You might also like
- Accident Analysis and Prevention: SciencedirectDocument12 pagesAccident Analysis and Prevention: SciencedirectJuan Pablo GMNo ratings yet
- Transportation Research Part C: Shun Yang, Wenshuo Wang, Yuande Jiang, Jian Wu, Sumin Zhang, Weiwen Deng TDocument15 pagesTransportation Research Part C: Shun Yang, Wenshuo Wang, Yuande Jiang, Jian Wu, Sumin Zhang, Weiwen Deng Tmfbs8689 awesomeNo ratings yet
- Investigating The Intra-Driver Heterogeneity in Car Following Behaviour Based On Large-Scale Naturalistic Driving StudyDocument22 pagesInvestigating The Intra-Driver Heterogeneity in Car Following Behaviour Based On Large-Scale Naturalistic Driving StudySamarth M.R SamNo ratings yet
- Driver Visual BehaviorDocument11 pagesDriver Visual Behaviormfbs8689 awesomeNo ratings yet
- The Theory of Planned Behavior and Competitive Driving in ChinaDocument10 pagesThe Theory of Planned Behavior and Competitive Driving in ChinaSuvamNo ratings yet
- Smartphone_Inertial_Measurement_Unit_Data_Features_for_Analyzing_Driver_Driving_BehaviorDocument16 pagesSmartphone_Inertial_Measurement_Unit_Data_Features_for_Analyzing_Driver_Driving_BehaviorMpho NetshifhefheNo ratings yet
- NV Rao PaperDocument25 pagesNV Rao PaperjefeenaNo ratings yet
- Accident Analysis and Prevention: Yongfeng Ma, Wenlu Li, Kun Tang, Ziyu Zhang, Shuyan ChenDocument12 pagesAccident Analysis and Prevention: Yongfeng Ma, Wenlu Li, Kun Tang, Ziyu Zhang, Shuyan ChenEnzoNo ratings yet
- An improved automated braking system for rear-end collisions A studyDocument12 pagesAn improved automated braking system for rear-end collisions A studyrosca raulNo ratings yet
- Ports PrelimsDocument7 pagesPorts PrelimsJericho SulaNo ratings yet
- The Role of Drivers' Social Interactions in Their Driving Behavior: Empirical Evidence and Implications For Car-Following and Traffic OwDocument27 pagesThe Role of Drivers' Social Interactions in Their Driving Behavior: Empirical Evidence and Implications For Car-Following and Traffic OwJoão Paulo CabralNo ratings yet
- 2020 (A) Kong AAAP Speeding PatternDocument8 pages2020 (A) Kong AAAP Speeding Patternayissiraoul485No ratings yet
- Transportation Research Part F - Traffic Psychology and Behaviour 2016-Feb Vol. 37Document12 pagesTransportation Research Part F - Traffic Psychology and Behaviour 2016-Feb Vol. 37joel aguilarNo ratings yet
- 2021 Analyzing Driver Behavior Under Naturalistic Driving Conditions - A ReviewDocument21 pages2021 Analyzing Driver Behavior Under Naturalistic Driving Conditions - A Review27051995No ratings yet
- 1 s2.0 S0001457522000252 MainDocument9 pages1 s2.0 S0001457522000252 MainAnh Ngữ ESMARTNo ratings yet
- 1 s2.0 S0001457520305297 Main PDFDocument16 pages1 s2.0 S0001457520305297 Main PDFwahyu rianNo ratings yet
- Sustainability 13 05214Document14 pagesSustainability 13 05214Maggý MöllerNo ratings yet
- A Survey On Trajectory-Prediction Methods For Autonomous DrivingDocument23 pagesA Survey On Trajectory-Prediction Methods For Autonomous DrivingRashmi Chelliah (RA1911026010022)No ratings yet
- J Aap 2020 105923Document15 pagesJ Aap 2020 105923ananda.amatory.mtri23No ratings yet
- Framework For Investigating Individual Older Adults - Driving Behaviours and The Underlying Cognitive Mechanisms - RevisionDocument20 pagesFramework For Investigating Individual Older Adults - Driving Behaviours and The Underlying Cognitive Mechanisms - RevisionNatalia Alarcón NavarroNo ratings yet
- Review and Assessment of Different Perspectives of Vehicle-Pedestrian Conflicts and Crashes: Passive and Active Analysis ApproachesDocument22 pagesReview and Assessment of Different Perspectives of Vehicle-Pedestrian Conflicts and Crashes: Passive and Active Analysis Approachesj toledoNo ratings yet
