Professional Documents
Culture Documents
An Excitation Spectrum Criterion For The Vibration-Induced Fatigue
Uploaded by
Rajesh RagoobirOriginal Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
An Excitation Spectrum Criterion For The Vibration-Induced Fatigue
Uploaded by
Rajesh RagoobirCopyright:
Available Formats
Proceedings of IMECE2002
Proceedings of IMECE2002
ASME International
ASME International Mechanical Mechanical Engineering
Engineering Congress
Congress & Exposition
& Exposition
November 17–22, 2002 New Orleans,
November 17–22, 2002, New Orleans, Louisiana Louisiana
IMECE2002-32847
IMECE2002-32847
AN EXCITATION SPECTRUM CRITERION FOR THE VIBRATION-INDUCED FATIGUE
OF SMALL BORE PIPES
Pierre Moussou
Pierre.Moussou@edf.fr
EDF R&D - Analysis in Mechanics and Acoustics Department
1, avenue du Général de Gaulle 92 141 Clamart France
ABSTRACT
The purpose of the study is to determine an easy-to-use criterion The velocity spectrum criterion appears less penalizing than the
to evaluate the risk of vibration induced fatigue of small bore 12 mm/s criterion and more conservative than the strict
pipes. enforcement of the ANSI-OM3 standard.
The failure mechanism considered is the resonant amplification Comparisons with former studies show that the velocity
of a stationary broadband excitation of the main pipe by natural spectrum criterion leads to the correct fatigue diagnosis.
modes of the small bore pipe, leading to bending stresses above
the fatigue limit of the steel.
INTRODUCTION
Based on the Euler beam theory, a simple model is built up for Several failures of small bore piping systems occurred in
the natural mode shapes of the small bore pipe close to its root. the French nuclear power plants in the past years because of
It is shown that the velocity spectrum at the root of the small fatigue due to flow-induced vibrations [1,2]. Evaluation of the
bore pipe is equal to the RMS value of the bending stress risk of fatigue failure is then required for the small bore pipes in
multiplied by a function of the natural frequency, the damping steady operating conditions.
coefficient, the speed of elastic waves in the steel, the Young Expertise methods for the vibrations of small bore pipes
modulus and a non-dimensional factor weakly depending on the such as modal analysis and operating deflection shapes analysis
geometry of the small bore pipe. are well established nowadays [3]. The control of small bore
pipes is yet an issue because of their large number in safety
A maximum velocity spectrum can then be deduced, assuming related systems. Time-consuming methods of expertise cannot
that a small bore pipe vibrates mainly on its natural mode be used, and simple criteria are requested to optimize control
shapes. The maximum excitation spectrum is defined for each operations.
frequency f as the one which would generate a maximum Technically speaking, the main difference between main
bending stress equal to the endurance limit of the steel, would pipes and small bore pipes vibrations is that the excitation
the small bore pipe have a natural frequency equal to f. sources of the small bore pipes are forced displacements, with a
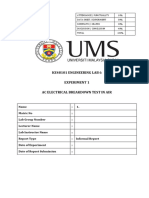
Using envelope values of the dimensional factor, the stress rather complicated spectrum as shown in Figure 1 (the spectrum
intensification factor, the peak factor and the endurance limit of shown is the square root of the Power Density Spectrum of the
the steel, one obtains the following maximum velocity spectrum velocity, expressed in mm/s.sqrt(Hz)). As can be seen, the
for the stainless steel : excitation spectrum of a small bore pipe can exhibit a
v < 6 mm / s / sqrt(f) significant level up to 400 Hz, with several modes.
The usual control technique for the vibrations of piping
and the following maximum velocity spectrum for the ferritic
systems is the application of ANSI-OM3 criteria [4,5,6]. Based
steel :
on the theory of vibrating beams, it stipulates that if the RMS
v < 2.7 mm / s / sqrt(f)
velocity everywhere on a pipe is lower than a value depending
on the pipe parameters, there is no risk of fatigue failure.
1 Copyright © 2002 by ASME
Downloaded From: https://proceedings.asmedigitalcollection.asme.org on 05/06/2019 Terms of Use: http://www.asme.org/about-asme/terms-of-use
10 Velocity spectrum
Furthermore, a RMS velocity measurement on a small bore
(mm/s/sqrt(Hz)) pipe provides a reasonably fair estimation of the stress, but it
can hardly provide information about the source of the
vibrations, i. e. the vibration pattern of the main pipe. A broad
1 band vibration of the main pipe due to valve cavitation could
generate a small bore pipe vibration mode similar to the one a
sharp peak of pump passing blade would generate. Yet, in the
first case, the small bore pipe would be exposed to vibrational
0.1
fatigue whatever its natural frequencies, while in the second
case, a small modification (addition of small mass for instance)
would be enough to decrease its vibration by a factor of ten.
At last, a velocity of 5 mm/s measured on a small bore pipe
could hide a risk of coincidence with a main pipe natural
0.01
frequency: a small change in the operating conditions could be
0 100 200 300 400 500
enough to generate a high vibration level in the small bore pipe.
