching method with an added frame aver- subsequent sections. Fig. 1 illustrates the input parameters for
aging algorithm is verified with the results of MATCH, an the method. The macro block is a block of pixels used to
object matching algorithm. match in the successive image, the size of which is predeter-
mined with respect to the average size of objects within those
PARTICLE MOTION ESTIMATION THROUGH BLOCK images. It is required to define an integer number of macro
MATCHING METHOD — BMAD blocks where the image horizontal and vertical resolutions are
divided by the macro block horizontal and vertical sizes, re-
Block-based matching is a widely used method in industrial spectively. The side length, on the other hand, can be any
applications because of its moderate hardware requirements as value, depending on the estimated magnitude of motion be-
well as the ease of implementations in complex motion detec- tween successive frames.
tion and pattern recognition problems. It is the accepted mo-
tion estimation and compensation method of the Moving Pic- Matching Criterion
ture Expert Group, a section of the International Organization
for Standardization (ISO), working on digital video image op- There are different matching criteria defined for block
timization techniques. The principal assumption in this method matching methods, depending on the type of application. Be-
is that small patterns of pixel blocks can be tracked from one cause of computational simplicity, the minimum absolute dif-
image to the next and that their movement is directly related ference criterion MAD is considered the most effective search-
to the movement of particles contained in the pixel block. Fun- ing criteria. The MAD can be defined as follows:
damentally, the method employs a searching algorithm to find
the best match of a pixel block taken from the reference frame
to pixel blocks in the next frame. The method applies only to
MAD(d1, d2) = 冘 兩 p(xk, yk) ⫺ p(xk⫹1 ⫹ d1, yk⫹1 ⫹ d2)兩 (1a)
&1, d
(d &2) = arg min MAD(d1, d2) (1b)
translational motion estimation, not rotational motion. How-
ever, more sophisticated algorithms using the same approach where & d1, &
d2 = displacements in the horizontal and vertical
exist to account for rotating objects. Because the search range directions, respectively, corresponding to the minimum of the
for blocks is determined by a distance criterion, typically sum of the absolute differences, MAD, for the current macro
known as a ‘‘search window,’’ block-based matching is also block; p(xk, yk) = gray scale pixel values at xk, yk location
called a ‘‘spatial domain search approach.’’ within the current macro block in frame k; and p(xk⫹1 ⫹ d1,
The block matching method that was employed in this study yk⫹1 ⫹ d2) = gray scale pixel values at xk⫹1 ⫹ d1, yk⫹1 ⫹ d2 in
is a subalgorithm of the M.P.E.G. II based on the minimum frame k ⫹ 1, as seen in Fig. 2.
absolute difference-matching criterion. The best motion vector
is computed by searching for the minimum absolute difference
Search Strategy
To find the best matching macro block in the closest prox-
imity relative to its original position in the reference frame, a
spiral searching path was implemented in the algorithm. The
search starts from the center of the search window, seeking
the best matching macro block in the current frame by scan-
ning through all the pixels within the search window, as illus-
trated in Fig. 3. As the macro block travels within this search
range in the current frame, the absolute difference of each
pixel grayscale value is computed for each possible position.
At the end of this process, a motion vector is drawn starting
from its original position in the reference frame to the current
position in the current frame where the minimum of the com-
puted absolute differences is found, i.e., when (1) is satisfied.
Using this strategy, however, may not reflect the actual dis-
placement vectors in the corners and the sides of the image
frames because of the constrained motion of the macro blocks
within the search window. This condition is also shown in Fig.
3. Considering this limitation, it is recommended that the dis-
FIG. 1. Geometrical Parameters Used in Block-Based Match- placement fields at these regions be evaluated with the neigh-
ing Method borhood displacement vectors computed in the vicinity of
JOURNAL OF COMPUTING IN CIVIL ENGINEERING / APRIL 1999 / 117
J. Comput. Civ. Eng., 1999, 13(2): 116-122
is essential to define a macro block size that can cover on
average an entire particle for which the spectrum of pixel gray-
scale is usually high. This strategy becomes even more im-
portant for low contrast images in which pixel grayscale values
have relatively uniform distributions. The algorithm developed
for BMAD allows the user to define a different macro block
vertical size than its horizontal size to obtain the best geo-
metric fit for the particle geometry.
