You might also like
- Model Driven Development for Embedded Software: Application to Communications for Drone SwarmFrom EverandModel Driven Development for Embedded Software: Application to Communications for Drone SwarmNo ratings yet
- Article: FlowMonitor - A Network Monitoring Framework For The Network Simulator 3 (NS-3)Document10 pagesArticle: FlowMonitor - A Network Monitoring Framework For The Network Simulator 3 (NS-3)ba7rbrdNo ratings yet
- Supporting The Memory System Evaluation With A Monitor SimulatorDocument8 pagesSupporting The Memory System Evaluation With A Monitor SimulatorDr. D. Chandrasekhar RaoNo ratings yet
- Computer Networks 1-5 ExperimentDocument14 pagesComputer Networks 1-5 ExperimentAyush PrakashNo ratings yet
- Simso: A Simulation Tool To Evaluate Real-Time Multiprocessor Scheduling AlgorithmsDocument7 pagesSimso: A Simulation Tool To Evaluate Real-Time Multiprocessor Scheduling AlgorithmssliNo ratings yet
- Optimal computing performance with symmetric multiprocessorsDocument8 pagesOptimal computing performance with symmetric multiprocessorsDeath AngelNo ratings yet
- Faculty Research StatementDocument3 pagesFaculty Research StatementMing JiangNo ratings yet
- Host-Compiled Multicore RTOS Simulator For Embedded Real-Time Software DevelopmentDocument6 pagesHost-Compiled Multicore RTOS Simulator For Embedded Real-Time Software DevelopmentRey JohnNo ratings yet
- Fggy KKL SkyDocument14 pagesFggy KKL SkyFahd SaifNo ratings yet
- 10.3922 Devendra - CompressedDocument6 pages10.3922 Devendra - CompressedDr-Pawan Singh KoriNo ratings yet
- Deconstructing The Memory Bus With SheenOccamyDocument4 pagesDeconstructing The Memory Bus With SheenOccamyJ Christian OdehnalNo ratings yet
- Article 1 R-E-W HeuristicDocument11 pagesArticle 1 R-E-W HeuristichelinNo ratings yet
- Machine Learning-Based Automatic Adaptation of SOA SystemsDocument9 pagesMachine Learning-Based Automatic Adaptation of SOA SystemsCarlosNo ratings yet
- The Hitchhiker's Guide To Operating SystemsDocument16 pagesThe Hitchhiker's Guide To Operating SystemsBùi Thị Như QuỳnhNo ratings yet
- Optorsim: A Simulation Tool For Scheduling and Replica Optimisation in Data GridsDocument4 pagesOptorsim: A Simulation Tool For Scheduling and Replica Optimisation in Data GridsosbihatNo ratings yet
- Yu Et Al. - OrCA a Distributed Serving System for TransformerDocument19 pagesYu Et Al. - OrCA a Distributed Serving System for TransformerpyryezorNo ratings yet
- Clustering Clickstream Data with a Three-Phase FrameworkDocument11 pagesClustering Clickstream Data with a Three-Phase FrameworkPPMPhilNo ratings yet
- Yasaweerasinghelage 2017Document4 pagesYasaweerasinghelage 2017Vaishnav KumbharNo ratings yet
- Article88 Analysis Limited Migrative ModelDocument12 pagesArticle88 Analysis Limited Migrative ModelhelinNo ratings yet
- Software Timing Analysis Using HWSW Cosimulation and Instruction Set SimulatorDocument5 pagesSoftware Timing Analysis Using HWSW Cosimulation and Instruction Set Simulatorkmjung1No ratings yet
- A Case For 16 Bit ArchitecturesDocument7 pagesA Case For 16 Bit Architecturesalvarito2009No ratings yet
- OS Modules SummaryDocument6 pagesOS Modules SummaryshilpasgNo ratings yet
- QoS-enabled ANFIS Dead Reckoning AlgorithmDocument11 pagesQoS-enabled ANFIS Dead Reckoning AlgorithmacevalloNo ratings yet
- The m5 Simulator ModelingDocument9 pagesThe m5 Simulator ModelingZulfadly UrufiNo ratings yet
