You might also like
- Machine Learning Approximation Algorithms For High-Dimensional Fully Nonlinear PDEs and Second-Order Backward SDEsDocument56 pagesMachine Learning Approximation Algorithms For High-Dimensional Fully Nonlinear PDEs and Second-Order Backward SDEsAli MohadesNo ratings yet
- SDE Learning 2018 ETHZ UniDocument56 pagesSDE Learning 2018 ETHZ UniAli MohadesNo ratings yet
- Numerical approximations of SDEs with non-globally Lipschitz coefficientsDocument102 pagesNumerical approximations of SDEs with non-globally Lipschitz coefficientsAli MohadesNo ratings yet
- ANN Approximations Overcome Curse of Dimensionality in Black-Scholes PDEsDocument124 pagesANN Approximations Overcome Curse of Dimensionality in Black-Scholes PDEsAli MohadesNo ratings yet
- DNN approximations overcome curse of dimensionality for Kolmogorov PDEsDocument48 pagesDNN approximations overcome curse of dimensionality for Kolmogorov PDEsAli MohadesNo ratings yet
- (Beck, Christian Et Al.), Deep Splitting Method For Parabolic PDEs, (2019)Document40 pages(Beck, Christian Et Al.), Deep Splitting Method For Parabolic PDEs, (2019)Aman JalanNo ratings yet
- IWCITDocument6 pagesIWCITAli MohadesNo ratings yet
- Real hw1Document7 pagesReal hw1Ali MohadesNo ratings yet
- Solving High-Dimensional Partial Differential Equations Using Deep LearningDocument14 pagesSolving High-Dimensional Partial Differential Equations Using Deep LearningJames MattosNo ratings yet
- High Dimensional Forecasting via Interpretable Vector AutoregressionDocument52 pagesHigh Dimensional Forecasting via Interpretable Vector AutoregressionAli MohadesNo ratings yet
- LTE CMDDocument1 pageLTE CMDAli MohadesNo ratings yet
- Empirical Risk Minimization in Numerical Approximation of Black-Scholes Partial Differential Equations Via Deep LearningDocument35 pagesEmpirical Risk Minimization in Numerical Approximation of Black-Scholes Partial Differential Equations Via Deep LearningAli MohadesNo ratings yet
- BroadradioDocument2 pagesBroadradioAli MohadesNo ratings yet
- Performance Analysis of Cognitive Two-Way AF Relaying Systems With Wireless Energy Harvesting Over Nakagami-Fading ChannelsDocument6 pagesPerformance Analysis of Cognitive Two-Way AF Relaying Systems With Wireless Energy Harvesting Over Nakagami-Fading ChannelsAli MohadesNo ratings yet
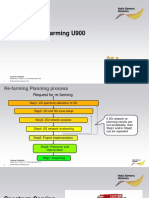
- Refarming Project 2013 - V1 - To ShareDocument54 pagesRefarming Project 2013 - V1 - To ShareDanee Boy Panjaitan100% (5)
- BroadradioDocument2 pagesBroadradioAli MohadesNo ratings yet
- Rxocf I2A 57 RX Path Imbalance: Moty Fault Class Fault Code DescriptionDocument42 pagesRxocf I2A 57 RX Path Imbalance: Moty Fault Class Fault Code DescriptionAli MohadesNo ratings yet
- LTE CMDDocument1 pageLTE CMDAli MohadesNo ratings yet
- RRU and baseband specifications for multi-mode radio networksDocument13 pagesRRU and baseband specifications for multi-mode radio networksAli Mohades100% (1)
- LTE CMDDocument1 pageLTE CMDAli MohadesNo ratings yet
- 11Document162 pages11Ali MohadesNo ratings yet
- RRU and baseband specifications for multi-mode radio networksDocument13 pagesRRU and baseband specifications for multi-mode radio networksAli Mohades100% (1)
- Inter Frequency Handover PDFDocument17 pagesInter Frequency Handover PDFESkuda100% (1)
- Rxocf I2A 57 RX Path Imbalance: Moty Fault Class Fault Code DescriptionDocument42 pagesRxocf I2A 57 RX Path Imbalance: Moty Fault Class Fault Code DescriptionAli MohadesNo ratings yet
- Rxocf I2A 57 RX Path Imbalance: Moty Fault Class Fault Code DescriptionDocument42 pagesRxocf I2A 57 RX Path Imbalance: Moty Fault Class Fault Code DescriptionAli MohadesNo ratings yet
- Refarming Project 2013 - V1 - To ShareDocument54 pagesRefarming Project 2013 - V1 - To ShareDanee Boy Panjaitan100% (5)