- Two-Player Game-Theory-Based Analysis of Motorcycle Driver's Behavior at A Signalized IntersectionDocument20 pagesTwo-Player Game-Theory-Based Analysis of Motorcycle Driver's Behavior at A Signalized IntersectionThành Linh TrịnhNo ratings yet
- Transportation Research Interdisciplinary Perspectives: Md. Ebrahim ShaikDocument9 pagesTransportation Research Interdisciplinary Perspectives: Md. Ebrahim ShaikSangeetha NNo ratings yet
- Modeling and Evolving Human Behaviors and Emotions in Road Traffic NetworksDocument11 pagesModeling and Evolving Human Behaviors and Emotions in Road Traffic NetworksMarhadi LeonchiNo ratings yet
- Accident Analysis and Prevention: Loukas Dimitriou, Katerina Stylianou, Mohamed A. Abdel-AtyDocument15 pagesAccident Analysis and Prevention: Loukas Dimitriou, Katerina Stylianou, Mohamed A. Abdel-AtySajid RazaNo ratings yet
- Characterising Driver Heterogeneity Within Stochastic Traffic SimulationDocument20 pagesCharacterising Driver Heterogeneity Within Stochastic Traffic SimulationSamarth M.R SamNo ratings yet
- Lateral Motion Stability Control of Electric Vehicle Via Sampled-Data State Feedback by Almost Disturbance DecouplingDocument29 pagesLateral Motion Stability Control of Electric Vehicle Via Sampled-Data State Feedback by Almost Disturbance DecouplingLuong Ngoc MinhNo ratings yet
- 1 s2.0 S2213665721000038 MainDocument20 pages1 s2.0 S2213665721000038 Mainwahyu rianNo ratings yet
- Modelling and Dynamic Analysis of Adaptive Neuro-FDocument24 pagesModelling and Dynamic Analysis of Adaptive Neuro-FShashank “Necro” ThapaNo ratings yet
- Evin PersonalityTrait2022Document8 pagesEvin PersonalityTrait2022Evin MorganeNo ratings yet
- Driving Style Recognition Based On Electroencephalography Data From A Simulated Driving ExperimentDocument13 pagesDriving Style Recognition Based On Electroencephalography Data From A Simulated Driving ExperimentShdjdjNo ratings yet
- Accident Analysis and Prevention: Pushpa Choudhary, Nagendra R VelagaDocument9 pagesAccident Analysis and Prevention: Pushpa Choudhary, Nagendra R Velagamalaya_mohantyNo ratings yet
- Lane Changing Behavior On Urban Streets A Focus Group Based StudyDocument10 pagesLane Changing Behavior On Urban Streets A Focus Group Based StudyKathlyn Alan NaragNo ratings yet
- Accident Analysis and Prevention: SciencedirectDocument10 pagesAccident Analysis and Prevention: SciencedirectShuaib AhmedNo ratings yet
- Speed Reduction Markings Effective in Driving SimulationDocument9 pagesSpeed Reduction Markings Effective in Driving SimulationTEOH ENG TAT / UPMNo ratings yet
- Automotive 6Document12 pagesAutomotive 6Monikashish JaiswalNo ratings yet
- 4 impDocument9 pages4 impMd.Reza-E- RabbiNo ratings yet
- Sensors: A Comprehensive Survey of Driving Monitoring and Assistance SystemsDocument32 pagesSensors: A Comprehensive Survey of Driving Monitoring and Assistance SystemsPrachi MishraNo ratings yet
- Safety Impacts of Push Button and Countdown Timer On Nonmotorized Traffic at IntersectionsDocument7 pagesSafety Impacts of Push Button and Countdown Timer On Nonmotorized Traffic at IntersectionsADITYA VISHWAKARMANo ratings yet
- Transportation Research B: Yang Zhou, Soyoung Ahn, Meng Wang, Serge HoogendoornDocument19 pagesTransportation Research B: Yang Zhou, Soyoung Ahn, Meng Wang, Serge HoogendoornlaeeeqNo ratings yet