Frequency (Hz)
There are then three reasons for developing a criterion
Figure 1: typical velocity spectrum at the root of a based on the spectrum of the excitation:
small bore pipe in a safety piping system 1. a single measurement at a predefined position is easy to
handle,
2. the velocity spectrum at the root of the small bore pipe
can be related to operating conditions whereas the
maximal RMS velocity of the small bore pipe can
hardly be interpreted,
3. a RMS measurement on the small bore pipe according
to ANSI-OM 3 standard may hide the risk of a
coincidence between a main pipe mode and a small
bore pipe mode.
NOMENCLATURE
C1 non-dimensional coefficient of the ANSI-OM3,
describing the influence of concentrated masses
and varying from 0.25 to 1
C3 non-dimensional coefficient of the ANSI-OM3,
describing the added mass factor (water), varying
from 1 to about 1.3 for small bore pipes
C4 non-dimensional coefficient of the ANSI-OM3,
Figure 2: a complicated small bore pipe layout in a
describing the velocity to stress ratio as a function
safety piping system
of the layout and varying from 0.7 to 1.33
csteel speed of the compression waves in steel, equal to
In a similar approach, a widespread rule of thumb stipulates
that a pipe which vibrates below 12 mm/s is not exposed to (E/ρsteel)½ : 5000 m/s for current steel.
vibration-induced fatigue. E Young modulus of the steel (MPa)
There is yet no indication in the ANSI-OM 3 standard to f frequency (Hz)
determine the location of the maximal velocity on complicated fn natural frequency of the small bore pipe (Hz)
small bore pipes, such as the one reproduced in Figure 2. The F shear force spectrum in the small bore pipe
on-site technician has then to determine by himself the maximal ( N / Hz )
velocity point of the small bore pipe. This can be a time- Fpeak peak factor: ratio of the maximum value to the
consuming operation: for instance, the small bore pipe RMS value of the stress, equal to 3.5
reproduced in Figure 2 would require at least six to seven points G( u ) non-dimensional elastic energy in the root of the
of measurement in the three directions in order to determine the small bore pipe, equal to:
very location where the velocity is maximum. Besides, such an cos 2u e −2u
operation may be difficult to achieve whenever a highly G ( u) = u + − 2e − u sin u −
2 2
radioactive environment surrounds the small bore pipe.
2 Copyright © 2002 by ASME
Downloaded From: https://proceedings.asmedigitalcollection.asme.org on 05/06/2019 Terms of Use: http://www.asme.org/about-asme/terms-of-use
i stress intensification factor, equal to 2.1 for a there might be a risk, and further evaluation is required to
socket welding and 1.8 for a butt welding determine whether corrective actions should be undertaken.
4
Rout − Rin4 The failure mechanism considered is the resonant
I main pipe inertia, equal to π (m4) amplification of a stationary broadband excitation of the main
4
pipe by natural modes of the small bore pipe, leading to
K dimensional coefficient equal to E/αcsteel (MPa.s/m) bending stresses above the fatigue limit of the steel. The
k bending wavenumber (m-1), defined by: EI k4 = λω² vibrations of a pipe due to a pure harmonic excitation such as a
L straight length of the small bore pipe (m) the running speed of a pump is not investigated either ; other
lv length of the valve(m) techniques [7] should be applied in this case.
M bending moment spectrum in the small bore pipe Neither transient processes nor static deformations are
( N / m Hz ) investigated here.
Rout outer radius of the small bore pipe (m) The small bore pipes are supposed to vibrate under the
Rin inner radius of the small bore pipe (m) action of main pipe displacements only. No inner source of
u non-dimensional space coordinate, defined as excitation is considered.
u = kx
Vall allowable RMS velocity according to the ANSI-
OM3 standard
vmax maximum velocity spectrum in the small bore pipe CALCULATIONS
( m / s Hz )
vroot velocity spectrum at the root of the small bore pipe Calculation scheme
( m / s Hz ) The starting point is the following idea: when a piping
x abscissa along the small bore pipe (m) system is submitted to stationary flow-induced vibrations, a
y bending deflection spectrum along the small bore small bore pipe vibrates mainly on its natural modes. The
vibration level of the small bore pipe can be harmless, provided
pipe ( m / Hz ) that the excitation, i.e. the main pipe displacement, remains low
enough.
α non-dimensional factor, varying from 0.2 to 0.3 for The issue is then to determine the maximum velocity
1 ρ steel I spectrum that a small bore pipe can tolerate at its root, in the
usual pipes, defined as: α€=
2 λRout2 range of frequencies close to its natural frequency. The steps of
the calculation are the followings:
η structural damping of the small bore pipe 1. determination of the mode shape of a small bore pipe,
λ mass per unit length of the small bore pipe, equal 2. determination of the deflection amplitude as a
2 2
to: πρ steel ( Rout − Rin ) + πρ water Rin2 (kg/m) function of the excitation spectrum using the energy
ρsteel steel density, equal to 7800 kg/m³ balance of the system: the dissipation due to the
damping balances the power provided by the main
ρwater water density, equal to 1000 kg/m³
pipe movements,
σlim fatigue limit of the steel (at 1011 cycles), equal to 52
3. determination of the RMS stress as a function
MPa for ferritic steel and 114 MPa for austenitic
of the excitation spectrum,
steel
4. elaboration of a criterion using the expression of the
σ0 beam bending stress spectrum at the root of the
RMS stress, the peak factor and the stress
small bore pipe ( MPa / Hz ) intensification factor.