- Power and Performance Aware Electronic System Level DesignDocument4 pagesPower and Performance Aware Electronic System Level DesignMOHAMMAD AWAISNo ratings yet
- Synthetic Trace Driven SimulationDocument8 pagesSynthetic Trace Driven Simulationreg2regNo ratings yet
- Hardware-Based Job Queue Management For Manycore Architectures and Openmp EnvironmentsDocument12 pagesHardware-Based Job Queue Management For Manycore Architectures and Openmp EnvironmentsManali BhutiyaniNo ratings yet
- Understanding Symmetric Encryption with FunicMulierDocument7 pagesUnderstanding Symmetric Encryption with FunicMulierOne TWoNo ratings yet
- Scimakelatex 23918 NoneDocument6 pagesScimakelatex 23918 None51pNo ratings yet
- Scimakelatex 6883 The A WhatDocument7 pagesScimakelatex 6883 The A WhatOne TWoNo ratings yet
- Design and Implementation of A Cache Hierarchy-Aware Task Scheduling For Parallel Loops On Multicore ArchitecturesDocument13 pagesDesign and Implementation of A Cache Hierarchy-Aware Task Scheduling For Parallel Loops On Multicore ArchitecturesCS & ITNo ratings yet
- Something About An NSA StudyDocument6 pagesSomething About An NSA StudycrestindNo ratings yet
- The Relationship Between I/O Automata and Superblocks: Augustus Justus and Willhelm LakeDocument6 pagesThe Relationship Between I/O Automata and Superblocks: Augustus Justus and Willhelm LakePolipio SaturnioNo ratings yet
- Simulation of Dynamic Grid Replication Strategies in OptorsimDocument15 pagesSimulation of Dynamic Grid Replication Strategies in OptorsimmcemceNo ratings yet
- Applied System SimulationDocument20 pagesApplied System SimulationLa Coqueteria SantaRosaNo ratings yet
- SimuLTE Springer OpenAccessVersionDocument18 pagesSimuLTE Springer OpenAccessVersionhancu georgeNo ratings yet
- Pal A Charla 1997Document13 pagesPal A Charla 1997Gokul SubramaniNo ratings yet
- Parallelizing SystemC Kernel For Fast Hardware Simulation On SMP MachinesDocument8 pagesParallelizing SystemC Kernel For Fast Hardware Simulation On SMP MachinesNguyen Tuan AnhNo ratings yet
- VTK SMPDocument20 pagesVTK SMPDon PatroxNo ratings yet
- Acos: An Autonomic Management Layer Enhancing Commodity Operating SystemsDocument8 pagesAcos: An Autonomic Management Layer Enhancing Commodity Operating SystemsDavide BartoliniNo ratings yet
- D R - E P G D: Esigning UN Time Nvironments To Have Redefined Lobal YnamicsDocument16 pagesD R - E P G D: Esigning UN Time Nvironments To Have Redefined Lobal YnamicsAIRCC - IJCNCNo ratings yet
- Energy-Aware Distributed Simulation For Mobile Platforms: An Empirical StudyDocument21 pagesEnergy-Aware Distributed Simulation For Mobile Platforms: An Empirical StudyFahad MaqboolNo ratings yet
- HC-Sim: A Fast and Exact L1 Cache Simulator With Scratchpad Memory Co-Simulation SupportDocument10 pagesHC-Sim: A Fast and Exact L1 Cache Simulator With Scratchpad Memory Co-Simulation SupportSebastian De la Paz IIINo ratings yet
- Stock Market Prediction Using MLDocument4 pagesStock Market Prediction Using MLFatima-Ezzahra AINo ratings yet
- Intelligent Architectures For Intelligent Computingsystems Invited Paper DATE21Document6 pagesIntelligent Architectures For Intelligent Computingsystems Invited Paper DATE21prarthanaitsmeNo ratings yet
- A System Bus Power: Systematic To AlgorithmsDocument12 pagesA System Bus Power: Systematic To AlgorithmsNandhini RamamurthyNo ratings yet
