You might also like
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- PDE - S and Transition Density FunctionDocument44 pagesPDE - S and Transition Density FunctionParitoshNo ratings yet
- 06 Subgradients ScribedDocument5 pages06 Subgradients ScribedFaragNo ratings yet
- B For I 1,, M: N J J JDocument19 pagesB For I 1,, M: N J J Jضيٍَِِ الكُمرNo ratings yet
- Graphs of Functions ExplainedDocument10 pagesGraphs of Functions ExplainedHaoyu WangNo ratings yet
- Levenberg Marquardt AlgorithmDocument5 pagesLevenberg Marquardt AlgorithmNithin Mohan100% (5)
- Calculus Overview: 0.1 Limits and ContinuityDocument14 pagesCalculus Overview: 0.1 Limits and Continuitytanmoy bhattacharjeeNo ratings yet
- 1B Methods Lecture Notes: Richard Jozsa, DAMTP Cambridge Rj310@cam - Ac.ukDocument36 pages1B Methods Lecture Notes: Richard Jozsa, DAMTP Cambridge Rj310@cam - Ac.ukRomain LiNo ratings yet
- Module 1 Introduction to Limits and DerivativesDocument10 pagesModule 1 Introduction to Limits and DerivativesErn NievaNo ratings yet
- EE364b Homework SolutionsDocument5 pagesEE364b Homework SolutionsShy PeachD100% (1)
- Winitzki - No Distributional Limit For Delta Function of Complex ArgumentsDocument2 pagesWinitzki - No Distributional Limit For Delta Function of Complex ArgumentswinitzkiNo ratings yet
- Definition: A Vector-Argument, Real Valued Function G (X) Is Strictly Convex IffDocument2 pagesDefinition: A Vector-Argument, Real Valued Function G (X) Is Strictly Convex IffnakinhoNo ratings yet
- Modified Section 01Document7 pagesModified Section 01Eric ShiNo ratings yet
- Chapter 2, Lecture 3: Building Convex FunctionsDocument4 pagesChapter 2, Lecture 3: Building Convex FunctionsCơ Đinh VănNo ratings yet
- Convexity Examples: CE 377K Stephen D. Boyles Spring 2015Document11 pagesConvexity Examples: CE 377K Stephen D. Boyles Spring 2015hoalongkiemNo ratings yet
- Lecture Notes: Some Notes On Gradient Descent: Marc ToussaintDocument4 pagesLecture Notes: Some Notes On Gradient Descent: Marc Toussaintakma20No ratings yet
- Lagrange Multipliers: Solving Multivariable Optimization ProblemsDocument5 pagesLagrange Multipliers: Solving Multivariable Optimization ProblemsOctav DragoiNo ratings yet
- Calculus, Probability, and Statistics Primers: Dave GoldsmanDocument104 pagesCalculus, Probability, and Statistics Primers: Dave Goldsmanbanned minerNo ratings yet
- Quantum Field Theory Notes On The Delta Function and Related IssuesDocument3 pagesQuantum Field Theory Notes On The Delta Function and Related IssuesybNo ratings yet
- (k+1) K (K) (K) (K) : Recall That A Direction Is A Vector of Unit LengthDocument5 pages(k+1) K (K) (K) (K) : Recall That A Direction Is A Vector of Unit LengthHilal Akmal AdiputraNo ratings yet
- Connexions Module: m11240Document4 pagesConnexions Module: m11240rajeshagri100% (2)
- Calculus To First ExamDocument9 pagesCalculus To First ExamSteven WalkerNo ratings yet
- EE364b Homework 2 Optimality Conditions and Coordinate Descent for L1 Regularized MinimizationDocument5 pagesEE364b Homework 2 Optimality Conditions and Coordinate Descent for L1 Regularized MinimizationtechutechuNo ratings yet
- Optimization-Based Control: Richard M. Murray Control and Dynamical Systems California Institute of TechnologyDocument21 pagesOptimization-Based Control: Richard M. Murray Control and Dynamical Systems California Institute of TechnologyBang JulNo ratings yet