ω pulsation (rad/s), equal to 2πf
Hypotheses and assumptions
The small bore pipe is modeled as shown in Figure 3. The
SCOPE OF THE STUDY hypotheses are the followings:
The study presented hereafter deals with the fatigue risk • the small bore pipe excitation is the lateral displacement
evaluation of a small bore pipe in a given set of operating imposed at its root,
conditions. The input data of this evaluation are the velocity • most of the elastic energy of the small bore pipe is localized
measurements in the operating conditions assumed to be the in a straight part of length L starting from its root,
most damaging for the small bore pipe ; how to determine these • the deflection shape of the small bore pipe is similar to a
damaging conditions is beyond the scope of the present paper. mode shape,
The proposed criterion is to be used as a screening one: if a • the Tresca stress is maximal at the root of the small bore
small bore pipe excitation remains below the threshold pipe,
spectrum, there is no risk of fatigue failure. In the opposite case,
3 Copyright © 2002 by ASME
Downloaded From: https://proceedings.asmedigitalcollection.asme.org on 05/06/2019 Terms of Use: http://www.asme.org/about-asme/terms-of-use
• an elbow, i.e. a very flexible element where a zero
Straight part of the s m all bore pipe moment condition can be assumed,
Run pipe: • a valve with a much larger mass and a smaller
forced size than the tube’s ones, so that the bending moment
dis placem ent
at the root of the small bore pipe is only due to the
yL valve acceleration. Hence, the bending moment at the
y0 Socket center of gravity of the valve can be neglected.
y0
L • A support generating a pinned condition,
which is similar to a clamped condition seen from the
Figure 3: small bore pipe schematic drawing left side.
• the Tresca stress is equal to the bending stress at the root of The three possible boundary conditions provide the
the small bore pipe, following relations between the length L of the straight part of
• the main pipe compliance is equal to zero, so that the angle the small bore pipe and the wavenumber k for the first natural
of deflection of the small bore pipe is zero at its root. mode of the small bore pipe:
• zero moment condition (see Fig. 5) :
kL = 1
• valve with a half length lv (see Fig. 6): the
Mode shape of the small bore pipe bending moment is a linear function of the abscissa x,
As indicated, we assume the deflection shape of the straight and it is equal to zero for x = L + lv. Hence we get :
part of the pipe to be almost identical to a mode shape, that is a k(L + lv) = 1
shape with a clamp condition on the right side: the main pipe • pinned or clamped condition (see Fig.8): kL ~ 4
movement is neglected in this part of the study.
The velocity spectrum and the bending moment are The straight pipes are at least as long as the valves, so that
basically complex spectra. As all physical values are to be in all the aforementioned situations, we have :
expressed as functions of σ0, we demand σ0 to be real, and all 0.5 < kL < 4
other spectra to have their phase referenced to σ0. For the sake This relation is valid for the first natural mode, and kL is of
of simplicity, the modulus symbol is omitted in the following course at least equal to 0.5 for higher modes.
when no confusion can occur. Nondimensional deflection : sin(kx)-cos(kx)+exp(-kx)
It is shown in Appendix 1 that for a given frequency, the Nondimensional moment -sin(kx)+cos(kx)+exp(-kx)
2
mode shape of the straight pipe complying with a clamp
condition on the left can be estimated as:
v( x) σ 1
= α 0 ( exp( − kx ) − cos( kx ) + sin( kx ) ) (1)
csteel E kL ~ 4 for a
and the bending moment is expressed as: 0 pinned condition
on the right side
Iσ 0
M (x) = ( exp( − kx ) + cos( kx ) − sin( kx )) kL ~ 1 for a
2 Rout -1
zero moment
where: csteel is the speed of sound in the steel condition on
the right side
α is a non-dimensional parameter, varying from 0.2 to -2
0.3 0 1 2 3 4
σ0 is the bending stress spectrum at the root of the Non-dimensional abscissa kx
small bore pipe Figure 4: small bore pipe deflection and moment
k is related to the pulsation ω by the dispersion
ω
equation: k2 =
2α csteel Rout elbow to the right:
zero moment at kL = 1
The deflection shape and the bending moment of the
straight part of the small bore pipe are shown in Figure 4. These
expressions are assumed to be valid for a wide range of
boundary conditions as shown in Figures 5 to 7. The underlying
idea is that in most practical cases, the initial straight part of 0 0.5 kx 1
length L of the small bore pipe is followed either by:
Figure 5: mode shape for an elbow on the right side
4 Copyright © 2002 by ASME
Downloaded From: https://proceedings.asmedigitalcollection.asme.org on 05/06/2019 Terms of Use: http://www.asme.org/about-asme/terms-of-use
The rate of energy flow to the small bore pipe Pin is equal
to the shear force F0 multiplied by the velocity vroot at the base.
