You might also like
- Detection of Objects in Motion-A Survey of Video SurveillanceDocument6 pagesDetection of Objects in Motion-A Survey of Video SurveillanceARTHURNo ratings yet
- IJECEDocument12 pagesIJECEEsraa AlaaNo ratings yet
- 14166-Article Text-25243-1-10-20231018Document7 pages14166-Article Text-25243-1-10-20231018ahmedalhaswehNo ratings yet
- Implementation of A Novel Algorithm For Moving Object Tracking in Video SurveillanceDocument9 pagesImplementation of A Novel Algorithm For Moving Object Tracking in Video SurveillancesanjayshelarNo ratings yet
- Suspicious Human Activity Recognition and Alarming SystemDocument11 pagesSuspicious Human Activity Recognition and Alarming SystemIJRASETPublicationsNo ratings yet
- Vision Based Anomalous Human Behaviour Detection Using CNN and Transfer LearningDocument6 pagesVision Based Anomalous Human Behaviour Detection Using CNN and Transfer LearningIJRASETPublicationsNo ratings yet
- Security Application of Computer VisionDocument6 pagesSecurity Application of Computer VisionKirana ShreeNo ratings yet
- Social DistanceDocument18 pagesSocial DistanceBinod AdhikariNo ratings yet
- An Intelligent Motion Detection Using Open CVDocument13 pagesAn Intelligent Motion Detection Using Open CVanshupriya380No ratings yet
- A Comprehensive Review On Advance Surveillance SystemDocument7 pagesA Comprehensive Review On Advance Surveillance SystemIJRASETPublicationsNo ratings yet
- Surveillance Robot For Tracking Multiple Moving TargetsDocument7 pagesSurveillance Robot For Tracking Multiple Moving Targetspurushothaman sinivasanNo ratings yet
- Real-Time Video Violence Detection Using CNNDocument7 pagesReal-Time Video Violence Detection Using CNNIJRASETPublicationsNo ratings yet
- Video Surveillance SystemsDocument9 pagesVideo Surveillance SystemsAmine AminovichNo ratings yet
- p2 PDFDocument14 pagesp2 PDFAhmad UsmanNo ratings yet
- Final2Document14 pagesFinal2Esraa AlaaNo ratings yet
- Implementation of Human Tracking Using Back Propagation AlgorithmDocument4 pagesImplementation of Human Tracking Using Back Propagation Algorithmpurushothaman sinivasanNo ratings yet
- DocumentDocument51 pagesDocumentdileeppatraNo ratings yet
- Publish PaperDocument6 pagesPublish PaperSrinadh ChekuriNo ratings yet
- 1 RVDocument14 pages1 RVEsraa AlaaNo ratings yet
- Suspicious Activity Detection From Video Surveillance Using CNN AlgorithmDocument7 pagesSuspicious Activity Detection From Video Surveillance Using CNN AlgorithmIJRASETPublicationsNo ratings yet
- Review paper-HARDocument3 pagesReview paper-HARJhalak DeyNo ratings yet
- Event-Based Moving Object Detection and TrackingDocument8 pagesEvent-Based Moving Object Detection and TrackingPhoenix GamingNo ratings yet
- Anamolous Behaviour Detection Using Lucas Kanade and Harris Corner DetectorDocument5 pagesAnamolous Behaviour Detection Using Lucas Kanade and Harris Corner DetectorInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Real Time Object Detection With Audio Feedback Using Yolo v3Document4 pagesReal Time Object Detection With Audio Feedback Using Yolo v3Editor IJTSRDNo ratings yet
- Applied Soft Computing Journal: Leiyue Yao, Wei Yang, Wei HuangDocument10 pagesApplied Soft Computing Journal: Leiyue Yao, Wei Yang, Wei HuangFriji RachaNo ratings yet
- Human Fall Detection Using Optical Flow Farne Back PptDocument15 pagesHuman Fall Detection Using Optical Flow Farne Back Pptkandulaanusha20No ratings yet
- Smart Video Surveillance Using YOLO Algorithm and OpenCVDocument8 pagesSmart Video Surveillance Using YOLO Algorithm and OpenCVIJRASETPublications100% (1)
