You might also like
- Transmissions: Direct Support and General SupportDocument52 pagesTransmissions: Direct Support and General Supportfkowalski1942No ratings yet
- Installation Instructions: Lexus LX470 Toyota Landcruiser 87409 75095 44546Document6 pagesInstallation Instructions: Lexus LX470 Toyota Landcruiser 87409 75095 44546Urip S. SetyadjiNo ratings yet
- Arcelormittal Pressure VesselDocument10 pagesArcelormittal Pressure VesselkokopirokoNo ratings yet
- Screenshot 2023-09-12 at 17.02.56Document150 pagesScreenshot 2023-09-12 at 17.02.56Hamid100% (1)
- Testing agricultural trailersDocument9 pagesTesting agricultural trailersEdsel Jay RaperNo ratings yet
- Ae Ae Ad Ac Ab Aa Z y X W V U T S R Q P o N M L K J I H G F e D C B ADocument1 pageAe Ae Ad Ac Ab Aa Z y X W V U T S R Q P o N M L K J I H G F e D C B ACRACNo ratings yet
- TM 5-3825-225-14P Distributor, Water, Semi-Trailer, Macleod MDL WD6S, NSN 3825-01-065-6211Document415 pagesTM 5-3825-225-14P Distributor, Water, Semi-Trailer, Macleod MDL WD6S, NSN 3825-01-065-6211AdvocateNo ratings yet
- Alform 700 MCDocument9 pagesAlform 700 MCCarlos Nombela PalaciosNo ratings yet
- Hagglund BV206D6 enDocument268 pagesHagglund BV206D6 enrodizianoNo ratings yet
- Military Vehicle Turrets, Gun Mounts, and AccessoriesDocument39 pagesMilitary Vehicle Turrets, Gun Mounts, and AccessoriesDima Shurov0% (1)
- Sist en 13104 2009 A2 2014Document12 pagesSist en 13104 2009 A2 2014Юрий КостенкоNo ratings yet
- Spitwater 10120Document11 pagesSpitwater 10120Brendon Stanley100% (1)
- Design Features: SL-KZ-004 Rev. ADocument2 pagesDesign Features: SL-KZ-004 Rev. AguzmanitaNo ratings yet
- Allison MD/B 300/B 400 Series On-Highway Transmissions Parts CatalogDocument13 pagesAllison MD/B 300/B 400 Series On-Highway Transmissions Parts CatalogZafiro Feliz GalanNo ratings yet
- DRS 160 wheel block component partsDocument16 pagesDRS 160 wheel block component partsAmazonas ManutençãoNo ratings yet
- TB 43-0242 Spot Painting 2007Document26 pagesTB 43-0242 Spot Painting 2007Enrico959No ratings yet
- 2013 Wright Specifications CatalogDocument189 pages2013 Wright Specifications CatalogcenicercNo ratings yet
- TM-9-2320-366-24P-2despiece M1038 PDFDocument962 pagesTM-9-2320-366-24P-2despiece M1038 PDFMarina Abigail CAMARGONo ratings yet
- C 10Document3 pagesC 10Michaelben MichaelbenNo ratings yet
- TRF DrawingsDocument4 pagesTRF DrawingssivaNo ratings yet
- Catalogo JUMBO InglesDocument8 pagesCatalogo JUMBO InglesDarko BogdanovicNo ratings yet
- Matunga Workshop Bogie Disassembly Line SpecsDocument24 pagesMatunga Workshop Bogie Disassembly Line SpecsJITENDRA SHRIVASTAVANo ratings yet
- Rail RoadDocument28 pagesRail RoadmalcotaNo ratings yet
- Trambeam CatalogDocument252 pagesTrambeam CatalogMuthu Barathi ParamasivamNo ratings yet
- Aras Innovator11 PLMEssentials StudentGuide April2018Document420 pagesAras Innovator11 PLMEssentials StudentGuide April2018yhm85100% (1)
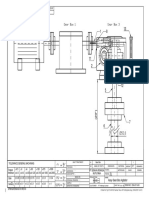
- Assy Gear Box AgitatorDocument1 pageAssy Gear Box Agitatorer_winwibowoNo ratings yet
- WEG Roller Table 50040456 Brochure EnglishDocument12 pagesWEG Roller Table 50040456 Brochure EnglishjmartinezmoNo ratings yet
- Grid-Lign Fl4011 1209 WebDocument2 pagesGrid-Lign Fl4011 1209 WebRenzo Jo LaurentNo ratings yet
- 1-Carter Interceptor GTR 250 Parts Manual MODEL - DifferentialDocument50 pages1-Carter Interceptor GTR 250 Parts Manual MODEL - DifferentialoakstrNo ratings yet
- GBS 1180 F12021 RevC Dimensión de Vagón de ChinalcoDocument1 pageGBS 1180 F12021 RevC Dimensión de Vagón de ChinalcoIsraelNo ratings yet
