You might also like
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- A380 General Familiarization CourseDocument908 pagesA380 General Familiarization CourseDiego Ruddy Arcaine Zegarrundo100% (5)
- Sic Based Solid State Power ControllerDocument113 pagesSic Based Solid State Power ControllerWilliam Jaldin CorralesNo ratings yet
- Modeling and Simulation of SSPC using Dymola SoftwareDocument5 pagesModeling and Simulation of SSPC using Dymola SoftwareWilliam Jaldin CorralesNo ratings yet
- Development of High-Current Solid-State Power Controllers For Aircraft High-Voltage DC Network ApplicationsDocument12 pagesDevelopment of High-Current Solid-State Power Controllers For Aircraft High-Voltage DC Network ApplicationsWilliam Jaldin CorralesNo ratings yet
- DC-DC Converter SSPC DesignDocument7 pagesDC-DC Converter SSPC DesignWilliam Jaldin CorralesNo ratings yet
- Para Las Fases de Ascenso y Descenso Se Insertará en El FMC La Velocidad 310/.84Document1 pagePara Las Fases de Ascenso y Descenso Se Insertará en El FMC La Velocidad 310/.84William Jaldin CorralesNo ratings yet
- The Ground Power Unit To Supply AircraftsDocument64 pagesThe Ground Power Unit To Supply AircraftsWilliam Jaldin CorralesNo ratings yet
- United States Patent (10) Patent No.: US 6,664,656 B2: Bernier (45) Date of Patent: Dec. 16, 2003Document10 pagesUnited States Patent (10) Patent No.: US 6,664,656 B2: Bernier (45) Date of Patent: Dec. 16, 2003William Jaldin CorralesNo ratings yet
- Implementation of A Solid-State Power Controller FDocument6 pagesImplementation of A Solid-State Power Controller FWilliam Jaldin CorralesNo ratings yet
- 90KVA GPUDocument2 pages90KVA GPUWilliam Jaldin CorralesNo ratings yet
- A380 Ata-31Document20 pagesA380 Ata-31William Jaldin CorralesNo ratings yet
- General Information and Operating Instructions: GPU - 406 GPU - 409Document42 pagesGeneral Information and Operating Instructions: GPU - 406 GPU - 409William Jaldin CorralesNo ratings yet
- 31 E EFIS - ECAM and INSTRUMENTSDocument92 pages31 E EFIS - ECAM and INSTRUMENTSWilliam Jaldin Corrales100% (1)
- Hydraulic Power Supply System MNT Manual (Curso)Document28 pagesHydraulic Power Supply System MNT Manual (Curso)William Jaldin CorralesNo ratings yet
- A330-200/300 Technical Training Manual Ramp & Servicing Course - M02 (Ge Cf6) Flight ControlsDocument78 pagesA330-200/300 Technical Training Manual Ramp & Servicing Course - M02 (Ge Cf6) Flight ControlsWilliam Jaldin CorralesNo ratings yet
- Microsoft Word - SRFQ 000-396-SUPPLYDocument7 pagesMicrosoft Word - SRFQ 000-396-SUPPLYWilliam Jaldin CorralesNo ratings yet
- Final Thesis Paper Merlijn Groot 12jun2020Document17 pagesFinal Thesis Paper Merlijn Groot 12jun2020William Jaldin CorralesNo ratings yet
- A330-200/300 Technical Training Manual Ramp & Servicing Course - M02 (Ge Cf6) Aircraft General PracticesDocument16 pagesA330-200/300 Technical Training Manual Ramp & Servicing Course - M02 (Ge Cf6) Aircraft General PracticesWilliam Jaldin CorralesNo ratings yet
- Svragulja Dino FPZ 2015 Diplo SveucDocument102 pagesSvragulja Dino FPZ 2015 Diplo SveucWilliam Jaldin CorralesNo ratings yet
- Review Challenges and Future Developments of Electric Taxiing SystemsDocument17 pagesReview Challenges and Future Developments of Electric Taxiing SystemsWilliam Jaldin CorralesNo ratings yet
- 45 Onboard Maintenance SystemsDocument56 pages45 Onboard Maintenance SystemsWilliam Jaldin CorralesNo ratings yet
- Dissertation - Fabrizio Re - FinalDocument189 pagesDissertation - Fabrizio Re - FinalWilliam Jaldin CorralesNo ratings yet
- Modeling and Simulation of Permanent Magnet Synchronous Motor Using MATLABDocument12 pagesModeling and Simulation of Permanent Magnet Synchronous Motor Using MATLABWilliam Jaldin CorralesNo ratings yet
- Heinrich Maximilian TE Finalsubmission2015august MAScDocument213 pagesHeinrich Maximilian TE Finalsubmission2015august MAScWilliam Jaldin CorralesNo ratings yet
- Final Thesis Paper Merlijn Groot 12jun2020Document17 pagesFinal Thesis Paper Merlijn Groot 12jun2020William Jaldin CorralesNo ratings yet
- Benefit and Performance Impact Analysis of Using Hydrogen Fuel Cell Powered E-Taxi System On A320 Class AirlinerDocument22 pagesBenefit and Performance Impact Analysis of Using Hydrogen Fuel Cell Powered E-Taxi System On A320 Class AirlinerWilliam Jaldin CorralesNo ratings yet