- Abnormal Crowd Detection in Public Places Using OpenCV and Deep LearningDocument6 pagesAbnormal Crowd Detection in Public Places Using OpenCV and Deep LearningIJRASETPublicationsNo ratings yet
- A Neuro-Fuzzy Crime Prediction Model Based On Video AnalysisDocument9 pagesA Neuro-Fuzzy Crime Prediction Model Based On Video AnalysisEsraa AlaaNo ratings yet
- 4 2 Cse499aDocument6 pages4 2 Cse499aAnik Saha Toni 1912619643No ratings yet
- Object Detection Using Deep Learning ApproachDocument9 pagesObject Detection Using Deep Learning ApproachIJRASETPublications100% (1)
- Autonomous Real Time Surveillance SystemDocument4 pagesAutonomous Real Time Surveillance SystemIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNo ratings yet
- Human Activity RecognitionDocument8 pagesHuman Activity RecognitionIJRASETPublicationsNo ratings yet
- A Review On Motion Detection TechniquesDocument5 pagesA Review On Motion Detection TechniquesEditor IJTSRDNo ratings yet
- Feature-Level Based Video Fusion For Object DetectionDocument6 pagesFeature-Level Based Video Fusion For Object Detectionvasece4537577No ratings yet
- A Study On Smart Video Security For Banks Using Mobile Remote ControlDocument4 pagesA Study On Smart Video Security For Banks Using Mobile Remote ControlInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Smart Surveillance System Real-Time Multi-Person Multi-Camera Tracking at The EdgeDocument5 pagesSmart Surveillance System Real-Time Multi-Person Multi-Camera Tracking at The EdgeIJRASETPublicationsNo ratings yet
- Council For Innovative Research: Efficient Motion Detection Algorithm in Video SequencesDocument6 pagesCouncil For Innovative Research: Efficient Motion Detection Algorithm in Video SequencesmelakuNo ratings yet
- Irregular Events Detection in Videos Using Machine Learning TechniquesDocument7 pagesIrregular Events Detection in Videos Using Machine Learning TechniquesIJRASETPublicationsNo ratings yet
- Survey On Human Motion Detection in Static BackgroundDocument3 pagesSurvey On Human Motion Detection in Static BackgroundAJER JOURNALNo ratings yet
- Fin Research PPR PDFDocument10 pagesFin Research PPR PDFKhushi UdasiNo ratings yet
- Signal Processing: D.-N. Truong Cong, L. Khoudour, C. Achard, C. Meurie, O. LezorayDocument13 pagesSignal Processing: D.-N. Truong Cong, L. Khoudour, C. Achard, C. Meurie, O. Lezoraydiavoletta89No ratings yet
- Smart Security Surveillance with Face Mask DetectionDocument6 pagesSmart Security Surveillance with Face Mask DetectionKhushi UdasiNo ratings yet
- Study On Self Organizing Approach For Moving Object Detection and Tracking For Visual SurveillanceDocument3 pagesStudy On Self Organizing Approach For Moving Object Detection and Tracking For Visual SurveillanceInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- CNN LSTMDocument5 pagesCNN LSTMEngr. Naveed MazharNo ratings yet
- Smart SurveillanceDocument9 pagesSmart SurveillanceIJRASETPublicationsNo ratings yet
- Computer Vision Based Surveillance SystemDocument7 pagesComputer Vision Based Surveillance SystemIJRASETPublicationsNo ratings yet
- Guest Editorial Introduction To The Special Issue On Large-Scale Video Analytics For Enhanced Security: Algorithms and SystemsDocument4 pagesGuest Editorial Introduction To The Special Issue On Large-Scale Video Analytics For Enhanced Security: Algorithms and SystemsJuan Carlos Jordan LopezNo ratings yet
- (IJIT-V6I4P11) :madhankumar YDocument6 pages(IJIT-V6I4P11) :madhankumar YIJITJournalsNo ratings yet
- Real Time Smart Object Detection Using Machine LearningDocument28 pagesReal Time Smart Object Detection Using Machine LearningIJRASETPublications100% (1)