Description of Algorithm Built Into BMAD
Downloaded from ascelibrary.org by UFRGS - Universidade Federal do Rio Grande do Sul on 07/15/16. Copyright ASCE. For personal use only; all rights reserved.
The required input parameters for the algorithm are refer-
ence frame, current frame, assigned macro block vertical and
horizontal dimensions, and side length, as previously defined.
The number of searches for each pair of image frames is es-
FIG. 3. Search Path within Search Window for Different Posi- sentially the total number of macro blocks, which is computed
tions of Macro Blocks by dividing the area of the image frame by the area of the
defined macro block. The searching operation is started within
these fields. One solution suggested for this drawback is the current frame at the location of the first macro block on a
stretching the image frame to carry the searching operation out spiral search path, as illustrated in Fig. 3. Each motion vec-
of the frame and then transforming it into its original size after tor that satisfies the minimum absolute difference criterion is
the operation is completed. However, the computed motion referenced to the first pixel location in the center point of the
vectors in these locations were found to be less important in search window and calculated based on the distance away
terms of the characterization of particle flows than the interior from the starting point (i.e., the center pixel of search win-
motion vectors, and this approach was not implemented in the dow). In the meantime, as the computation of motion vectors
algorithm of BMAD. proceeds, the boundary locations of macro blocks are exam-
Determination of the search window size was performed by ined to determine whether they remain within the current
evaluating the algorithm performance based on four test pa- frame region. This subroutine is added to the algorithm to
rameters: the actual magnification that corresponds to the cur- control the searching process in the image frame corner and
rent resolution in the direction of motion; the image resolution the boundary positions due to the constrained search regions,
in the direction of motion; the displacement rate at which mo- as indicated in Fig. 3. For each pixel within the search range,
tion takes place; and the time interval between image frames the absolute difference is also computed and updated based on
or the frequency of image acquisition. The search window size comparison with its previous value. These operations are re-
can be estimated using the following equations: peated for every pixel within the search window to determine
the minimum absolute difference without exceeding the frame
1 boundaries. The final motion vector is then computed for the
m= (2)
MR current macro block based on its original position and the last
pixel point where the minimum absolute difference was found.
s
T= (3) This closed loop, shown by the solid frame in Fig. 4, is run
t as many times as the number of macro blocks before the al-
T gorithm proceeds to the next pair of frames in the recorded
Minimum Side Length = (4) series of images. In each new operation of the algorithm, the
m current frame in the previous run is used as the reference frame
where mmi = millimeters in image; mma = millimeters in ac- while the next frame is assigned to the status of current frame.
tual size; M = actual magnification corresponding to the cur- The main steps followed in the algorithm are shown in Fig.
rent resolution of the image in the direction of motion (mmi / 4. The output data is the horizontal and vertical components
mma); R = image resolution in the direction of motion (pixel/ of the displacement vectors for each pair of successive image
mmi); m = actual pixel size relative to actual magnification frames.
(mma /pixel); T = total translation difference between image The main routine of BMAD was written in the C⫹⫹ pro-
frames (mma /image); s = displacement rate at which the mo- gramming language by modifying the standard subroutine of
tion takes place (mma /s); and t = frequency at which image the M.P.E.G. II. The compiled version of the algorithm was
frames are captured (image/s). then transformed into a LabVIEW virtual instrument (VI) us-
Eqs. (2) – (4) can be used to prevent excessive computations ing the advanced Code Interface Node (CIN) feature, which
during the analysis. It should be noted that the displacement establishes the necessary interface to user-defined applications.
rate used in (3) corresponds to the overall velocity, such as LabVIEW (LabVIEW 1994) is a graphical programming soft-
the shear box velocity in an interface shear test, rather than ware that enables users to easily design interface programs for
the particle velocity within the box. The particle velocity is various applications by assembling graphical objects in a block
generally equal to or lower than the box velocity; however, in diagram form. Advanced analysis libraries from data acquisi-
some cases, such as in loose soil, particles may translate faster tion to data analysis with mathematical and statistical tool-
than the box within the same time interval, and thus the pre- boxes can be added to user-defined programs to build appli-
dicted side length may not reflect the actual translations for cations. The flexibility of LabVIEW in generating user-specific
these particles. It is therefore recommended that the side length objects also provides control over the image acquisition phase.