- ABB CatalogueDocument6 pagesABB CatalogueNavneet SinghNo ratings yet
- PS 783Document34 pagesPS 783Anselmo Alvarez GonzalezNo ratings yet
- OneSteel Steel Pipe Final LoResDocument24 pagesOneSteel Steel Pipe Final LoResPhilip TeakleNo ratings yet
- Varieties of The Planetery Gearing TypesDocument14 pagesVarieties of The Planetery Gearing Typeskwayneolson6081No ratings yet
- TM 9 2320 366 10 HRDocument37 pagesTM 9 2320 366 10 HRfuckuintheassscribdNo ratings yet
- Carbon Steel Tee Rails: Standard Specification ForDocument7 pagesCarbon Steel Tee Rails: Standard Specification ForAAYNo ratings yet
- Slotted Pins ISO 8752-St: Standard Delivery ProgramDocument1 pageSlotted Pins ISO 8752-St: Standard Delivery ProgramDave DthrNo ratings yet
- As 2842-1986 Fluid Power - O-Rings and Housings - Inch Series Metric ConversionDocument6 pagesAs 2842-1986 Fluid Power - O-Rings and Housings - Inch Series Metric ConversionSAI Global - APACNo ratings yet
- Industrial Gas Generator Illustrated Parts CatalogueDocument17 pagesIndustrial Gas Generator Illustrated Parts CataloguejuanaNo ratings yet
- AMO AR40 Spec SheetDocument2 pagesAMO AR40 Spec Sheetmaricelazayda100% (1)
- High Quality Rod Ends and Spherical Bearings ManufacturerDocument84 pagesHigh Quality Rod Ends and Spherical Bearings ManufacturerYatin AroraNo ratings yet
- Alignment of CouplingDocument24 pagesAlignment of Couplinger_sanjaypatelNo ratings yet
- Aquila AN-PVS-12Document2 pagesAquila AN-PVS-12NORDBNo ratings yet
- Coel Catalogue 2006 1Document58 pagesCoel Catalogue 2006 1Danilo MontesanoNo ratings yet
- Esab Tech Tips: Quick Guide Aristo U8 Control PanelDocument16 pagesEsab Tech Tips: Quick Guide Aristo U8 Control Panelthom0% (1)
- 2013-m100k Int'l SparesDocument3 pages2013-m100k Int'l SparesabdulNo ratings yet
- Development of Russian Rocket Engine TechnologyDocument208 pagesDevelopment of Russian Rocket Engine Technologywe4hoosNo ratings yet
- Acople Nara CatalogDocument48 pagesAcople Nara Catalogmarcelo castillo100% (1)
- 1997 US Army Vehicle Unit Maintenance 2 894pDocument894 pages1997 US Army Vehicle Unit Maintenance 2 894pthomasNo ratings yet
- Catálogo RULMECADocument308 pagesCatálogo RULMECArdgmaxiNo ratings yet
- GS52Document3 pagesGS52S.Hasan MirasadiNo ratings yet
- 152 - HARDOX - 500 - UK - Data Sheet PDFDocument2 pages152 - HARDOX - 500 - UK - Data Sheet PDFneto-portoNo ratings yet
- Design Project TwoDocument10 pagesDesign Project Twogeletayaadii100% (1)
- DSD Ultra Lightweight Design of A Single Speed Transmission CTI Berlin Dec 2017Document14 pagesDSD Ultra Lightweight Design of A Single Speed Transmission CTI Berlin Dec 2017ShivNo ratings yet
- Two Seated Buggy Chasis DesignDocument29 pagesTwo Seated Buggy Chasis Designex4182No ratings yet
- BAJA Design ReportDocument55 pagesBAJA Design ReportGauravNo ratings yet
- Vehicle Powertrain & DynamicsDocument18 pagesVehicle Powertrain & DynamicsSaad mubeenNo ratings yet
- 272 Concept Class Mansoura University DR Rev 2Document8 pages272 Concept Class Mansoura University DR Rev 2Gazzara WorldNo ratings yet
- DesignofSteeringSystem Draft PDFDocument11 pagesDesignofSteeringSystem Draft PDFAshish IngaleNo ratings yet
- Project Report On ATV Prototype BAJA SAE INDIADocument60 pagesProject Report On ATV Prototype BAJA SAE INDIAsanket50% (6)
- Dynamic Analysis and Design of Tracked Vehicles: Case Study IIDocument47 pagesDynamic Analysis and Design of Tracked Vehicles: Case Study IIIroshana Thushara KiriwattuduwaNo ratings yet