- A Literature Review of Object Detection Using YOLOv4 DetectorDocument7 pagesA Literature Review of Object Detection Using YOLOv4 DetectorIJRASETPublicationsNo ratings yet
- 1207 6774 PDFDocument14 pages1207 6774 PDFLee DestructeurNo ratings yet
- Modinagar Institute of Technology, Modinagar: Unattended Object Detection in Surveillance VideoDocument21 pagesModinagar Institute of Technology, Modinagar: Unattended Object Detection in Surveillance Videolokesh_045No ratings yet
- IJRAR23B2468Document4 pagesIJRAR23B2468vishalfundevf1000No ratings yet
- A Literature Survey On Applications of Image Processing For Video SurveillanceDocument3 pagesA Literature Survey On Applications of Image Processing For Video SurveillanceInternational Journal of Innovative Science and Research Technology0% (1)
- Object Motion Detection in Video Frames Using Background Frame MatchingDocument4 pagesObject Motion Detection in Video Frames Using Background Frame MatchingseventhsensegroupNo ratings yet
- Social Distance Detection With The Help of Deep LearningDocument7 pagesSocial Distance Detection With The Help of Deep LearningIJRASETPublicationsNo ratings yet
- Human Activity Recognition Using Neural Networks and Spatio-Temporal Histogram of Structure Tensors (St-Host) DescriptorDocument14 pagesHuman Activity Recognition Using Neural Networks and Spatio-Temporal Histogram of Structure Tensors (St-Host) DescriptorSmartech InnovationNo ratings yet
- Walkthrough Guide to General GameplayDocument67 pagesWalkthrough Guide to General GameplayMost WantedNo ratings yet
- Iob Debit Card Payment at Irctc Website: Indian Overseas BankDocument3 pagesIob Debit Card Payment at Irctc Website: Indian Overseas BankMost WantedNo ratings yet
- BE CSE Lab Practical ScheduleDocument1 pageBE CSE Lab Practical ScheduleMost WantedNo ratings yet
- ContinueDocument4 pagesContinueMost WantedNo ratings yet
- BE CSE Lab Practical ScheduleDocument1 pageBE CSE Lab Practical ScheduleMost WantedNo ratings yet
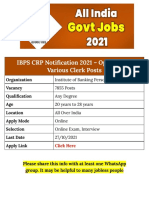
- All India Govt Jobs 2021Document26 pagesAll India Govt Jobs 2021Mohan guttalNo ratings yet
- Confidential Employment ApplicationDocument5 pagesConfidential Employment ApplicationMost WantedNo ratings yet
- Ge6075 Notes Rejinpaul I PDFDocument89 pagesGe6075 Notes Rejinpaul I PDFMalar AmuNo ratings yet
- BE CSE Lab Practical ScheduleDocument1 pageBE CSE Lab Practical ScheduleMost WantedNo ratings yet
- Security Record-PrintDocument35 pagesSecurity Record-PrintMost WantedNo ratings yet
- An Introduction to Information RetrievalDocument108 pagesAn Introduction to Information RetrievalMost WantedNo ratings yet
- Pratheep Kumar K: Education SkillsDocument1 pagePratheep Kumar K: Education SkillsMost WantedNo ratings yet
- 01.B.E. CSE Final PDFDocument125 pages01.B.E. CSE Final PDFANNo ratings yet
- eCAFDocument6 pageseCAFRavi KumaraNo ratings yet
- Tax Invoice/Bill of Supply/Cash Memo: (Original For Recipient)Document1 pageTax Invoice/Bill of Supply/Cash Memo: (Original For Recipient)Most WantedNo ratings yet
- Play With Us Episode 2 A Walkthrough: How To UseDocument11 pagesPlay With Us Episode 2 A Walkthrough: How To UseFernando Dias100% (1)
- eCAFDocument6 pageseCAFMost WantedNo ratings yet
- The Concept of Police New VisibilityDocument18 pagesThe Concept of Police New VisibilityJohn Michael T. BasibasNo ratings yet
- Hikvision DVR Won't Display Channels FixedDocument6 pagesHikvision DVR Won't Display Channels FixedSaso SaskoNo ratings yet
