You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- STA 2014 SaidDocument6 pagesSTA 2014 SaidHAFEDH ABIDNo ratings yet
- Sliding Mode and PI Controllers For Uncertain Flexible Joint ManipulatorDocument8 pagesSliding Mode and PI Controllers For Uncertain Flexible Joint ManipulatorHAFEDH ABIDNo ratings yet
- Atef Jemmali SSD20Document5 pagesAtef Jemmali SSD20HAFEDH ABIDNo ratings yet
- Es884engineered Science-2023Document16 pagesEs884engineered Science-2023HAFEDH ABIDNo ratings yet
- Remote Control of A Domestic Equipment From An Android Application Based On Raspberry Pi CardDocument6 pagesRemote Control of A Domestic Equipment From An Android Application Based On Raspberry Pi CardHAFEDH ABIDNo ratings yet
- STA 2013 LiliaDocument6 pagesSTA 2013 LiliaHAFEDH ABIDNo ratings yet
- Indirect Fuzzy Sliding Adaptive Control Law For Nonlinear SystemsDocument6 pagesIndirect Fuzzy Sliding Adaptive Control Law For Nonlinear SystemsHAFEDH ABIDNo ratings yet
- Sliding Mode and PI Controllers For Uncertain Flexible Joint ManipulatorDocument8 pagesSliding Mode and PI Controllers For Uncertain Flexible Joint ManipulatorHAFEDH ABIDNo ratings yet
- STA 2013 LiliaDocument6 pagesSTA 2013 LiliaHAFEDH ABIDNo ratings yet
- α-Stabilization of Uncertain Positive: Robust Takagi-Sugeno Systems with Time-Delay via Memory State-FeedbackDocument15 pagesα-Stabilization of Uncertain Positive: Robust Takagi-Sugeno Systems with Time-Delay via Memory State-FeedbackHAFEDH ABIDNo ratings yet
- MPPT of A Photovoltaic Panel Based On Takagi-Sugeno and Fractional AlgorithmsDocument9 pagesMPPT of A Photovoltaic Panel Based On Takagi-Sugeno and Fractional AlgorithmsHAFEDH ABIDNo ratings yet
- Adaptive Super-Twisting Sliding Mode Control For Wind Energy Conversion SystemDocument9 pagesAdaptive Super-Twisting Sliding Mode Control For Wind Energy Conversion SystemHAFEDH ABIDNo ratings yet
- MPPT of A Photovoltaic Panel Based On Takagi-Sugeno and Fractional AlgorithmsDocument9 pagesMPPT of A Photovoltaic Panel Based On Takagi-Sugeno and Fractional AlgorithmsHAFEDH ABIDNo ratings yet
- Adaptive Fuzzy Sliding Mode Controller For A Class of SISO Nonlinear Time-Delay SystemsDocument13 pagesAdaptive Fuzzy Sliding Mode Controller For A Class of SISO Nonlinear Time-Delay SystemsHAFEDH ABIDNo ratings yet
- Hafedh Abid : Direct Fuzzy Adaptive Control Based On Sliding Surface For A Class of SISO Non-Linear SystemsDocument9 pagesHafedh Abid : Direct Fuzzy Adaptive Control Based On Sliding Surface For A Class of SISO Non-Linear SystemsHAFEDH ABIDNo ratings yet
- Adaptive Fuzzy Sliding Mode Controller For A Class of SISO Nonlinear Time-Delay SystemsDocument13 pagesAdaptive Fuzzy Sliding Mode Controller For A Class of SISO Nonlinear Time-Delay SystemsHAFEDH ABIDNo ratings yet
- α-Stabilization of Uncertain Positive: Robust Takagi-Sugeno Systems with Time-Delay via Memory State-FeedbackDocument15 pagesα-Stabilization of Uncertain Positive: Robust Takagi-Sugeno Systems with Time-Delay via Memory State-FeedbackHAFEDH ABIDNo ratings yet
- Hafedh Abid : Direct Fuzzy Adaptive Control Based On Sliding Surface For A Class of SISO Non-Linear SystemsDocument9 pagesHafedh Abid : Direct Fuzzy Adaptive Control Based On Sliding Surface For A Class of SISO Non-Linear SystemsHAFEDH ABIDNo ratings yet
- Hindaoui 2014Document10 pagesHindaoui 2014HAFEDH ABIDNo ratings yet
- Abid HanenDocument10 pagesAbid HanenHAFEDH ABIDNo ratings yet
- Ain Shams Engineering Journal: K. Loukil, H. Abbes, H. Abid, M. Abid, A. ToumiDocument10 pagesAin Shams Engineering Journal: K. Loukil, H. Abbes, H. Abid, M. Abid, A. ToumiHAFEDH ABIDNo ratings yet
- Asma TounsiDocument13 pagesAsma TounsiHAFEDH ABIDNo ratings yet
- Ain Shams Engineering Journal: K. Loukil, H. Abbes, H. Abid, M. Abid, A. ToumiDocument10 pagesAin Shams Engineering Journal: K. Loukil, H. Abbes, H. Abid, M. Abid, A. ToumiHAFEDH ABIDNo ratings yet
- Abid RobotDocument10 pagesAbid RobotHAFEDH ABIDNo ratings yet