be chosen at least 3 – 5 pixels larger than the computed side An IMAQ PCI 1408 image acquisition board was controlled
length using (4). with a LabVIEW generated application that was combined
with BMAD to generate a interface program that could be used
Determination of Macro Block Size for image analysis as well as image acquisition. Depending on
the displacement rate of the shear device, BMAD is able to
Because the matching criterion is based on the pixel gray- perform real-time analysis on the captured frames using larger
scale rather than the spatial characteristics of image frames, it macro block sizes. With a 200 MHz PC, this approach put
118 / JOURNAL OF COMPUTING IN CIVIL ENGINEERING / APRIL 1999
J. Comput. Civ. Eng., 1999, 13(2): 116-122
matically matching the marker particles that are being tracked
sequentially between the image frames.
To reduce the overlapping, dark marker particles were dis-
persed into the interface region where the successive image
frames were captured. A foundry sand was used because of its
homogeneous black color that makes it easy to differentiate in
a digital display even if it is mixed with other granular ma-
terials. The foundry sand had a grain shape and size similar
to that of the Ottawa sand used in the test. Because segmen-
tation by the thresholding technique was used in the analysis
Downloaded from ascelibrary.org by UFRGS - Universidade Federal do Rio Grande do Sul on 07/15/16. Copyright ASCE. For personal use only; all rights reserved.
of frames, the use of the foundry sand particles was mandatory
to generate the necessary contrast relative to the background
particles. An edge detection algorithm, which is another com-
monly used method for segmentation, could be considered an-
other approach to overcome the overlapping problem without
using the dark sand particles; however, the algorithm yields
boundary discontinuities generated at low contrast regions
where the boundary pixel intensities are not sufficiently dif-
ferentiable. The analysis of image frames was performed using
the digital image analysis and processing software Global Lab
Image (GLOBAL 1994), which employs the thresholding seg-
mentation technique. Each frame was analyzed, and particle
centroids and orientations relative to the horizontal axis were
recorded into a data file. MATCH was then used to calculate
the translations and the rotations of the segmented particles for
every successive frame. Even though rotations can be calcu-
lated using MATCH, they are limited to only in-plane motions
and are not discussed in detail here.
Computation of Particle Displacements
Particle displacements were computed based on the center
point coordinates of the areas of the particles generated by the
image analysis and processing software, Global Lab Image.
Particle displacements defined in MATCH can be given by the
following equation:
⌬X = Xn,k⫹1 ⫺ Xm,k; ⌬Y = Yn,k⫹1 ⫺ Ym,k (5a,b)
where ⌬X and ⌬Y = displacements in the X and Y directions,
respectively; and n and m indicate the particle numbers in
FIG. 4. Main Steps in Algorithm of BMAD frame k and frame k ⫹ 1, respectively.
significant limitations on the number of frames acquired and Description of Algorithm Built Into MATCH
processed per second and the selection of the suitable macro MATCH was developed in the Matlab environment in text
block size, even though the IMAQ PCI 1408 has an acquisi- format, having subfiles for the analysis of the input data as
tion rate of 30 frames/s. This restriction was eliminated by well as the presentation of the results. Matlab (Student 1995)
first saving all necessary image frames onto a disk and sub- is a powerful programming language oriented to scientific
sequently analyzing them. This allowed the selection of vari- computation using data elements in matrix form. A sketch of
ous image acquisition rates and macro block sizes for the var- the filtering algorithms for MATCH is given in Fig. 5. As
ious tests conducted at different displacement rates. indicated in the figure, there are four levels of filter algorithms
built to match particles between two sequentially acquired im-
ALTERNATIVE METHOD FOR PARTICLE TRACKING — ages. In the first-level filter, particles are matched based on a
MATCH minimum translation criterion. This criterion is defined as the
particles in the previous frame that match the particles in the
Considering that granular particles are accumulations of next frame having the smallest translation relative to the pre-
rigid particle groups, their motions under loading conditions vious frame. The results of this operation are described in Fig.