- Effectiveness of CCTV Cameras Instalation in CrimeDocument28 pagesEffectiveness of CCTV Cameras Instalation in CrimeMarc PardonzalanNo ratings yet
- Hidden Catalo and Audio CamDocument65 pagesHidden Catalo and Audio CamShahrin Akmar Mohamed ShaharuddinNo ratings yet
- Drawingsdocumentsrequiredforsolarprojects 131110061739 Phpapp01Document4 pagesDrawingsdocumentsrequiredforsolarprojects 131110061739 Phpapp01Battinapati Shiva100% (1)
- Information SecurityDocument39 pagesInformation SecurityRem RemNo ratings yet
- Dahua Ip Solar 4G Network Camera - Infiniteoptions Inc.Document2 pagesDahua Ip Solar 4G Network Camera - Infiniteoptions Inc.Maria TheresaNo ratings yet
- Technostream PDFDocument15 pagesTechnostream PDFraulkmainaNo ratings yet
- Oosto OnPatrol DatasheetDocument6 pagesOosto OnPatrol DatasheetAnna CreedNo ratings yet
- PIARC ITS Seminar Abstract Highlights Malaysia's SMART ProjectDocument15 pagesPIARC ITS Seminar Abstract Highlights Malaysia's SMART ProjectLuis Alex Meza OsorioNo ratings yet
- Implementation of Remotely Controlled Wireless CCTV System: Name Hammed Oluseyi Riliwan ND/180104Document14 pagesImplementation of Remotely Controlled Wireless CCTV System: Name Hammed Oluseyi Riliwan ND/180104emily ambrosinoNo ratings yet
- The Solution For Campus Security Brochure PDFDocument12 pagesThe Solution For Campus Security Brochure PDFHelmy HtssNo ratings yet
- Chapter 2Document32 pagesChapter 2shellaNo ratings yet
- Godson Development of A Suveillance SystemDocument70 pagesGodson Development of A Suveillance SystemEhrunmusele DanielNo ratings yet
- Analog Vs Digital CCTVDocument4 pagesAnalog Vs Digital CCTVJohn Jefferson LegaspiNo ratings yet
- A Real-Time Surveillance Mini-Rover Based On (Nazmul Hossain, 2015)Document6 pagesA Real-Time Surveillance Mini-Rover Based On (Nazmul Hossain, 2015)guianÜNo ratings yet
- Project Report On Private SecurityDocument97 pagesProject Report On Private SecuritySaurav Gautam33% (3)
- HSE Safety Alert - Preventing Unauthorised Access Onto Scaffolding and Other Work PlatformsDocument6 pagesHSE Safety Alert - Preventing Unauthorised Access Onto Scaffolding and Other Work PlatformsderdushaNo ratings yet
- Bilete Oral Si Test Bilingv 2010Document16 pagesBilete Oral Si Test Bilingv 2010ZzZx1100% (1)
- CCTV Surveillance ScopeDocument6 pagesCCTV Surveillance Scopeaglass13No ratings yet
- Restoring CCTV for School SafetyDocument3 pagesRestoring CCTV for School SafetyEdelmar BenosaNo ratings yet
- Case Study: Organizing System Within A Sikh Gurudwara Management CommitteeDocument8 pagesCase Study: Organizing System Within A Sikh Gurudwara Management CommitteeRishabh GuptaNo ratings yet
- End User-Technical Sheet: 7 Units of Air CurtainsDocument41 pagesEnd User-Technical Sheet: 7 Units of Air CurtainsAngelica Sta. MariaNo ratings yet
- BuCor-Management - Review-MeetingDocument36 pagesBuCor-Management - Review-Meetingelias mwiineNo ratings yet
- Company Profile E-XpertsDocument8 pagesCompany Profile E-XpertsexpertspkNo ratings yet
- Closed Circuit Television (CCTV) Camera - Site TestDocument6 pagesClosed Circuit Television (CCTV) Camera - Site TestMuhammad YusriNo ratings yet
- Viisights Smart Cities EbookDocument15 pagesViisights Smart Cities EbookMarius Cristian CostiucNo ratings yet
- CCTVDocument19 pagesCCTVFriends ParkNo ratings yet
- Industrial Security Management (Lea3)Document33 pagesIndustrial Security Management (Lea3)Sevilla Joenard93% (46)
- Chip War: The Quest to Dominate the World's Most Critical TechnologyFrom EverandChip War: The Quest to Dominate the World's Most Critical TechnologyRating: 4.5 out of 5 stars4.5/5 (227)
