You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5819)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- RLC 1st ManualDocument141 pagesRLC 1st Manualjaved shaikh chaand100% (1)
- 7SJ80 CatalogueDocument30 pages7SJ80 Cataloguejigyesh sharmaNo ratings yet
- Realtime Wavelet Detection FaultDocument6 pagesRealtime Wavelet Detection FaultJuan CarlosNo ratings yet
- Fault Detection On Radial Power DistributionDocument15 pagesFault Detection On Radial Power DistributionJuan CarlosNo ratings yet
- Coordination of Overexcitation Limiter, Field Overcurrent Protection and Generator ControlDocument7 pagesCoordination of Overexcitation Limiter, Field Overcurrent Protection and Generator ControlJuan CarlosNo ratings yet
- Electrical Engineering: International Review of (IREE)Document11 pagesElectrical Engineering: International Review of (IREE)Juan CarlosNo ratings yet
- Fault Location Smartgrid 2017Document16 pagesFault Location Smartgrid 2017Juan CarlosNo ratings yet
- 2015 Fault Location Identification in Smart Distribution Networks With Distributed GenerationDocument143 pages2015 Fault Location Identification in Smart Distribution Networks With Distributed GenerationJuan CarlosNo ratings yet
- Fault Location in Radial Distribution Lines Using Travelling Waves and Network TheoryDocument6 pagesFault Location in Radial Distribution Lines Using Travelling Waves and Network TheoryJuan CarlosNo ratings yet
- Introduction Feb10103Document6 pagesIntroduction Feb10103Junaidi Haji KarmanNo ratings yet
- OPzV Standby WebDocument2 pagesOPzV Standby Webemilio26aNo ratings yet
- Maintenance Handbook On Earthing & Surge Protection For S&T InstallationsDocument48 pagesMaintenance Handbook On Earthing & Surge Protection For S&T InstallationsHendrias Ari Sujarwo100% (3)
- Pricelist-Eaton-Cooper Bussman Fuses 2017Document23 pagesPricelist-Eaton-Cooper Bussman Fuses 2017Sukhirthan SenthilkumarNo ratings yet
- Lecture 1 - 2 - Pptweek1 - DR Krishan Kumar 22397Document80 pagesLecture 1 - 2 - Pptweek1 - DR Krishan Kumar 22397priyanshuthegamer143301No ratings yet
- EPowerControl UserManual enDocument94 pagesEPowerControl UserManual enKatlego Seleofeng RahubeNo ratings yet
- Protection Earth Leakage: "Si" and "Sie" Type, A & Ac Class RCCBDocument3 pagesProtection Earth Leakage: "Si" and "Sie" Type, A & Ac Class RCCBa_miticNo ratings yet
- Induction Motor Scalar ControlDocument27 pagesInduction Motor Scalar ControlasksivaNo ratings yet
- Electricity Supply Code and Related Matters NewDocument64 pagesElectricity Supply Code and Related Matters Newરામ પ્રતાપNo ratings yet
- KeraunDocument2 pagesKeraundarshanNo ratings yet
- BATELEC I - 2023 2032 PSPP - GridDocument21 pagesBATELEC I - 2023 2032 PSPP - GridJULIA RUSSEL CANDORNo ratings yet
- 320 - 380kVA Spec SheetDocument4 pages320 - 380kVA Spec SheetRajan LakshmananNo ratings yet
- Interrupting and Restoring Power: (A Distribution Utility Perspective)Document179 pagesInterrupting and Restoring Power: (A Distribution Utility Perspective)Francis Jade PutisNo ratings yet
- 1 - Power Electronics CatalogueDocument83 pages1 - Power Electronics CataloguerockNo ratings yet
- Cooling With Solar Power bd35f-bd35k 09-2010 pn100b202 PDFDocument2 pagesCooling With Solar Power bd35f-bd35k 09-2010 pn100b202 PDFMMMOH200No ratings yet
- Top242 250 9213Document53 pagesTop242 250 9213Léo MineliNo ratings yet
- Hydro China Dawood Wind FarmDocument3 pagesHydro China Dawood Wind FarmSPIKELET CRAFTSNo ratings yet
- Deger Toptracker 8.540nt 6.1 AsDocument2 pagesDeger Toptracker 8.540nt 6.1 AseldiavoloNo ratings yet
- Complete Engineering Review & Training Center: Weekly Exam 6Document1 pageComplete Engineering Review & Training Center: Weekly Exam 6Hary KrizNo ratings yet
- Shihlin Inverter Technical Manual ANI00007Document40 pagesShihlin Inverter Technical Manual ANI00007Ruiyat islamNo ratings yet
- Automatic Room Lights: Click Here For The Circuit DiagramDocument2 pagesAutomatic Room Lights: Click Here For The Circuit Diagrampramod71No ratings yet
- Tarub E 1 - 1: Engr. Aladin John R. Seludo Prof. Marc Adel A. NositeraDocument1 pageTarub E 1 - 1: Engr. Aladin John R. Seludo Prof. Marc Adel A. NositeraijoidigkNo ratings yet
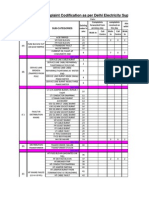
- Complaint Codification As Per Delhi Electricity Supply CodeDocument12 pagesComplaint Codification As Per Delhi Electricity Supply CodedcvashistNo ratings yet
- Ellipse Pro 614-06817-03Document80 pagesEllipse Pro 614-06817-03Maikel WilkeNo ratings yet
- Best Presentation On VFDDocument68 pagesBest Presentation On VFDWaseem Hashmat89% (9)
- Solar Energy CaseDocument4 pagesSolar Energy CaseYash GuptaNo ratings yet
- 12V 100ah Osaka Lithium Iron Phosphate Deep Cycle (Lifepo4) BatteryDocument2 pages12V 100ah Osaka Lithium Iron Phosphate Deep Cycle (Lifepo4) BatteryBrandon NaidooNo ratings yet
- 3x1Kw Geysers 3000 100% 3000: 1KW For Each Square or Part of A 100 SquareDocument2 pages3x1Kw Geysers 3000 100% 3000: 1KW For Each Square or Part of A 100 SquareShuaibSolomonNo ratings yet