- LP1 Math1 Unit-2 Edited-083121Document13 pagesLP1 Math1 Unit-2 Edited-083121hajiNo ratings yet
- Advanced Gradient DescentDocument14 pagesAdvanced Gradient DescentMontassar MhamdiNo ratings yet
- The Gamma FunctionDocument20 pagesThe Gamma FunctionHenry Pomares CanchanoNo ratings yet
- Constrained OptimizationDocument10 pagesConstrained OptimizationCourtney WilliamsNo ratings yet
- Notes For Limits and Continuity'Document5 pagesNotes For Limits and Continuity'Plămădeală MaxNo ratings yet
- ORF 523 Lecture on Convex FunctionsDocument14 pagesORF 523 Lecture on Convex FunctionsLuis Carlos RojanoNo ratings yet
- Gammafunction PDFDocument20 pagesGammafunction PDFTeferiNo ratings yet
- UGCM1653 - Chapter 2 Calculus - 202001 PDFDocument30 pagesUGCM1653 - Chapter 2 Calculus - 202001 PDF木辛耳总No ratings yet
- Clase AvanzadaDocument6 pagesClase AvanzadallruNo ratings yet
- Continuous on an IntervalDocument9 pagesContinuous on an IntervalMarc Jason LanzarroteNo ratings yet
- LAS in Basic Calculus Week 1 8 v2 1Document68 pagesLAS in Basic Calculus Week 1 8 v2 1Marione LontokNo ratings yet
- Lec3 Convex Function ExerciseDocument4 pagesLec3 Convex Function Exercisezxm1485No ratings yet
- Optimization: 1 MotivationDocument20 pagesOptimization: 1 MotivationSCRBDusernmNo ratings yet
- Lecture - 10 Monotone Comparative StaticsDocument20 pagesLecture - 10 Monotone Comparative StaticsAhmed GoudaNo ratings yet
- Differentiability for Multivariable Functions ExplainedDocument7 pagesDifferentiability for Multivariable Functions ExplainedPranabKumarGoswamiNo ratings yet
- Lagrange Multipliers: D D N×D N 1Document3 pagesLagrange Multipliers: D D N×D N 1vip_thb_2007No ratings yet
- 23 Lect DualAlgoDocument51 pages23 Lect DualAlgozhongyu xiaNo ratings yet
- 11 Limits of Functions of Real Variables: 11.1 The ε / δ DefinitionDocument7 pages11 Limits of Functions of Real Variables: 11.1 The ε / δ Definitiona2hasijaNo ratings yet
- Review of Basic Calculus ConceptsDocument15 pagesReview of Basic Calculus ConceptsSitra AbduNo ratings yet
- Calculus FULLDocument107 pagesCalculus FULLkanishkaNo ratings yet
- Lecture Notes On Multivariable CalculusDocument36 pagesLecture Notes On Multivariable CalculusAnwar ShahNo ratings yet
- Continuous Functions and LimitsDocument9 pagesContinuous Functions and LimitsQurban HanifNo ratings yet
- Chapter 4 NLO PDFDocument34 pagesChapter 4 NLO PDFYotamNo ratings yet
- Chapter 3 DifferentiationDocument114 pagesChapter 3 DifferentiationAhmed DammakNo ratings yet
- Ds 6Document10 pagesDs 6Giozy OradeaNo ratings yet
- L'Hopital's RuleDocument3 pagesL'Hopital's Rulesuluclac100% (1)
- Principal ValuesDocument13 pagesPrincipal ValuesAlex TanNo ratings yet
- Proximal Gradient Descent: (And Acceleration)Document33 pagesProximal Gradient Descent: (And Acceleration)Saheli ChakrabortyNo ratings yet
- Improper IntegralDocument23 pagesImproper IntegralPblock Saher100% (1)
- Lecture 07 Differentiable FunctionsDocument8 pagesLecture 07 Differentiable FunctionsThomas HavierNo ratings yet
- Practice Problems Set 2Document5 pagesPractice Problems Set 2kahmad6266No ratings yet
- UntitledDocument5 pagesUntitledEzekiel PeterNo ratings yet