can be regarded as coupled rotations and translations within 6 as matching particle 1 with particle 5, particle 2 with particle
the media, unless the loading conditions lead to significant 5, particle 3 with void 8, and void 4 with void 7. Because of
particle deformation or breakage. Based on this observation, the overlapping problem in the image frames, some particles
the displacement fields of granular particles were determined may be lost in the next frame, and the first-level filter may
using digital image analysis techniques on the captured image result in some particles in the previous frame that were
frames in a certain time interval. To track individual particles matched with only one particle in the next frame. This con-
using this method requires determining the particle centroid dition is also shown in Fig. 6 as the matching of particle 2
locations. Particle overlapping can cause tracked particles to with particle 5 even though particle 2 is further away relative
be temporarily hidden between successive images. This situ- to particle 5 as compared with the location of particle 1. This
ation requires significant effort from the user to ‘‘find’’ the discrepancy is eliminated using the second-level filter based
‘‘lost’’ particle in the subsequent images. The algorithm de- on the results of the first-level filter. Because the regions be-
veloped for MATCH is, on the other hand, capable of auto- tween particles (voids) are also defined as particles in the anal-
JOURNAL OF COMPUTING IN CIVIL ENGINEERING / APRIL 1999 / 119
J. Comput. Civ. Eng., 1999, 13(2): 116-122
Downloaded from ascelibrary.org by UFRGS - Universidade Federal do Rio Grande do Sul on 07/15/16. Copyright ASCE. For personal use only; all rights reserved.
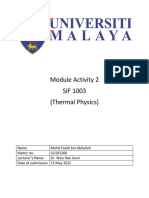
FIG. 7. Image of Ottawa Sand in Contact with Steel Plate
centroids using Global Lab Image. The particle translations
were then calculated by MATCH and the results were plotted
FIG. 5. Filtering Algorithms in Track
as shown in Fig. 8. The same image frames were also analyzed
by BMAD using 12 ⫻ 16, 24 ⫻ 32, and 48 ⫻ 32 macro block
sizes and an optimal 10-pixel side length that corresponds to
a 10 ⫻ 10 pixels search area, computed based on (4). The best
fitting macro block size was found to be 24 ⫻ 32, based on
the visual comparison of the selected macro block size with
the average particle size in the frames. The calculated results
for this macro block are shown on the same plots in Fig. 8 to
compare the results obtained from MATCH using the same
image frames.
The results for both algorithms show agreement in the mag-
FIG. 6. Implementation of Algorithms on Two Schematic Im- nitude as well as the direction of the translations for all of the
ages analyzed image frames. It should be noted that both algorithms
detected the local particle displacements with consistency in
ysis phase, it is required to eliminate particle-void or void- their magnitudes as well as directions. This implies a high
void matching combinations from the results of the first- as sensitivity of the algorithms to rapid local changes within the
well as the second-level filtering operations. This is achieved displacement fields, which is of primary importance in under-
by two additional filters applied to the resultant data obtained standing the flow behavior of granular materials. The displace-
from the first- and second-level filters (Guler 1997). ment patterns shown in Fig. 8 appear to be in excellent agree-
Comparison of both algorithms was made on Ottawa sand ment with similar work reported by Hryciw and Irsyam
particles in a modified direct shear test. Ottawa sand has a (1993).
quartz crystalline structure that is nearly transparent under The results from both methods indicate that the magnitudes
lighting, which makes detection of particles difficult during of the displacement vectors close to the interface zone seem
image analysis, unlike dark marker particles. The accuracy of to be larger relative to the locations away from the interface.