- Abid RobotDocument10 pagesAbid RobotHAFEDH ABIDNo ratings yet
- Abid HanenDocument10 pagesAbid HanenHAFEDH ABIDNo ratings yet
- Ain Shams Engineering Journal: K. Loukil, H. Abbes, H. Abid, M. Abid, A. ToumiDocument10 pagesAin Shams Engineering Journal: K. Loukil, H. Abbes, H. Abid, M. Abid, A. ToumiHAFEDH ABIDNo ratings yet
- Asma TounsiDocument13 pagesAsma TounsiHAFEDH ABIDNo ratings yet
- Adaptive Super-Twisting Sliding Mode Control For Wind Energy Conversion SystemDocument9 pagesAdaptive Super-Twisting Sliding Mode Control For Wind Energy Conversion SystemHAFEDH ABIDNo ratings yet
- Specification For Paging and Interconnection SystemDocument7 pagesSpecification For Paging and Interconnection SystemShibu ThomasNo ratings yet
- Schneider A9F 74206Document2 pagesSchneider A9F 74206Rasek ResolfNo ratings yet
- IEC 60092-306 Electrical Installations in ShipsDocument9 pagesIEC 60092-306 Electrical Installations in ShipsAfdhal KamarulzamanNo ratings yet
- Product Datasheet: Acti9 iID - RCCB - 4P - 40A - 30ma - Type ADocument2 pagesProduct Datasheet: Acti9 iID - RCCB - 4P - 40A - 30ma - Type AqsNo ratings yet
- R01 LabotekDocument6 pagesR01 LabotekMatias SoraireNo ratings yet
- EPX-series Manual Ver 0.9 PDFDocument136 pagesEPX-series Manual Ver 0.9 PDFNguyen TriNo ratings yet
- SL Generator Ultrasunete RincoDocument2 pagesSL Generator Ultrasunete RincoDariaNo ratings yet
- H-Bridge Motor Driver 1A - SN754410Document6 pagesH-Bridge Motor Driver 1A - SN754410Jesus G FANo ratings yet
- I-Gard Consultant Specification GuideDocument16 pagesI-Gard Consultant Specification GuideMrNo ratings yet
- EC Motors & Fan Applications: What Is An Ec Motor?Document5 pagesEC Motors & Fan Applications: What Is An Ec Motor?Arjun ReddyNo ratings yet
- Dta 100 CDocument92 pagesDta 100 CAndrew SetiawanNo ratings yet
- Mechanical 7 Segment Display PDFDocument8 pagesMechanical 7 Segment Display PDFSergio Velasquez BonillaNo ratings yet
- Dsine MCCB PDFDocument27 pagesDsine MCCB PDFAryyama JanaNo ratings yet
- HICO 72kV Gas Circuit Breaker CatalogDocument2 pagesHICO 72kV Gas Circuit Breaker Catalogsubidubi99No ratings yet
- MCSet 17.5 KV - MCSET - AD1 - CONTDocument2 pagesMCSet 17.5 KV - MCSET - AD1 - CONTSrihari Kumar andavilliNo ratings yet
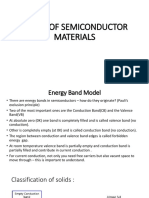
- Basics of Semiconductor Materials - With NotesDocument57 pagesBasics of Semiconductor Materials - With Notesgourishetty_raveesh100% (1)
- PsiiDocument8 pagesPsiiandhracollegesNo ratings yet
- Emergency Stop, Stop Category 1 (Option +Q964) For ACS880-07/07LC/17/17LC/37/37LC DrivesDocument36 pagesEmergency Stop, Stop Category 1 (Option +Q964) For ACS880-07/07LC/17/17LC/37/37LC Drivesbj156iNo ratings yet
- ElectrosurgeryDocument5 pagesElectrosurgeryMustafaNo ratings yet
- Physics Lab Experiment 1Document3 pagesPhysics Lab Experiment 1GeneNo ratings yet
- Manual Aire Acondicionado HaierDocument48 pagesManual Aire Acondicionado Haierjguerrero.067100% (3)
- Innovative Numerical Protection Relay Design On The Basis of Sampled Measured Values For Smart GridsDocument225 pagesInnovative Numerical Protection Relay Design On The Basis of Sampled Measured Values For Smart GridsNazi JoonNo ratings yet
- Basic Op-Amp CircuitsDocument58 pagesBasic Op-Amp CircuitsNuman khanNo ratings yet
- Measurement of Sheet Resistivities With The Four-Point Probe by F. M. SMITSDocument8 pagesMeasurement of Sheet Resistivities With The Four-Point Probe by F. M. SMITSQuadrant SalamNo ratings yet
- USI FullCatalog 2018Document96 pagesUSI FullCatalog 2018Nguyễn Thị HườngNo ratings yet
- 8BK88Document4 pages8BK88t_syamprasadNo ratings yet
- Basic Electrical EngineeringDocument11 pagesBasic Electrical EngineeringJeffrey MintahNo ratings yet
- 2806 01 PDFDocument33 pages2806 01 PDFAmitNo ratings yet
- MSC ThesisDocument62 pagesMSC ThesisNsikanIkpeNo ratings yet
- Electrical Experimenter - Nikola Tesla 1919 - 02Document84 pagesElectrical Experimenter - Nikola Tesla 1919 - 02Rafael Morris100% (1)