- An Operating System Architecture For Organic ComputingDocument15 pagesAn Operating System Architecture For Organic ComputingBill PetrieNo ratings yet
- A Hardware/Software Framework For Supporting Transactional Memory in A Mpsoc EnvironmentDocument8 pagesA Hardware/Software Framework For Supporting Transactional Memory in A Mpsoc Environmentvijaypraveen1986No ratings yet
- Accelerate Cycle-Level Full-System Simulation of Multi-Core RISC-V Systems With Binary TranslationDocument7 pagesAccelerate Cycle-Level Full-System Simulation of Multi-Core RISC-V Systems With Binary TranslationzarkurayyNo ratings yet
- Stock Market Prediction Using MLDocument4 pagesStock Market Prediction Using MLAkash GuptaNo ratings yet
- Scimakelatex 28344 Tamsi+ron Zerge+Zita Bna+BlaDocument6 pagesScimakelatex 28344 Tamsi+ron Zerge+Zita Bna+BlaJuhász TamásNo ratings yet
- Formal Verification of Distributed Dynamic Thermal ManagementDocument8 pagesFormal Verification of Distributed Dynamic Thermal ManagementFaiq Khalid LodhiNo ratings yet
- Kerrighed and Parallelism: Cluster Computing On Single System Image Operating SystemsDocument10 pagesKerrighed and Parallelism: Cluster Computing On Single System Image Operating SystemsPercival Jacinto Leigh511No ratings yet
- RecordDocument132 pagesRecordHareesh MadathilNo ratings yet
- Enabling Technologies For Self-Aware Adaptive SystemsDocument8 pagesEnabling Technologies For Self-Aware Adaptive SystemsRaoul BitenboisNo ratings yet
- Automated Modeling and Practical Applications of Systems Described by The AggregatesDocument6 pagesAutomated Modeling and Practical Applications of Systems Described by The AggregatesoveiskntuNo ratings yet
- Simulation For Multiprocessor Real-Time Scheduling EvaluationDocument6 pagesSimulation For Multiprocessor Real-Time Scheduling EvaluationHareesh ArjunNo ratings yet
- Petri Nets Tutorial for Industrial ApplicationsDocument17 pagesPetri Nets Tutorial for Industrial Applicationssubramanya1982No ratings yet
- Intelligent Web Caching Using Neurocomputing and Particle Swarm Optimization AlgorithmDocument6 pagesIntelligent Web Caching Using Neurocomputing and Particle Swarm Optimization AlgorithmHny Henny HennyNo ratings yet
- Discrete Event SimulationDocument140 pagesDiscrete Event Simulationssfofo100% (1)
- Wireless Cellular Technologies For Enhancement of Spectral Density at Reduced CostDocument14 pagesWireless Cellular Technologies For Enhancement of Spectral Density at Reduced Costadmin2146No ratings yet
- Factors Influencing Consumer Adoption of Online Banking in MalaysiaDocument7 pagesFactors Influencing Consumer Adoption of Online Banking in MalaysiaMingyur InlezzNo ratings yet
- Introduction To DESDocument129 pagesIntroduction To DESSanja Lazarova-MolnarNo ratings yet
- 5 Generation Wireless Communication Revolution: Shafiqul Abidin, Mohd Izhar, Vikas Rao VadiDocument4 pages5 Generation Wireless Communication Revolution: Shafiqul Abidin, Mohd Izhar, Vikas Rao Vadishukri aden madeyNo ratings yet
- Application Projects Title ListDocument17 pagesApplication Projects Title Listshukri aden madeyNo ratings yet
- Trace Driven Simulation Using Sampled Traces C.: Fu Jan&Document10 pagesTrace Driven Simulation Using Sampled Traces C.: Fu Jan&shukri aden madeyNo ratings yet
- Chapter 3: Research MethodologyDocument13 pagesChapter 3: Research Methodologyshukri aden madeyNo ratings yet
- Factors Influencing Consumer Adoption of Online Banking in MalaysiaDocument7 pagesFactors Influencing Consumer Adoption of Online Banking in MalaysiaMingyur InlezzNo ratings yet