- An Analysis On Older Driver 'S Driving Behavior by GPS Tracking Data: Road Selection, Left/right Turn, and Driving SpeedDocument10 pagesAn Analysis On Older Driver 'S Driving Behavior by GPS Tracking Data: Road Selection, Left/right Turn, and Driving Speedivan felipe erazo ceronNo ratings yet
- Low-Cost Road Marking Measures For Increasing Safety in Horizontal Curves A Driving Simulator Study - Dario Babic, Tom Brijs.Document10 pagesLow-Cost Road Marking Measures For Increasing Safety in Horizontal Curves A Driving Simulator Study - Dario Babic, Tom Brijs.TEOH ENG TAT / UPMNo ratings yet
- Accident Analysis and Prevention: Cong Chen, Guohui Zhang, Ra Fiqul Tarefder, Jianming Ma, Heng Wei, Hongzhi GuanDocument13 pagesAccident Analysis and Prevention: Cong Chen, Guohui Zhang, Ra Fiqul Tarefder, Jianming Ma, Heng Wei, Hongzhi GuanRidwan Bin AlamNo ratings yet
- Is Take-Over Time All That Matters? The Impact of Visual-Cognitive Loadon Driver Take-Over Quality After Conditionally Automated DrivingDocument10 pagesIs Take-Over Time All That Matters? The Impact of Visual-Cognitive Loadon Driver Take-Over Quality After Conditionally Automated DrivingSándor BányaiNo ratings yet
- Noise Level Study Based On Traffic Characteristics, Physical and Environmental Aspects of RoadDocument11 pagesNoise Level Study Based On Traffic Characteristics, Physical and Environmental Aspects of RoadIAEME PublicationNo ratings yet
- The Effect of Speed Limit Pavement Markings On Driving Performance - Hadas Marciano 9 (8 Sep 2022)Document25 pagesThe Effect of Speed Limit Pavement Markings On Driving Performance - Hadas Marciano 9 (8 Sep 2022)TEOH ENG TAT / UPMNo ratings yet
- Constraint-Oriented Integrated Longitudinal and Lateral Robust Control For Connected and Automated Vehicle PlatoonsDocument13 pagesConstraint-Oriented Integrated Longitudinal and Lateral Robust Control For Connected and Automated Vehicle Platoonssamsaptak ghoshNo ratings yet
- IET Intelligent Trans Sys - 2020 - Wang - Longitudinal and Lateral Control of Autonomous Vehicles in Multi Vehicle DrivingDocument13 pagesIET Intelligent Trans Sys - 2020 - Wang - Longitudinal and Lateral Control of Autonomous Vehicles in Multi Vehicle Drivingtensazangetsu691No ratings yet
- 50 - Choudhari2019Document11 pages50 - Choudhari2019alison.pereiraNo ratings yet
- Reading 1 Human Factors in Driving Oppenheim and David ShinarDocument19 pagesReading 1 Human Factors in Driving Oppenheim and David Shinarsemihaomur87No ratings yet
- 12 - The Effectiveness of Average Speed EnforcementDocument12 pages12 - The Effectiveness of Average Speed Enforcementbryanrosie0101No ratings yet
- Traffic Locus of Control, Driving Skills, and Attitudes Towards In-Vehicle Technologies (Isa & Acc)Document10 pagesTraffic Locus of Control, Driving Skills, and Attitudes Towards In-Vehicle Technologies (Isa & Acc)Abby FaizNo ratings yet
- Kaber 2016Document18 pagesKaber 2016Andreea FlorentinaNo ratings yet
- Transportation Research Part C: Jianqiang Wang, Jian Wu, Xunjia Zheng, Daiheng Ni, Keqiang LiDocument19 pagesTransportation Research Part C: Jianqiang Wang, Jian Wu, Xunjia Zheng, Daiheng Ni, Keqiang LiAbhijitNo ratings yet
- Sustainability 12 01971Document12 pagesSustainability 12 01971Vishal MehtaNo ratings yet
- Sustainability DevelopmentDocument12 pagesSustainability DevelopmentVishal MehtaNo ratings yet
- Control ofDocument15 pagesControl ofLuis Alberto Toalombo ToapaxiNo ratings yet
- Unsafety On Two Wheels, or Social Prejudice - Proxying Behavioral Reports On Bicycle and E-Scooter Riding Safety - A Mixed-Methods StudyDocument15 pagesUnsafety On Two Wheels, or Social Prejudice - Proxying Behavioral Reports On Bicycle and E-Scooter Riding Safety - A Mixed-Methods StudyrennyNo ratings yet