- Pre-Print State of The Art of Electric Taxiing SysDocument7 pagesPre-Print State of The Art of Electric Taxiing SysWilliam Jaldin CorralesNo ratings yet
- Final Thesis Paper Merlijn Groot 12jun2020Document17 pagesFinal Thesis Paper Merlijn Groot 12jun2020William Jaldin CorralesNo ratings yet
- Pre-Print State of The Art of Electric Taxiing SysDocument7 pagesPre-Print State of The Art of Electric Taxiing SysWilliam Jaldin CorralesNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Ground FaultDocument54 pagesGround FaultSonal Power UnlimitdNo ratings yet
- Aspect-96-155 Lateral Buckling PalmerDocument20 pagesAspect-96-155 Lateral Buckling PalmerJuan Roberto López Betanzos100% (2)
- Hydraulic JumpDocument19 pagesHydraulic JumpSusi SusilowatiNo ratings yet
- Design and Analysis of High-Gain MV DC-DC Converters for PV IntegrationDocument5 pagesDesign and Analysis of High-Gain MV DC-DC Converters for PV IntegrationHussain K. SayedNo ratings yet
- Switching Losses PDFDocument4 pagesSwitching Losses PDFleonardo_arévalo_28No ratings yet
- 7PG17 Technical ManualDocument7 pages7PG17 Technical Manualprabhakaran_hdecNo ratings yet
- ANSI C37.17-1997 Standard for Trip DevicesDocument13 pagesANSI C37.17-1997 Standard for Trip DevicesEddie Marin100% (1)
- Types of Orbits and Characteristics: Kepler's Law 2 en CC By-Sa 2.0 at ToliferoDocument3 pagesTypes of Orbits and Characteristics: Kepler's Law 2 en CC By-Sa 2.0 at ToliferoLeslie HicksNo ratings yet
- MATLAB Solution To Microwave Engineering Pozar 4th Ed. Example 1.5Document5 pagesMATLAB Solution To Microwave Engineering Pozar 4th Ed. Example 1.5John Bofarull GuixNo ratings yet
- Transmission LinesDocument40 pagesTransmission LinesKuronix ArcayaNo ratings yet
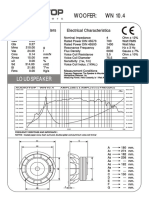
- Audiotop WN10Document1 pageAudiotop WN10Salvador González SánchezNo ratings yet
- José Goldemberg - Energy - What Everyone Needs To Know-Oxford University Press (2012)Document172 pagesJosé Goldemberg - Energy - What Everyone Needs To Know-Oxford University Press (2012)Good Boy ᴗ̈No ratings yet
- T D Stiff ModelDocument32 pagesT D Stiff ModelqbangkaNo ratings yet
- 3c Cu Xlpe PVC 12.7 (22) KV Heavy Duty Cws ArmouredDocument2 pages3c Cu Xlpe PVC 12.7 (22) KV Heavy Duty Cws Armouredgari_monsantoNo ratings yet
- JVC Av-2115ee Chassis CGDocument150 pagesJVC Av-2115ee Chassis CGarsyad1973No ratings yet
- The Magnetic Force Between Two Parallel ConductorsDocument10 pagesThe Magnetic Force Between Two Parallel ConductorsMelissa GabayNo ratings yet
- The World of Electrical Safety: Groupe SICAMEDocument43 pagesThe World of Electrical Safety: Groupe SICAMEhamidin_syarifNo ratings yet
- WB Harmonic Shaker TableDocument10 pagesWB Harmonic Shaker TablenetkasiaNo ratings yet
- Chapter 5 - Equilibrium of Rigid Bodies: ObjectivesDocument9 pagesChapter 5 - Equilibrium of Rigid Bodies: ObjectivesRhey LuceroNo ratings yet
- Electrostatic 15: Part No. Topic & Lecture Name DurationsDocument2 pagesElectrostatic 15: Part No. Topic & Lecture Name DurationsGourab RoyNo ratings yet
- Feynman Lectures On Physics Complete Volumes 1 2 3 PDFDocument2 pagesFeynman Lectures On Physics Complete Volumes 1 2 3 PDFBrandon11% (27)
- Echalk WordDocument3 pagesEchalk WordAngelica Calamba CalicaNo ratings yet
- Applicable Electrical StandardsDocument4 pagesApplicable Electrical Standardsamirtha_s2238No ratings yet
- Series and Parallel Resistors Virtual Experiment-Spring 2020-Virtual-StudentDocument8 pagesSeries and Parallel Resistors Virtual Experiment-Spring 2020-Virtual-Studentfaisal alkamali100% (1)
- Rigid Bodies Homework: Moments of InertiaDocument1 pageRigid Bodies Homework: Moments of InertiaShweta SridharNo ratings yet
- STD 11 Consolidated Test 1 Units & Errors, Straight Line Motion 1 and 2, NLM1 and VectorsDocument31 pagesSTD 11 Consolidated Test 1 Units & Errors, Straight Line Motion 1 and 2, NLM1 and VectorsRAVI ANANTHAKRISHNANNo ratings yet
- LT-22-ALL RES JEE Main Electromagnetic Waves 06-09-21-PSJDocument5 pagesLT-22-ALL RES JEE Main Electromagnetic Waves 06-09-21-PSJaryan ajeshNo ratings yet