Using complex notations, we get for a given wavenumber k and
eccentred mass to the right: zero a given frequency f the following expression of the rate of
moment at L energy flow:
kL = L/(L + lv) 1
(
Pin = Re F0*v root = 0
2
σ Ik
2 Rout
) v root
L
The rate of dissipation Pdis due to damping can be
lv estimated using a mass spring analogy as in reference [8]. It is
shown that the dissipation of energy during one cycle is related
0 0.2 0.4 0.6 0.8 kx to the total energy Ut and the structural damping coefficient η
by:
Figure 6: mode shape for a valve on the right side energy dissipated = 4π η total energy
The rate of dissipation Pdis is equal to the energy dissipated
support at L : during one cycle divided by the duration of the cycle:
kL ~ 4 Pdis = 4πη f U t
We now need an estimation of the total energy of the small bore
pipe. It is well known that the total energy is equal to the double
of the elastic energy [9] for the natural modes of a linear
oscillator. Assuming that all the elastic energy of the small pipe
is due to the bending of the straight pipe of length L, we get:
0 1 2 kx 3 4 L kL 2
M2 1 M2 1 1 σ0I
Figure 7: mode shape for a support on the right side Ut = ∫ EI
dx =
k ∫ EI
d ( kx ) = G ( kL)
k EI 2 Rout
0 0
kL
4
Non dimensional energy G(kL) where G ( kL ) = ∫ (exp( − u) + cos( u) − sin( u)) 2 du can be
3 0
solved analytically (see nomenclature for its expression). It is
pinned
2 shown in Figure 8 : as can be seen, it varies from 1.35 to 4 for
condition on
the right
kL varying from 0.5 to 4. The dissipated power can then be
1 Non -dimensionnal deflection expressed as:
side
2
0 4πη f 1 σ 0 I
Pdis = G ( kL)
k EI 2 Rout
-1 zero moment Non -dimensionnal moment
condition on
In steady regime, the rate of energy flow balances the
-2 the right side dissipation. By equating Pin and Pdis and dropping the modulus
0 1 2 3 4
symbol, we get:
Non-dimensional abscissa kx η ω σ0
G ( kL) = v root
Figure 8: non-dimensional energy of the small bore k 2 E Rout
pipe Using the dispersion relation, we remove the term ω/k² and
finally get:
σ v
Energy balance of the deflection shape 2αG ( kL) 0 = root (2)
E ηcsteel
We assume the structural damping of the small bore pipe to
The above equation contains the fatigue criterion in a
be small (typically lower than 1%) so that the velocity at the
nutshell: the relation between the bending stress and the forced
root is much smaller than the velocity at distance L. The shear
force spectrum at the root is then almost equal to its modal velocity depends only on the damping, on two factors α and G
value : roughly constant and on physical constants. Velocity appears
here as a natural estimator of the bending stress; this feature is
σ Ik
F0 = 0 the base of velocity-based criterion for the control of piping
Rout system vibrations [5, 10].
5 Copyright © 2002 by ASME
Downloaded From: https://proceedings.asmedigitalcollection.asme.org on 05/06/2019 Terms of Use: http://www.asme.org/about-asme/terms-of-use
RMS stress due to a broadband excitation
Equation (2) relates the root velocity spectrum to the root • Fpeak being the ratio of the temporal maximal stress to
bending stress spectrum. In order to get an estimation of the the RMS stress, conventionally taken equal to 3.5
physical stress, i.e. a stress expressed in MPa, we have to [12,13,14]
perform an integration of the bending stress spectrum in the • σlim being the fatigue limit of the steel : the B-curve of
frequency range close to the natural frequency fn of the small the ASME tables indicates 114 MPa for stainless steel
bore pipe. Let us assume that the excitation spectrum vroot(f) is and 52 MPa for austenitic steel for 1011 cycles.
roughly constant in the frequency range surrounding the natural
frequency. Using again a mass-spring analogy, it is easily shown This criterion is easily expressed for the root velocity as:
that for a frequency close to fn, the stress spectra and the 1 2α ηG ( kL) csteel σ lim
velocity spectra are related by: v root ( f n ) ≤ (3)
fn π E iFpeak
Kvroot ( f n )
σ0( f ) = Let us now define a general fatigue criterion based on the
f 2
1 − + 2 jη above expression. The threshold spectrum should exhibit the
f n2 following property: if the velocity spectrum at the root of the
K being a dimensional constant, which can be determined using small bore pipe is lower than the threshold, there is no risk of
the equation (2) for f = fn. We thus get: vibration-induced fatigue failure. According to the preceding
E v root ( f n ) concepts, fatigue can occur if the velocity spectrum exceeds the
σ0 ( f ) = expression (3) at a natural frequency of the small bore pipe. In a
αG ( kL) csteel f 2
1 − + 2 jη penalizing approach, we can assume that the worst situation
f n2 occurs when two natural frequencies are simultaneously
involved. A screening criterion can thus be proposed by
For small values of the damping coefficient, most of the RMS
stress is due to the frequencies close to fn. Integrating the square dividing the expression (3) by a factor 2 so that the quadratic
modulus of the above expression, we get: summation of the stresses associated with the two natural
frequencies does not exceed the fatigue limit of the steel.
Ev root ( f n ) df
αG ( kL) csteel ∫
σ 0RMS ≈ A further step is needed to define a layout-independent
2
f 2 criterion. This is achieved by demanding the root velocity to be
1 − + 4η2
lower than the expression (3) divided by the factor 2 for any
f n2
value of the frequency fn. Hence, whatever its natural
A fair approximation of the above integral is πfn/4η so that we frequencies, a small bore pipe is not exposed to fatigue failure if
finally get: the root velocity spectrum fulfills the following condition:
Ev root ( f n ) π f n 1 α 2ηG ( kL) csteel σ lim
σ 0RMS ≈ v root ( f ) ≤ (4)
αG ( kL) csteel η 2 f π E iFpeak
The RMS stress is related to the root velocity spectrum by
a factor depending upon the damping coefficient, upon the two The equation (4) is a screening fatigue criterion for small
roughly constant factors G and α, and upon the square root of bore pipes, expressed using root velocity spectrum
the frequency. This last dependency appears self-evident measurements.
according to dimensional considerations.