- CompTIA A+ Certification All-in-One Exam Guide, Eleventh Edition (Exams 220-1101 & 220-1102)From EverandCompTIA A+ Certification All-in-One Exam Guide, Eleventh Edition (Exams 220-1101 & 220-1102)Rating: 5 out of 5 stars5/5 (2)
- Chip War: The Fight for the World's Most Critical TechnologyFrom EverandChip War: The Fight for the World's Most Critical TechnologyRating: 4.5 out of 5 stars4.5/5 (82)
- CompTIA Security+ All-in-One Exam Guide, Sixth Edition (Exam SY0-601)From EverandCompTIA Security+ All-in-One Exam Guide, Sixth Edition (Exam SY0-601)Rating: 5 out of 5 stars5/5 (1)
- 8051 Microcontroller: An Applications Based IntroductionFrom Everand8051 Microcontroller: An Applications Based IntroductionRating: 5 out of 5 stars5/5 (6)
- Hacking With Linux 2020:A Complete Beginners Guide to the World of Hacking Using Linux - Explore the Methods and Tools of Ethical Hacking with LinuxFrom EverandHacking With Linux 2020:A Complete Beginners Guide to the World of Hacking Using Linux - Explore the Methods and Tools of Ethical Hacking with LinuxNo ratings yet
- Model-based System and Architecture Engineering with the Arcadia MethodFrom EverandModel-based System and Architecture Engineering with the Arcadia MethodNo ratings yet
- iPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XFrom EverandiPhone X Hacks, Tips and Tricks: Discover 101 Awesome Tips and Tricks for iPhone XS, XS Max and iPhone XRating: 3 out of 5 stars3/5 (2)
- CompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002From EverandCompTIA A+ Complete Review Guide: Exam Core 1 220-1001 and Exam Core 2 220-1002Rating: 5 out of 5 stars5/5 (1)
- CompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102From EverandCompTIA A+ Complete Review Guide: Core 1 Exam 220-1101 and Core 2 Exam 220-1102Rating: 5 out of 5 stars5/5 (2)
- Dancing with Qubits: How quantum computing works and how it can change the worldFrom EverandDancing with Qubits: How quantum computing works and how it can change the worldRating: 5 out of 5 stars5/5 (1)
- Amazon Web Services (AWS) Interview Questions and AnswersFrom EverandAmazon Web Services (AWS) Interview Questions and AnswersRating: 4.5 out of 5 stars4.5/5 (3)
- Computer Science: A Concise IntroductionFrom EverandComputer Science: A Concise IntroductionRating: 4.5 out of 5 stars4.5/5 (14)
- Cancer and EMF Radiation: How to Protect Yourself from the Silent Carcinogen of ElectropollutionFrom EverandCancer and EMF Radiation: How to Protect Yourself from the Silent Carcinogen of ElectropollutionRating: 5 out of 5 stars5/5 (2)
- From Cell Phones to VOIP: The Evolution of Communication Technology - Technology Books | Children's Reference & NonfictionFrom EverandFrom Cell Phones to VOIP: The Evolution of Communication Technology - Technology Books | Children's Reference & NonfictionNo ratings yet
- The No Bull$#!£ Guide to Building Your Own PC: No Bull GuidesFrom EverandThe No Bull$#!£ Guide to Building Your Own PC: No Bull GuidesNo ratings yet
- 2018 (40+) Best Free Apps for Kindle Fire Tablets: +Simple Step-by-Step Guide For New Kindle Fire UsersFrom Everand2018 (40+) Best Free Apps for Kindle Fire Tablets: +Simple Step-by-Step Guide For New Kindle Fire UsersNo ratings yet
- Kindle Fire Owner's Manual: The ultimate Kindle Fire guide to getting started, advanced user tips, and finding unlimited free books, videos and apps on Amazon and beyondFrom EverandKindle Fire Owner's Manual: The ultimate Kindle Fire guide to getting started, advanced user tips, and finding unlimited free books, videos and apps on Amazon and beyondRating: 4.5 out of 5 stars4.5/5 (4)