- PDFDocument13 pagesPDFdiego llanos luceroNo ratings yet
- Refarming Project 2013 - V1 - To ShareDocument54 pagesRefarming Project 2013 - V1 - To ShareDanee Boy Panjaitan100% (5)
- GSM Location Update Sequence Diagram PDFDocument5 pagesGSM Location Update Sequence Diagram PDFxaero_24No ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Mapeh-7pe Q2 Summative-TestDocument2 pagesMapeh-7pe Q2 Summative-TestVhannie AcquiatanNo ratings yet
- Rabbani Env 3Document298 pagesRabbani Env 3Arnob SarkerNo ratings yet
- Of Our TimesDocument84 pagesOf Our TimesThe Journal of Music100% (1)
- 1z0 447 DemoDocument5 pages1z0 447 Demojosegitijose24No ratings yet
- HZVDocument6 pagesHZVnurrozaqNo ratings yet
- Analyzing Historical DocumentDocument4 pagesAnalyzing Historical DocumentChristine Joy VillasisNo ratings yet
- Social Engineering For Pentester PenTest - 02 - 2013Document81 pagesSocial Engineering For Pentester PenTest - 02 - 2013Black RainNo ratings yet
- AST Study Centers 2021 Updated Till 25oct2021 GOVT DATADocument33 pagesAST Study Centers 2021 Updated Till 25oct2021 GOVT DATAprasadNo ratings yet
- Human Ear and Role of Hearing in HCIDocument4 pagesHuman Ear and Role of Hearing in HCIrafia0% (1)
- DDX3035 - Audio File - KenwoodDocument5 pagesDDX3035 - Audio File - KenwoodRistho LutherNo ratings yet
- Legal Documents Evidence in Safety Related Proceedings 1663086621Document9 pagesLegal Documents Evidence in Safety Related Proceedings 1663086621richardNo ratings yet
- Celebrity Parents Open Up About Raising Children With Special NeedsDocument4 pagesCelebrity Parents Open Up About Raising Children With Special NeedsBarathy ChandrasegranNo ratings yet
- GARAM ModelDocument40 pagesGARAM ModelprasunmathurNo ratings yet
- Inergen Order Data SheetDocument31 pagesInergen Order Data Sheetkarim3samirNo ratings yet
- Daniel J. Wood - Realm of The Vampire - History and The Undead-Galde Press (2013)Document156 pagesDaniel J. Wood - Realm of The Vampire - History and The Undead-Galde Press (2013)Jerry KanneNo ratings yet
- English Team Agenda 2023-2024Document4 pagesEnglish Team Agenda 2023-2024api-604869051No ratings yet
- Chapter 2 Study Questions Solution ManualDocument12 pagesChapter 2 Study Questions Solution ManualSebastiàn Valle100% (3)
- Case3: What's in A Car 1. What Kind of Research Study Should Shridhar Undertake? Define TheDocument2 pagesCase3: What's in A Car 1. What Kind of Research Study Should Shridhar Undertake? Define TheRoshan kumar Rauniyar0% (3)
- Balanced Scorecard ThesisDocument59 pagesBalanced Scorecard Thesisapi-3825626100% (5)
- Open University of Tanzania Term PaperDocument7 pagesOpen University of Tanzania Term Paperafmzfmeeavndqe100% (1)
- Form 4 Biology Chapter OverviewDocument21 pagesForm 4 Biology Chapter OverviewKar KuanNo ratings yet
- Set 177Document599 pagesSet 177adilfarooq25No ratings yet
- Pharmacist Licensing Requirements by StateDocument21 pagesPharmacist Licensing Requirements by StateBio DataNo ratings yet
- Service Training: Vorsprung Durch Technik WWW - Audi.deDocument15 pagesService Training: Vorsprung Durch Technik WWW - Audi.depuncimanNo ratings yet
- 1 SMDocument9 pages1 SMhasanuddinnst1No ratings yet
- Consumers Guide To The ExpertsDocument406 pagesConsumers Guide To The ExpertsHassan Younhous Traore KonéNo ratings yet
- 49 - Sembollerin El KitabDocument27 pages49 - Sembollerin El KitabCeren ToksözNo ratings yet
- A Review of Agricultural Drought Assessment With Remote Sensing Data: Methods, Issues, Challenges and OpportunitiesDocument14 pagesA Review of Agricultural Drought Assessment With Remote Sensing Data: Methods, Issues, Challenges and Opportunitiesاسامة نعمة جبارNo ratings yet
- Use of Passive VoiceDocument13 pagesUse of Passive VoiceLuciana DicieroNo ratings yet
- PDF DocumentDocument10 pagesPDF DocumentNIKHIL DASARINo ratings yet