Parameters Ferritic Stainless Units
Fatigue criterion expression steel steel
The expected lifetime of a nuclear power plant being of η 5.10-3 5.10-3
several tens of years, and the natural frequencies of small bore csteel 5000 5000 m/s
pipes ranging from 10 to 200 Hz, the evaluation of the failure E 2.105 2.105 MPa
risk should be based on high-cycle fatigue. Following the same α 0.2 0.2
approach as in the ANSI-OM3 standard, we define the fatigue G(kL) 1.35 1.35
criterion for the RMS beam stress at the root of the small bore σlim 52 114 MPa
pipe the following way: i 2.1 2.1
σ Fpeak 3.5 3.5
σ 0RMS ≤ lim
iFpeak
vroot(f) f 2.7 5.9 mm/sec
• i being the stress intensification factor (2.1 for a socket
welding and 1.8 for a butt welding), Table 1: proposed coefficients of the criterion
6 Copyright © 2002 by ASME
Downloaded From: https://proceedings.asmedigitalcollection.asme.org on 05/06/2019 Terms of Use: http://www.asme.org/about-asme/terms-of-use
Suggested values of the coefficients of the equation (4) are C4 varies from 0.7 to 1.33 and stands for the velocity
given in table 1 for socket-welding small bore pipes. Using to stress ratio as a function of the layout.
these values, the criterion can be written for the stainless steel :
6 mm / s
v root ( f ) ≤ Case of a straight pipe with a small heavy valve
f
Let us consider a straight pipe with a valve at its end,
and for the ferritic steel : vibrating on its first natural mode. The valve is small compared
2.7 mm / s to the length of the tube, the diameter of the tube is 1’’ and the
v root ( f ) ≤
f structural damping coefficient is equal to 1%.
α is equal to 2.8, the natural frequency fn is associated to
kL = 1 (see Fig.6 for lv<<L) so that G(kL) = 1.5 (see Fig. 8)
and the maximum bending stress is equal to the fatigue limit if
HOW TO USE THE VELOCITY SPECTRUM CRITERION (equation 3):
The purpose of the velocity spectrum criterion is to 2 x 0.28x 0.01x1.35 5000 114
determine easily safe small bore pipes as regards their vroot ( f n ) f n = = 16.5 mm / s
π 2.1011 2.1x3.5
vibrations. It should be used the following way:
There is a margin factor of 2.8 between the actual fatigue
• if the root velocity spectrum is lower than the
criterion, the small bore pipe is safe, threshold and the 6 mm/s/ f criterion.
• if the root velocity spectrum crosses the
threshold, the small bore pipe might be exposed to The application of the ANSI-OM3 criteria gives :
vibration-induced fatigue. The risk depends on the 0.25x 0.7 13.4
frequency where the excitation crosses the threshold: Vall = 114 = 30 mm / s
35
. x12
. 2.1
the closer to a natural frequency, the higher the risk. For kL = 1, the non-dimensional deflection shape has a
Further investigation is then needed. maximum value equal to 0.7 (see Fig.4) and the maximum RMS
It must be highlighted that the criterion should be used with velocity is actually given by :
broadband vibrations, i.e. for peaks broader than a typical small
σ lim 1 114.10 6 0.7
bore pipe resonance. The criterion cannot be used for narrow Vall = αcsteel 0.7 = 0.28x5000 = 76 mm / s
iFpeak E . 2.1011
2.1x 35
excitations such as the one due to a pump passing blade
frequency. It is the author’s belief that a criterion for narrow There is a margin factor of 2.5 between the actual fatigue
excitations would be useless, because the current peaks would threshold and the ANSI-OM3 criteria. The margin factor of the
always be too high. Coincidence between the natural 12 mm/s is equal to 6.3 .
frequencies of the small bore pipes and the pump passing blade
frequency and its harmonics should be avoided.
Case of a straight pipe with a pinned condition
Let us now consider a straight pipe without any valve or
mass and a pinned condition at its end, vibrating on its first
COMPARISON WITH A MAXIMUM DEFLECTION natural mode.
APPROACH The diameter of the tube is 1’’ and the structural damping
In the present chapter, the velocity spectrum criterion is coefficient is equal to 1%. α is equal to 2.8, the natural
compared to deflection-based criteria. The reference values of frequency fn is associated to kL = 4 (see Fig.7) so that G(kL) = 4
the stress and the deflection are assumed to be correctly given (see Fig. 8) and the maximum bending stress is equal to the
by equation 1 and equation 3. fatigue limit if (equation 3):
2x 0.28x 0.01x 4 5000 114
ANSI-OM3 applied to small bore pipes v root ( f n ) f n = = 49 mm / s
π 2.1011 2.1x 35
.
