You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Chapter 1Document15 pagesChapter 1MariaNo ratings yet
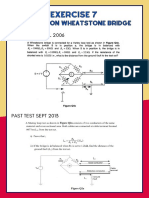
- EXERCISE 7-Fault CableDocument1 pageEXERCISE 7-Fault CableMariaNo ratings yet
- English Language UPSR 2020: Name ClassDocument20 pagesEnglish Language UPSR 2020: Name ClassNash ShaliNo ratings yet
- Chapter 3 Oscilloscope ApplicationDocument21 pagesChapter 3 Oscilloscope ApplicationMariaNo ratings yet
- Soalan Assingment TFS-symmetryDocument2 pagesSoalan Assingment TFS-symmetryMariaNo ratings yet
- TFS Vs EFSDocument2 pagesTFS Vs EFSMariaNo ratings yet
- Test Yourself: Do Your Best!Document2 pagesTest Yourself: Do Your Best!MariaNo ratings yet
- Quiz - C ProgrammingDocument3 pagesQuiz - C ProgrammingMariaNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- FMSVMSFernst DLT1040 05 Ae 0004Document58 pagesFMSVMSFernst DLT1040 05 Ae 0004btibi67No ratings yet
- Areas of Specialisation in GENCO and DISCO - PPDocument33 pagesAreas of Specialisation in GENCO and DISCO - PPchdiNo ratings yet
- Stock Statement AUG-18.Document38 pagesStock Statement AUG-18.Atul TiwariNo ratings yet
- Spec Sheet - 3306 250 KVA PrimeDocument4 pagesSpec Sheet - 3306 250 KVA PrimeAsantony Raj100% (1)
- SRN/ SEN15/ SEN25: General Electric HornsDocument2 pagesSRN/ SEN15/ SEN25: General Electric HornsRigoberto GomezNo ratings yet
- ACS 1000 Faults Alarms Classic0.1Document189 pagesACS 1000 Faults Alarms Classic0.1AbhishekDutta94% (16)
- Laboratory Evaluation of Magnesium Sacrificial Anode Test Specimens For Underground ApplicationsDocument4 pagesLaboratory Evaluation of Magnesium Sacrificial Anode Test Specimens For Underground ApplicationsPippo100% (1)
- Business PlanDocument25 pagesBusiness PlanMahesan SinthujanNo ratings yet
- ProMax 3D 3Ds 3DUserManualDocument94 pagesProMax 3D 3Ds 3DUserManualNoctua IngenieriaNo ratings yet
- Compal LA 6741PDocument36 pagesCompal LA 6741PGirleisson AraujoNo ratings yet
- Delay Using 8051 TimerDocument6 pagesDelay Using 8051 TimerVinothkumar UrumanNo ratings yet
- Presentasi MultimeterDocument41 pagesPresentasi MultimetermdNo ratings yet
- Liebert GXT MT+ CX 1/2/3 kVA Technical Specifications: Model GXT MT+ CX I GXT MT+ CX I GXT MT+ CX Phase Capacity InputDocument1 pageLiebert GXT MT+ CX 1/2/3 kVA Technical Specifications: Model GXT MT+ CX I GXT MT+ CX I GXT MT+ CX Phase Capacity Inputsasa hhNo ratings yet
- ST Ep DR 86a 1Document2 pagesST Ep DR 86a 1Sergio Trujillo CerroNo ratings yet
- Saso Certification: LEDVANCE, Parkring 29 - 33, 85748 Garching SASO Registration / 23rd of October 2017 1Document42 pagesSaso Certification: LEDVANCE, Parkring 29 - 33, 85748 Garching SASO Registration / 23rd of October 2017 1Abdelrahman HassanNo ratings yet
- Alaska PDFDocument54 pagesAlaska PDFPraphulla RaoNo ratings yet
- Bluetooth RC Drift CarDocument7 pagesBluetooth RC Drift CarAbanob HanyNo ratings yet
- Edition 7 Arcing Faults in Medium and Low Voltage Switchgear PDFDocument12 pagesEdition 7 Arcing Faults in Medium and Low Voltage Switchgear PDFE.ANANDANNo ratings yet
- NGR - Ninh Hoa - R#0Document18 pagesNGR - Ninh Hoa - R#0trungtruc nguyenNo ratings yet
- 5054 s13 Ms 22Document7 pages5054 s13 Ms 22Saaif ZareerNo ratings yet
- Transformer:-: Equipment Used To Raise or Lower The Potential Difference of An Alternating Current SupplyDocument20 pagesTransformer:-: Equipment Used To Raise or Lower The Potential Difference of An Alternating Current SupplynazurahNo ratings yet
- USB Pinout and WiringDocument4 pagesUSB Pinout and WiringnelsonhooverNo ratings yet
- Timing Consideration On A Safety PLCDocument11 pagesTiming Consideration On A Safety PLCerstendrainNo ratings yet
- Pelco Dome CCTV Camera ics090-CA8Document6 pagesPelco Dome CCTV Camera ics090-CA8Jamie DeltonNo ratings yet
- GOOLOO GE1200 - User ManualDocument1 pageGOOLOO GE1200 - User ManualzoltanpolyakNo ratings yet
- q7 Module RearDocument34 pagesq7 Module RearDardan HusiNo ratings yet
- Résumé DSEDocument4 pagesRésumé DSEসাগর আলীNo ratings yet
- eDocument3 pageseNicanor AliagaNo ratings yet
- Application Guidelines MEEPEDocument2 pagesApplication Guidelines MEEPEavionicsnabinNo ratings yet
- Abb Pricelist 2016 16.03.2016 PDFDocument216 pagesAbb Pricelist 2016 16.03.2016 PDFhiralalnhpcNo ratings yet