- Simulating track contact in vehiclesDocument30 pagesSimulating track contact in vehiclesIroshana Thushara KiriwattuduwaNo ratings yet
- Adams Tracked Vehicle (ATV) SolutionDocument8 pagesAdams Tracked Vehicle (ATV) SolutionIroshana Thushara KiriwattuduwaNo ratings yet
- Simulating contact in tracked vehiclesDocument30 pagesSimulating contact in tracked vehiclesIroshana Thushara KiriwattuduwaNo ratings yet
- Apxvll13 CDocument2 pagesApxvll13 C1No ratings yet
- Is.1795.1982 Pillar TapDocument20 pagesIs.1795.1982 Pillar Tapkishor150688No ratings yet
- Production Report November 2021Document9 pagesProduction Report November 2021nasir ahmedNo ratings yet
- Structural Investigation of the Centre Pompidou-Metz Roof LatticeDocument19 pagesStructural Investigation of the Centre Pompidou-Metz Roof Latticeyarikh870% (1)
- IEEE STD'sDocument7 pagesIEEE STD'sRajmohanNo ratings yet
- Government of Chhattisgarh: Ublic Orks EpartmentDocument19 pagesGovernment of Chhattisgarh: Ublic Orks EpartmentLucky ChopraNo ratings yet
- Re 29929Document4 pagesRe 29929Ahmed Abd ElhakeemNo ratings yet
- MEPLDocument35 pagesMEPLMegamet Engineers Pvt. Ltd.No ratings yet
- 1999 Ford Ranger Owner's ManualDocument216 pages1999 Ford Ranger Owner's Manualtacosoft100% (6)
- ID Credential CenterDocument696 pagesID Credential CenterAnonymous R0SnVvsGv0% (1)
- Asr 920Document100 pagesAsr 920Crimaros MartinezNo ratings yet
- V-30i H.D.H Machine Instruction ManualDocument54 pagesV-30i H.D.H Machine Instruction ManualsunhuynhNo ratings yet
- Building RepairsDocument8 pagesBuilding RepairsRenuka ChalikwarNo ratings yet
- Shotgun Outer: Tesla Body Repair Manual For Feedback On The Accuracy of This Document, Email - Updated: 27JUL17Document26 pagesShotgun Outer: Tesla Body Repair Manual For Feedback On The Accuracy of This Document, Email - Updated: 27JUL17Đông Nguyễn100% (1)
- Literature Review Concrete BlockDocument8 pagesLiterature Review Concrete Blockc5r0xg9z100% (1)
- RMP ProfileDocument14 pagesRMP ProfileChellaPandian100% (1)
- BOP Closing Unit SpecificationDocument8 pagesBOP Closing Unit SpecificationAlecs NedeaNo ratings yet
- 431CSL6206T60Document2 pages431CSL6206T60Igor CanabarroNo ratings yet
- Catalogos de Distribuidores Aquatrol PDFDocument24 pagesCatalogos de Distribuidores Aquatrol PDFcanizales70No ratings yet
- C ProgrammingDocument60 pagesC ProgrammingKool RakeshNo ratings yet
- Paint Brushes RollersDocument9 pagesPaint Brushes RollersDevender SharmaNo ratings yet
- Reb500 Test ProceduresDocument54 pagesReb500 Test ProceduresaladiperumalNo ratings yet
- Trade Secret Complaint Against GoogleDocument24 pagesTrade Secret Complaint Against GoogleNitasha TikuNo ratings yet
- ADDIE Model: Analysis PhaseDocument2 pagesADDIE Model: Analysis PhaseNimSha NimzzNo ratings yet
- Soln p3 21Document5 pagesSoln p3 21Vinicius RamosNo ratings yet
- Regulator Capacitor Manual PDFDocument8 pagesRegulator Capacitor Manual PDFKyle StairNo ratings yet
- Ground effects on pressure fluctuations in atmospheric boundary layersDocument21 pagesGround effects on pressure fluctuations in atmospheric boundary layersArchie PapNo ratings yet
- Datasheet Clearguard ACM 200 Axle Counting System AUDocument2 pagesDatasheet Clearguard ACM 200 Axle Counting System AUtrojan89No ratings yet
- Curriculum Vitae - Gowtham - 1802Document2 pagesCurriculum Vitae - Gowtham - 1802Anonymous b1TFqirANo ratings yet
- Eds 07 3102 Secondary Substation Civil DesignDocument26 pagesEds 07 3102 Secondary Substation Civil DesignUmerfarooq TawriNo ratings yet