An analysis of the ANSI-OM3 criteria can be found in
reference [6]. Applied to small bore pipes, the ANSI-OM3 There is a margin factor of 8 between the actual fatigue
allowable RMS velocity can be rewritten using the present threshold and the 6 mm/s/ f criterion.
paper’s notations:
C1C4 13.4 mm / s.MPa The application of the ANSI-OM3 criteria gives :
Vall = σ lim
Fpeak C3 i 1x 0.7 13.4
Vall = 114 = 120 mm / s
where C1 varies from 0.25 to 1 and stands for the influence of 35
. x12
. 2.1
the concentrated masses,
C3 varies from 1 to 1.3 and stands for the added mass
due to water
7 Copyright © 2002 by ASME
Downloaded From: https://proceedings.asmedigitalcollection.asme.org on 05/06/2019 Terms of Use: http://www.asme.org/about-asme/terms-of-use
For kL = 4, the non-dimensional deflection shape has a
2
maximum value equal to 1.5 (see Fig.4) and the maximum RMS
velocity is actually given by :
σ lim 1 114.10 6 15 . 1.5 Small bore pipe #2 : safe
Velocity spectrum
Vall = αcsteel 0.7 = 0.28x5000 = 163 mm / s
(mm/sec.sqrt(Hz))
iFpeak E . 2.1011
2.1x 35
There is a margin factor of 1.35 between the actual fatigue 1
threshold and the ANSI-OM3 criteria. The margin factor of the
12 mm/s is equal to 13.5.
The comparison made on both cases shows that the velocity 0.5
spectrum criterion appears less conservative than the 12 mm/s
criterion and more conservative than the strict enforcement of
the ANSI-OM3 standard. This should be considered as a trend : 0
the velocity spectrum criterion could be less conservative than 0 100 200 300 400 500
the ANSI-OM3 in the case of broad-band excitations, when the Frequency (Hz)
small bore pipe vibrates on several modes simultaneously.
Figure 10: root velocity measurement of small bore
pipe #2
VALIDATION 10 Small bore pipe #3: safe on two
The velocity spectrum criterion was evaluated using root
different plants and for three regimes
measurements of six small bore pipes for which a vibration-
induced fatigue diagnosis had already been made. These small Velocity spectrum
(mm/sec.sqrt(Hz))
1
bore pipes were located on different piping systems from
different nuclear plants, with different operating regimes, and
they had layouts of all types: straight pipes with a valve as well 0.1
as curved pipes with supports.
A fair agreement was found between the former diagnosis
and the application of the present paper’s criterion as shown in 0.01
the Figures 9 to 12, where the bold line is the velocity
threshold. As can be seen, the measured velocity spectrum
crosses the threshold for all the unsafe small bore pipes. 0.001
In Figure 11, three velocity spectra measured on two 0 100 200 300 400 500
different plants and in three different times are plotted. Though Frequency (Hz)
the velocity spectra are not identical, the diagnosis is the same
Figure 11: root velocity measurement of small bore
in the three cases.
pipe #3 on two different plants
2
1.8 3 Unsafe operating
1.6 Small bore pipe #1 : unsafe conditions
Velocity spectrum
(mm/sec.sqrt(Hz))
1.4 Safe operating
Velocity spectrum
(mm/s/racine(Hz))
1.2 2 conditions
1
0.8
0.6
1
0.4
0.2
0
0 100 200 300 400 500 0
Frequency (Hz) 0 100 200 300 400
Frequency (Hz)
Figure 9: root velocity measurement of small bore
pipe #1 Figure 12: root velocity measurement of small bore
pipe #4 on two different plants
8 Copyright © 2002 by ASME
Downloaded From: https://proceedings.asmedigitalcollection.asme.org on 05/06/2019 Terms of Use: http://www.asme.org/about-asme/terms-of-use
In Figure 12, two velocity spectra measured in two [6] Baratte, C., Tephany, F. and Payan, F. 1998 “An analysis of
different operating conditions are plotted. One of the operating the ASME ANSI-OM3 standard: calculation of the correction
conditions was safe, the other unsafe. factors for any piping layout at any mode range” Int. ASME
As mentioned before, the criterion does not hold for narrow PVP Conf. Dallas pp.1-15
excitations such as the one associated with a blade passing [7] von Nimitz, W. W. 1974 “Reliability and performance
frequency. Hence, the narrow peaks crossing the criterion assurance in the design of reciprocating compressor
threshold in Figures 10 and 11 should be disregarded, because a installations. Part 1 - Design criteria” in Proceedings of the
fair design of the small bore pipes should avoid coincidence 1974 Purdue Compressor Technology Conf. pp.329-336
between the natural frequencies of the pipe and the harmonics
of the rotational speed of the pump. [8] Gibert, R. J. , 1988 Vibrations des structures - Interactions
avec les fluides - Sources d’excitation aléatoires ed. Eyrolles,
Paris
[9] Landau, L. and Lifchitz, E. 1974 Mécanique ed. Mir
CONCLUSIONS [10] Karczub, D.G.. and Norton, M. P. 1999 “Correlations
A root velocity criterion has been proposed for the between dynamic stress and velocity in randomly excited
evaluation of the risk of vibration-induced fatigue of small bore beams”, Journal of Sound and Vibration 226(4) pp.645-674
pipes on industrial piping systems. It has the following
[11] Au-Yang M. K., 2001 Flow-Induced Vibration of Power
advantages:
and Process Plant Components - A Practical Workbook ,
• the location of the measurement is well-
ASME Press , New York
defined,
• information about a possible coincidence with [12] Ibrahim, A., 1985, Parametric Random Variation ,
a main pipe resonance is provided. Research Studies Press - Wiley and Sons
The criterion appears less conservative than the 12 mm/s [13] Sobczyk, B. and Spencer, F. Jr., 1992 , Random Fatigue -
rule of thumb and more conservative than the ANSI-OM3 From Data to Theory , Academic Press
criteria. It is validated by comparisons with former analysis.