the block-based matching technique, therefore, was measured The vertical distributions of the vertical and horizontal dis-
and evaluated at very non-uniform grayscale distribution im- placements within the sand adjacent to the structure interface
ages. The use of the marker sand would significantly increase are shown by plotting the average horizontal particle displace-
the contrast; however, in terms of testing the generality of the ments computed at macro block locations for all captured im-
technique for use with different granular materials without any age frames in Fig. 9. It is apparent that the horizontal particle
manual effort and laboratory manipulations, it was decided to displacements increase from the sand specimen top down to
use Ottawa sand. Image acquisition was performed using a the interface zone, conforming to the expected relative differ-
high magnification zoom microscope camera at 640 ⫻ 480 ences in displacement fields within the shear box. The vertical
resolution and a rate of 1 frame per 5 seconds. The displace- components, however, show smaller translations in magnitude
ment rate for the shear device was adjusted to 1.2 mm/min. and tend to decrease in the interface region. This plot can be
An interface plate that was machined with a 45⬚ sawtooth pat- used to evaluate displacement fields for different granular ma-
tern having a peak-to-peak distance of 1 mm was placed into terials and the effect of particle texture, shape, and size char-
the shear box and leveled with the bottom horizontal side of acteristics as well as structural surface characteristics such as
the image frames so that a clear view of particles could be roughness can be investigated at different displacement rates
obtained during the image acquisition. An example of an im- and loading conditions. The noticeable differences in the re-
age frame acquired during the test is shown in Fig. 7. Prior to sults of the algorithms are due to the fact that the translations
the image analysis, an edge detection algorithm was applied in the block matching method can only be represented by in-
to detect particle boundaries. This operation was necessary, teger numbers (i.e., the number of pixels), whereas the results
because the thresholding technique is quite limited for particle obtained on particle basis analysis can be fractions, which are
segmentation especially for translucent Ottawa particles. The essentially calculated from the first-order moments of particle
discontinuities on the particle boundaries were manually com- areas. On the other hand, higher accuracy in the results of
pleted and the image analysis was performed to obtain particle BMAD could be obtained by increasing the number of frames
120 / JOURNAL OF COMPUTING IN CIVIL ENGINEERING / APRIL 1999
J. Comput. Civ. Eng., 1999, 13(2): 116-122
Downloaded from ascelibrary.org by UFRGS - Universidade Federal do Rio Grande do Sul on 07/15/16. Copyright ASCE. For personal use only; all rights reserved.
FIG. 8. Calculated Displacement Vectors for Image Frame Shown in Fig. 7 (10 Times Scaled Displacement Vectors for Visual Clarity)
captured per second that can eliminate the effects of accu- lighting conditions because of the difficulty in the seg-
mulated noise and other test variables between frames. The mentation process. However, it can be efficiently used by
noise generated from the hardware system as well as the light- spreading dark sand particles, e.g., foundry sand parti-
ing conditions were measured to be around 6 pixel grayscale cles, at the interface region to help detect displacement
levels (out of 256 pixel gray-scale levels) during the image fields. Dark foundry sand particles are easily distinguish-
acquisition. Using the frame averaging technique, it was re- able from the other granular materials and produce high
duced to 2 gray-scale levels before recording the image contrast in digital images that can minimize the manual
frames. However, the generated displacement vectors using the work for the restoration of boundary discontinuities prior
block-based matching method were successful in capturing to the image analysis. Although this method of particle
rapid deformations with an acceptable bias. tracking is reliable, only a limited number of particles
can be analyzed due to significant loss resulting from the
CONCLUSIONS overlapping problem.
Determination of particle displacements by means of the 2. BMAD is fairly effective and efficient in analysis of im-
digital image analysis techniques was investigated using two age frames without rigorous hardware requirements. It
different approaches: the particle matching analysis with does not include manual modification of already captured
MATCH and the block-based matching method implemented frames, and the algorithm use is fully computerized,
in BMAD. Both algorithms were tested and evaluated in terms which speeds up the acquisition, analysis, and presenta-
of their efficiency, accuracy, and practicality in the study of tion of the results. In addition, the algorithm is capable
particle displacements using sequences of images of deforming of detecting particle displacements nearly equivalent to
Ottawa sand particles. The following observations can be the particle segmentation technique, provided that the re-
made in terms of the developed methods: quired input parameters (macro block size and search
window) are defined appropriately. The measurement of
1. The algorithm for MATCH, based on the particle seg- noise in the acquisition system showed that the lighting
mentation technique, may not be practical at low contrast condition and hardware system can produce a certain
images produced by granular materials having transpar- range of change in the pixel intensity levels, which may
ent crystalline structures (e.g., Ottawa sand) or poor affect the accuracy of results that are generated by the
JOURNAL OF COMPUTING IN CIVIL ENGINEERING / APRIL 1999 / 121
J. Comput. Civ. Eng., 1999, 13(2): 116-122
Downloaded from ascelibrary.org by UFRGS - Universidade Federal do Rio Grande do Sul on 07/15/16. Copyright ASCE. For personal use only; all rights reserved.
FIG. 9. Distribution of Average Horizontal and Vertical Displacements for Image Frame Shown in Fig. 7
block-based matching method at high noise levels. In this methods in studying soil characteristics,’’ MS thesis, Civ. and Envir.
case, the frame-averaging technique can be employed to Engrg. Dept., University of Wisconsin-Madison, Madison, Wis.