- Documentation On Bank Management SystemDocument43 pagesDocumentation On Bank Management Systemshukri aden madeyNo ratings yet
- PresentationDocument27 pagesPresentationBinoj S RajNo ratings yet
- Resume - AJAY - 8+yearsDocument5 pagesResume - AJAY - 8+yearsRajesh jainNo ratings yet
- Parts Catalog PDFDocument71 pagesParts Catalog PDFJesus PerezNo ratings yet
- U48-4 U55-4 PDFDocument799 pagesU48-4 U55-4 PDFDavid Solis100% (10)
- Chapter 9 Case Study: Nightingale ProjectDocument6 pagesChapter 9 Case Study: Nightingale Projectsam chanNo ratings yet
- Operating Instructions Maintenance Manual - Maxum Ed. II - 06.2008Document598 pagesOperating Instructions Maintenance Manual - Maxum Ed. II - 06.2008Nicolae VisanNo ratings yet
- CMS Ordering GuideDocument62 pagesCMS Ordering GuideLuis Angel Cortes BuitragoNo ratings yet
- Cisco Data Center Infrastructure 2.5 Design GuideDocument180 pagesCisco Data Center Infrastructure 2.5 Design GuideIsaac Ferreras DominguezNo ratings yet
- Encryption KeysDocument6 pagesEncryption KeysCoty FigueroaNo ratings yet
- Best Known Methods For Installing or Upgrading The Core Server To LDMS 8Document52 pagesBest Known Methods For Installing or Upgrading The Core Server To LDMS 8api-3840339No ratings yet
- 1instnex r42 enDocument618 pages1instnex r42 enSilistraNo ratings yet
- XLR HistoryDocument4 pagesXLR HistoryvkinayNo ratings yet
- Detail Produk Epson l360Document2 pagesDetail Produk Epson l360Abdul Rakhmat MuzakkirNo ratings yet
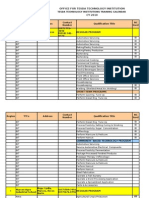
- TESDA Technology Institution Training Calendar for 2010Document824 pagesTESDA Technology Institution Training Calendar for 2010ferdinandz_010100% (1)
- M1 Slides Core Infrastructure ServicesDocument75 pagesM1 Slides Core Infrastructure ServicesTrifon ShterevNo ratings yet
- Eng e WDocument4 pagesEng e WRAM KUMARNo ratings yet
- Ganago Student Lab3Document28 pagesGanago Student Lab3Ola FondaNo ratings yet
- Rab StudioDocument29 pagesRab StudioMuhammad Ridwan AkbarNo ratings yet
- Instruction Manual For Dodge Raptor Spacer Couplings: Install HubsDocument12 pagesInstruction Manual For Dodge Raptor Spacer Couplings: Install HubsDiego Fernando Cabal CasanovaNo ratings yet
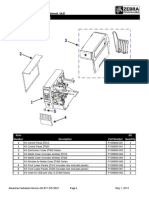
- Zt400 Parts Catalog en UsDocument11 pagesZt400 Parts Catalog en UsddeppenjrNo ratings yet
- P 615 SN 4147526Document52 pagesP 615 SN 4147526Dan Alin MirceaNo ratings yet
- CNC Router DeatilsDocument4 pagesCNC Router DeatilsPanneer Selvam EaswaranNo ratings yet
- DHT 11Document12 pagesDHT 11Raja Fathurrahim AkmaludinNo ratings yet
- 6ra24 Manual UsaDocument406 pages6ra24 Manual UsaBernd ReuterNo ratings yet
- 250 Complete Man Issue - C20-OMM PDFDocument16 pages250 Complete Man Issue - C20-OMM PDFouss18No ratings yet
- GWA Calculator by FilipiKnowDocument14 pagesGWA Calculator by FilipiKnowMJ HagosNo ratings yet
- Scope of Work Elevator MaintenanceDocument16 pagesScope of Work Elevator MaintenanceRodolfo ValençaNo ratings yet
- Debug 1214dfdfsfDocument3 pagesDebug 1214dfdfsfyusrimaturriskaNo ratings yet
- Autodesk Fusion 360: 2D Milling GuideDocument39 pagesAutodesk Fusion 360: 2D Milling GuideSapril ArikanoshikiNo ratings yet
- Upgrade Autocom 2011manualDocument9 pagesUpgrade Autocom 2011manualRolando Bass WernerNo ratings yet
- 23 Sensor Pressure SwitchDocument28 pages23 Sensor Pressure SwitchموهاجيرينNo ratings yet