[14] Roark, R.J, 1965 Formulas for stresses and strains
McGraw-Hill
[15] Blevins, R. D. , 1984 Formulas for natural frequency and
ACKNOWLEDGMENTS mode shape , Robert E. Krieger Publishing Company
Special thanks are due to MM. Paulhiac and Guillou for
fruitful discussions and field data.
APPENDIX : APPROXIMATE MODE SHAPE OF A
SMALL BORE PIPE
REFERENCES
[1] Moussou, P. and Boyelle, H. 1999 “Analysis of the General expression of a deflection shape
vibrations of a complete French PWR power plant piping We consider a straight pipe of length L described by the
system” ASME PVP Conf. 389 Flow-Induced Vibration theory of Euler-Bernoulli beams [14]. For a given pulsation ω,
pp. 415-422 the deflection shape spectrum is a combination of harmonic and
exponential terms :
[2] Moussou, P., Cambier, S. , Lachene D. , Longarini S. ,
Paulhiac, L. and Villouvier, V., 2001 “Vibration investigation y(x) = A cos(kx) + B sin(kx) + C exp(-kx) + D exp(kx)
of a French PWR power plant piping system caused by k being related to the pulsation ω by the dispersion equation :
cavitating butterfly valves” ASME-PVP Conf. 420-2 pp.99-106 EI k4 = λω²
[3] Richardon M. 1997 “Is it a mode shape or an operating λ stands for the mass per unit length of the pipe, equal to:
deflection shape ? ” Sound and vibration, 30th anniv. Issue 2
πρ steel ( Rout 2
− Rin ) + πρ water Rin2 .
January 1997 pp.54-61
The angle, bending moment and shear force spectra can be
[4] Requirements for Preoperational and Initial Start-up
deduced from the deflection shape spectrum by:
Vibration Testing of Nuclear Power Piping Systems , 1982
θ(x)/k = ∂y / ∂(kx)
ANSI-ASME OM3, ASME, NY 10017
M(x) / EIk² = ∂²y / ∂(kx)²
[5] Wachel, J. C. 1995 “Displacement method for determining -F(x) / EIk³ = ∂³y / ∂(kx)³
acceptable piping vibration amplitudes” Int. ASME PVP Conf.
- Codes and Standards, Vol. 2 : current perspectives 319-2
pp.197-208
9 Copyright © 2002 by ASME
Downloaded From: https://proceedings.asmedigitalcollection.asme.org on 05/06/2019 Terms of Use: http://www.asme.org/about-asme/terms-of-use
Mode shape approximation Justification of the removal of the exp(kx) term
In this chapter, we assume the term exp(kx) to be negligible The underlying idea is that if the term exp(kx) had a
and we derive an expression of the mode shape of the small noticeable influence on the left side of the straight pipe, it
bore pipe. The justification of the removal of exp(kx) is given would dominate the deflection , the angle, the moment and the
afterwards. shear force on the right side. As a mode shape of the type
A straightforward calculation shows that the mode shape of y ~ exp(kx) does not seem physically acceptable, the term
a straight pipe clamped on its left side and without any exp(kx) exp(kx) should be negligible in most practical case.
term depends on one coefficient C : The approximate mode shape is compared with several
y(x) = C[exp(-kx) - cos(kx) + sin(kx)] mode shapes given by Blevins [15] in the figures 14 to 16. A
fair agreement is obtained in all cases, so that the removal of the
The coefficient C can be expressed as a function of the exponential term is justified.