Gustafsson, L., and Gustafsson, P. (1996). ‘‘Studying mixed granular
reduce the noise for the stability of the analysis results. flows by image analysis.’’ Proc., 11th Conf., ASCE Engrg. Mechanics
Div., ASCE, Reston, Va., 100 – 103.
ACKNOWLEDGMENTS Gustafsson, L., and Marklund, O. (1995). ‘‘Image analysis of fine grain
granular flow.’’ Proc., 10th Conf., ASCE Engrg. Mechanics Div.,
This research was performed with financial support from the National ASCE, Reston, Va., 614 – 617.
Science Foundation Grant CMS-9302281 and U.S. Air Force Office of Hryciw, R. D., and Raschke, S. A. (1996). ‘‘Development of computer
Scientific Research Grant MIPR-93-0031. The Turkish Ministry of Na- vision technique for in situ soil characterization.’’ Transp. Res. Rec.
tional Education provided financial support to the first writer. The con- 1526, Transportation Research Board, Washington, D.C., 86 – 97.
tributions of Mr. Seyfullah Oguz and Mr. Keith Ligler are also gratefully Hryciw, R. D., Raschke, S. A., and Donohoe, G. W. (1996). ‘‘Microde-
acknowledged. formations in sands by digital image processing and analysis.’’ Transp.
Res. Rec. 1548, Transportation Research Board, Washington, D.C.,
APPENDIX. REFERENCES 31 – 37.
Hryciw, R. D., and Irsyam, M. (1993). ‘‘Behavior of sand particles around
Donohoe, G. W., and Bocabella, M. F. (1991). ‘‘Segmentation and object rigid ribbed inclusions during shear.’’ Soils and Found., 33(3), 1 – 13.
tracking for the microstructure analysis of soil.’’ IEEE, 1 – 2(2), LabVIEW威 for Windows tutorial. (1994). National Instruments Corpora-
1215 – 1219. tion, Austin, Tex.
GLOBAL LAB IMAGE娃 user manual. (1994). 5th Ed., Data Translation Student edition of MATLAB威 Version 4 user’s guide. (1995). Prentice
Inc., Marlboro, Mass. Hall, Englewood Cliffs, N.J.
Guler, M. (1997). ‘‘Applications of digital image analysis and processing Tekalp, A. M. (1995). Digital video processing. Prentice Hall, New York.
122 / JOURNAL OF COMPUTING IN CIVIL ENGINEERING / APRIL 1999
J. Comput. Civ. Eng., 1999, 13(2): 116-122
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5810)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Master Collections of Interview Questions For Sap SDDocument50 pagesMaster Collections of Interview Questions For Sap SDsmohapatra001100% (16)
- The Tools of Argument How The Best LawyersDocument1 pageThe Tools of Argument How The Best LawyersTaga Bukid100% (1)
- 2019 - Ragni Et Al. - Observations of The Effects of A Clay Layer On Suction Bucket Intallation in SandDocument55 pages2019 - Ragni Et Al. - Observations of The Effects of A Clay Layer On Suction Bucket Intallation in SandJúlia Hein MazuttiNo ratings yet
- 2019 - Ragni Et Al. - Observations During Suction Bucket Installation in SandDocument18 pages2019 - Ragni Et Al. - Observations During Suction Bucket Installation in SandJúlia Hein MazuttiNo ratings yet
- 2011 - Saiyar Et Al - Validation of Boundary PIV Measurements of Soil-Pipe InteractionDocument10 pages2011 - Saiyar Et Al - Validation of Boundary PIV Measurements of Soil-Pipe InteractionJúlia Hein MazuttiNo ratings yet
- Holeyman-Whenham2017 - Article - CriticalReviewOfTheHypervib1MoDocument19 pagesHoleyman-Whenham2017 - Article - CriticalReviewOfTheHypervib1MoJúlia Hein MazuttiNo ratings yet
- Tension Tests On Smooth and Rough Model Piles in Dry SandDocument8 pagesTension Tests On Smooth and Rough Model Piles in Dry SandJúlia Hein MazuttiNo ratings yet