- A Modified Extreme Seeking-Based Adaptive Fuzzy Sliding Mode Control Scheme For Vehicle Anti-Lock BrakingDocument25 pagesA Modified Extreme Seeking-Based Adaptive Fuzzy Sliding Mode Control Scheme For Vehicle Anti-Lock BrakingAli AkbarNo ratings yet
- Miss Annas Lathifah RinantiDocument2 pagesMiss Annas Lathifah RinantiArinda RNo ratings yet
- 2 Construction Guidelines For Low Cost Feeder RoadsDocument22 pages2 Construction Guidelines For Low Cost Feeder Roadstilak gahaNo ratings yet
- Triumph Spitfire 1500 (1975 Onwards) Parts CatalogueDocument381 pagesTriumph Spitfire 1500 (1975 Onwards) Parts Cataloguetim ericsson100% (1)
- FORD B-MAX Owner's ManualDocument298 pagesFORD B-MAX Owner's ManualadybosssNo ratings yet
- Maj Concslb 043 0Document3 pagesMaj Concslb 043 0Mohammed JassimNo ratings yet
- Simplex Infrastructures LTD List of Equipment Available For HireDocument1 pageSimplex Infrastructures LTD List of Equipment Available For HireSurajPandeyNo ratings yet
- Tools TRW & TRD For ProcurementDocument9 pagesTools TRW & TRD For ProcurementMohamed BakriNo ratings yet
- T7888 FR DPS So#41715258Document1 pageT7888 FR DPS So#41715258alwanbagasNo ratings yet
- Ozamiz Docx1Document13 pagesOzamiz Docx1Dexter ConstantinoNo ratings yet
- Gulbarga Bus Terminus: Case Study Report OnDocument21 pagesGulbarga Bus Terminus: Case Study Report Onapsab sabNo ratings yet
- Pages From 432912277-Manual-Air-Compresor-Atlas Copco-GA75-2-4Document6 pagesPages From 432912277-Manual-Air-Compresor-Atlas Copco-GA75-2-4Tolias EgwNo ratings yet
- Appendix G - Fuel Consumption CalculationsDocument2 pagesAppendix G - Fuel Consumption CalculationsArse AbiNo ratings yet
- Tanggal Delivery Po No Item NoDocument6 pagesTanggal Delivery Po No Item NoDiah PuspaNo ratings yet
- Ncert Class 9 English CH9Document17 pagesNcert Class 9 English CH9Rollshly Chal Roll Karte haiNo ratings yet
- 291473275Document170 pages291473275Arjun MpNo ratings yet
- OPCO Company Profile and Facilities GuideDocument63 pagesOPCO Company Profile and Facilities Guidevangeliskyriakos8998No ratings yet
- ABT ConfigurationDocument4 pagesABT ConfigurationericfernandrizzNo ratings yet
- Rudder CourseDocument88 pagesRudder CourseMaxwell gonzàlezNo ratings yet
- SONET Accessories Price LIstDocument2 pagesSONET Accessories Price LIstpradeep kumarNo ratings yet
- Cortacesped Tractor LTH1842Document16 pagesCortacesped Tractor LTH1842Diego ChamorroNo ratings yet
- Uber Price Strategies & Marketing Communictaions: BE Assignment-II Group 1Document24 pagesUber Price Strategies & Marketing Communictaions: BE Assignment-II Group 1ayushNo ratings yet
- Safety Drill Evaluvation Report: CommentsDocument2 pagesSafety Drill Evaluvation Report: CommentsAbu Syeed Md. Aurangzeb Al MasumNo ratings yet
- COLREGS RULES FOR AVOIDING COLLISIONSDocument47 pagesCOLREGS RULES FOR AVOIDING COLLISIONSDragos Dragan100% (2)
- 0340 Peinersmagde-21022003-P-Peiner-Greifer-OperatingDocument94 pages0340 Peinersmagde-21022003-P-Peiner-Greifer-OperatingHui ChenNo ratings yet
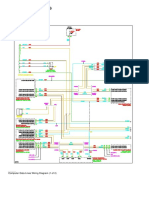
- COMPUTER DATA LINES - Saturn Vue Green Line 2008 - SYSTEM WIRING DIAGRAMSDocument2 pagesCOMPUTER DATA LINES - Saturn Vue Green Line 2008 - SYSTEM WIRING DIAGRAMSFredyNo ratings yet
- Introdcution and Purpose of Fly LevelingDocument3 pagesIntrodcution and Purpose of Fly Levelingteeyuan86% (7)
- Tracer 900 GTDocument84 pagesTracer 900 GTMohamad SyukhairiNo ratings yet
- JoyBus May 26Document2 pagesJoyBus May 26anthonette jonesNo ratings yet
- Steel Structure SafetyDocument23 pagesSteel Structure SafetyMohamed AtefNo ratings yet