bending stress using the expression of the bending moment and sin(u) - cos(u) + exp(-u)
2
the relation: σ0 = M0 Rout / I . -sin(u) + cos(u) + exp(-u)
u²-u³/3
We thus get:
2-2u
σ0 1.5
k 2 y( x) = ( exp(− kx ) − cos( kx ) + sin( kx ))
2 Rout E
1
The k² term suggests to use the dispersion relation and to
replace the deflection spectrum y by the velocity spectrum v:
0.5
EI σ 0
v( x) = ( exp( − kx ) − cos( kx ) + sin( kx ))
λ 2 Rout E 0
0 0.2 0.4 0.6 0.8 1
This expression can be rearranged in non-dimensional form :
u
v( x) σ
= α 0 ( exp( − kx ) − cos( kx ) + sin( kx ) ) Figure 14: static deflection for a pure shear force at
csteel E u =1
sin(u) - cos(u) + exp(-u)
1 ρ steel I
where α is the following term: 2
. For steel tubes -sin(u) + cos(u) + exp(-u)
2 λRout 1st mode clamped-free shape
complying with the ASME B.3610 M-1996 standard, the term α 1st mode clamped-free bending moment
2
can be computed as a function of the outer diameter. The result
is shown in Figure 13. As can be seen, α varies from 0.2 to 0.3 1.5
in a wide range of diameters. 1
0.5
Note : the dispersion relation can be rewritten as:
0
ω
k2 = 0 0.5 1 1.5
2α csteel Rout -0.5
-1
u = 1.87510407 * x / L
0.3 Figure 15: mode shape for a clamped-free beam
1st mode clamped-pinned shape
1st mode clamped-pinned bending moment
sin(u) - cos(u) + exp(-u)
0.2 -sin(u) + cos(u) + exp(-u)
2
Alpha
Schedule 10 1.5
Schedule 40 (STD) 1
0.1
Schedule 80 (XS sauf 10") 0.5
Schedule 160 0
0 1 2 3
-0.5
0
1/8 1/4 1/2 1 1 2 3 4 6 8 10 12 -1
1/2 Nominal diameter (inches) -1.5
u = 3.92660231 * x / L
Figure 13: values of the alpha term for tubes Figure 16: mode shape for a clamped-pinned beam
complying with ASME B.3610 M-1996
10 Copyright © 2002 by ASME
Downloaded From: https://proceedings.asmedigitalcollection.asme.org on 05/06/2019 Terms of Use: http://www.asme.org/about-asme/terms-of-use
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Siemens - 7VE6xxx Catalog SIP-2008 enDocument24 pagesSiemens - 7VE6xxx Catalog SIP-2008 encalripkenNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- 26 RC CircuitDocument6 pages26 RC CircuitsamNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Exp 7Document10 pagesExp 7esumshunNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- InteliLite 9 1 6 0 Global GuideDocument416 pagesInteliLite 9 1 6 0 Global GuideFabio CapelessoNo ratings yet
- Parallel OperationDocument54 pagesParallel OperationGabriel Paco LunaNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- TUTORIAL 7 (Intro To AC)Document4 pagesTUTORIAL 7 (Intro To AC)zahirah najihahNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Astm D4602-93 PDFDocument4 pagesAstm D4602-93 PDFAnonymous rWoXWzqNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- 8 RMS PDFDocument4 pages8 RMS PDFraymund12345No ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Electrical Fundamentals ExamDocument35 pagesElectrical Fundamentals ExambipinupNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Power Quality Analysis A Distributed Measurement SystemDocument6 pagesPower Quality Analysis A Distributed Measurement SystemtamsideNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- EE 304 Measurements and Instrumentation Lecture 2 (Measurement Errors)Document14 pagesEE 304 Measurements and Instrumentation Lecture 2 (Measurement Errors)Mahmoud OmarNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Weld Checker MM-400 DesktopDocument2 pagesWeld Checker MM-400 DesktopIsaque PedroNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Generating System Test Template For Non-Synchronous GenerationDocument66 pagesGenerating System Test Template For Non-Synchronous Generationaracgx9900No ratings yet
- Brochure For CTPT AnalyzerDocument6 pagesBrochure For CTPT AnalyzerBogdan IlieNo ratings yet
- Vibration 141016223131 Conversion Gate01Document148 pagesVibration 141016223131 Conversion Gate01Idabagus Putu Putra MahartanaNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- REQUIRED REGISTER LIST - Silverhawk Generating Station (Analog Conversion)Document2 pagesREQUIRED REGISTER LIST - Silverhawk Generating Station (Analog Conversion)Cedric SINDJUINo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Up Polytechnic 2nd Semester Basic Electrical EngineeringDocument65 pagesUp Polytechnic 2nd Semester Basic Electrical EngineeringDeepak kumarNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- 00 35 (PART3) Issue3 1999Document492 pages00 35 (PART3) Issue3 1999yoosef100% (1)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- John F. Rider - Basic Electricity Vol 3Document132 pagesJohn F. Rider - Basic Electricity Vol 3sezaroNo ratings yet
- LAB 4: Three-Phase Uncontrolled Rectifier With PSIM Larning ObjectivesDocument7 pagesLAB 4: Three-Phase Uncontrolled Rectifier With PSIM Larning ObjectivesMO 'No ratings yet
- BEE Question Bank 1 PDFDocument2 pagesBEE Question Bank 1 PDFchaitanyaNo ratings yet
- Tektronix cfg250 FunctiongeneratorDocument37 pagesTektronix cfg250 FunctiongeneratorNaur AvilaNo ratings yet
- ESE Questions Bank EE NetworkDocument12 pagesESE Questions Bank EE NetworkgregNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- ADE7880 Medidor de EnergiaDocument104 pagesADE7880 Medidor de EnergiaJeziel Vazquez NavaNo ratings yet
- LR-Ship Vibration and Noise-Some Topical AspectsDocument11 pagesLR-Ship Vibration and Noise-Some Topical AspectsmariodalNo ratings yet
- ! - 1979 - Drouet, M., & Nadeau, F. - Pressure Waves Due To Arcing Faults in A SubstationDocument4 pages! - 1979 - Drouet, M., & Nadeau, F. - Pressure Waves Due To Arcing Faults in A SubstationMikeNo ratings yet
- Internship Report: Zain UL Islam SiddiquiDocument22 pagesInternship Report: Zain UL Islam SiddiquiZain SiddiquiNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Lab 1-1Document5 pagesLab 1-1Hifzhan RjNo ratings yet
- Iso 20816 8 2018Document13 pagesIso 20816 8 2018aravind.reliabilityNo ratings yet
- Fluke 2007Document103 pagesFluke 2007colemanu100% (2)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)