- 1Document4 pages1Rakesh RakiNo ratings yet
- L3 Advanced Word Processing SkillsDocument25 pagesL3 Advanced Word Processing SkillsCHING, BARON ALIJAH L.No ratings yet
- Social Networks As Inauthentic SocialityDocument23 pagesSocial Networks As Inauthentic SocialityMarcelo Vial RoeheNo ratings yet
- Festo Grafcet PDFDocument34 pagesFesto Grafcet PDFAnonymous UdyvGlT8mNo ratings yet
- STA Host Interface Manual PDFDocument84 pagesSTA Host Interface Manual PDFhellangel1088No ratings yet
- Computer Management Assistant 21-09Document7 pagesComputer Management Assistant 21-09calvin mavakiseNo ratings yet
- Venkat M +1 443-985-3655 Java Software EngineerDocument4 pagesVenkat M +1 443-985-3655 Java Software Engineerraju chNo ratings yet
- Assign3 LassoDocument3 pagesAssign3 LassoChelsi GondaliaNo ratings yet
- ULI-224-Series DS (05sept2023) 20230907173502Document7 pagesULI-224-Series DS (05sept2023) 20230907173502PERABNo ratings yet
- 60 Questions OMR SheetDocument1 page60 Questions OMR SheetMohammad SajjadNo ratings yet
- Digi Connectport X2Document3 pagesDigi Connectport X2Jose Luis Altamirano SotoNo ratings yet
- TGH Data Breach Complaint - Filed Version 8.4.23Document36 pagesTGH Data Breach Complaint - Filed Version 8.4.23ABC Action NewsNo ratings yet
- Mountdebug - 2023 07 10 21 44 20Document5 pagesMountdebug - 2023 07 10 21 44 20Xarus XarusNo ratings yet
- PRT Pcdmis 2018r1 Portable Manual PDFDocument238 pagesPRT Pcdmis 2018r1 Portable Manual PDFvitor moreira domeniciNo ratings yet
- 3D COLOR CS 3600 Intraoral Scanner CarestreamDocument3 pages3D COLOR CS 3600 Intraoral Scanner CarestreamasfasfNo ratings yet
- Whirlpool Europe Spreadsheet Supplement TVI 1Document6 pagesWhirlpool Europe Spreadsheet Supplement TVI 1Mousumi GuhaNo ratings yet
- Marine Control Unit (Mcu)Document1 pageMarine Control Unit (Mcu)Oktay KESKİNKILIÇNo ratings yet
- SYM Starter U02 ReadingWorksheetsDocument4 pagesSYM Starter U02 ReadingWorksheetsCarolinaNo ratings yet
- High Authority Social Profile BacklinksDocument1 pageHigh Authority Social Profile BacklinksGulam Robbani SrkshazuNo ratings yet
- Model MRP: Samsung B7620Document19 pagesModel MRP: Samsung B7620Rajni MenonNo ratings yet
- Introduction To LabVIEW 8Document88 pagesIntroduction To LabVIEW 8nemzinhoNo ratings yet
- GC28-6991-02a Service Guide For 2461 Support Element (Base Service)Document230 pagesGC28-6991-02a Service Guide For 2461 Support Element (Base Service)Carrillo ApartamentoNo ratings yet
- Detailed Lesson Plan in MathematicsDocument5 pagesDetailed Lesson Plan in MathematicsAzh Zel100% (1)
- Lenovo AMD Radeon 520 2GB GDDR5 Dual DP Graphics Card With LP Bracket - Graphics Cards - Part Number - 4X60Y70140 - Lenovo CanadaDocument7 pagesLenovo AMD Radeon 520 2GB GDDR5 Dual DP Graphics Card With LP Bracket - Graphics Cards - Part Number - 4X60Y70140 - Lenovo CanadarayNo ratings yet
- Module Activity 2 - U2103268Document7 pagesModule Activity 2 - U2103268Taylor JammiesonNo ratings yet
- Using Microsoft Excel To Edit .DBF Tables: ProjectdbfaddinDocument2 pagesUsing Microsoft Excel To Edit .DBF Tables: ProjectdbfaddinMehak FatimaNo ratings yet
- Guidebook 8 Things Engineers Should Know About Thermal ImagingDocument12 pagesGuidebook 8 Things Engineers Should Know About Thermal ImagingShami MudunkotuwaNo ratings yet
- InDesign Tutorial 2019Document18 pagesInDesign Tutorial 2019dotu12No ratings yet