- OQM Lecture Note - Part 8 Unconstrained Nonlinear OptimisationDocument23 pagesOQM Lecture Note - Part 8 Unconstrained Nonlinear OptimisationdanNo ratings yet
- 3 - FOURIER ANALYSIS - S-Fall23-24Document41 pages3 - FOURIER ANALYSIS - S-Fall23-24Wasib SakibNo ratings yet
- Chapter 2Document95 pagesChapter 2smixers gtNo ratings yet
- DC Programming Optimization MethodDocument13 pagesDC Programming Optimization Methodamisha2562585No ratings yet
- 6.5620 (6.875), Fall 2022: TemplateDocument4 pages6.5620 (6.875), Fall 2022: TemplateWenjun HouNo ratings yet
- Quiz 2 Study GuideDocument1 pageQuiz 2 Study GuideWenjun HouNo ratings yet
- Design and Analysis of AlgorithmsDocument15 pagesDesign and Analysis of AlgorithmsWenjun HouNo ratings yet
- Profile of The Jesuit Graduate at Graduation:: Age Quod AgisDocument1 pageProfile of The Jesuit Graduate at Graduation:: Age Quod AgisWenjun HouNo ratings yet
- William Tempest's Chronology of The WorldDocument93 pagesWilliam Tempest's Chronology of The WorldWenjun HouNo ratings yet
- ALX AICE - Milestone #3 RubricDocument3 pagesALX AICE - Milestone #3 RubricAnita BoboNo ratings yet
- Order Processing System ThesisDocument6 pagesOrder Processing System Thesiskvpyqegld100% (1)
- Extra Credit Film Review Assignment.Document2 pagesExtra Credit Film Review Assignment.Lily HenNo ratings yet
- 06 Rāga1Document14 pages06 Rāga1veena murthyNo ratings yet
- Lyapunov Stability Criteria Nonlinear SystemsDocument21 pagesLyapunov Stability Criteria Nonlinear Systems黃元貞No ratings yet
- One Way Trip To The CCNA Routing & Switching CertificationDocument575 pagesOne Way Trip To The CCNA Routing & Switching CertificationJohnNo ratings yet
- 12th INFORMATIC PRACTICES SET 1Document5 pages12th INFORMATIC PRACTICES SET 1ushavalsaNo ratings yet
- Real Time Transport ProtocolDocument2 pagesReal Time Transport ProtocolDinesh KumarNo ratings yet
- Prayer Update Apr June 2023 1Document24 pagesPrayer Update Apr June 2023 1sunil CNo ratings yet
- PX408: Relativistic Quantum Mechanics: Tim Gershon (T.J.Gershon@warwick - Ac.uk)Document11 pagesPX408: Relativistic Quantum Mechanics: Tim Gershon (T.J.Gershon@warwick - Ac.uk)Blebbing BillNo ratings yet
- Difference Between Epic and Moc EpicDocument3 pagesDifference Between Epic and Moc EpicChairNo ratings yet
- Stop and Frisk Genre AnalysisDocument6 pagesStop and Frisk Genre Analysisapi-356866705No ratings yet
- Truth or Tradition?Document1 pageTruth or Tradition?A. HeraldNo ratings yet
- Weak and Strong Convergence To Fixed Points of Asymptotically Nonexpansive MappingsDocument7 pagesWeak and Strong Convergence To Fixed Points of Asymptotically Nonexpansive MappingsIrfana AshrafNo ratings yet
- Challenges SupragsegmentalDocument22 pagesChallenges SupragsegmentalraulNo ratings yet
- MGMT 540 2019 February - A Cross Cultural Crash and Labor Conflict - Sai Nong Restaurant (A)Document8 pagesMGMT 540 2019 February - A Cross Cultural Crash and Labor Conflict - Sai Nong Restaurant (A)Komal KapilNo ratings yet
- Games World of Puzzles April 2017Document84 pagesGames World of Puzzles April 2017mina_ql100% (1)
- Study & Design of Micro-Strip Patch Antenna: Presented By:-Dhanush Savaram (20H51A04F8)Document29 pagesStudy & Design of Micro-Strip Patch Antenna: Presented By:-Dhanush Savaram (20H51A04F8)Dhanush SavaramNo ratings yet
- GUIA TUTORIAL DE Ingles 2020Document70 pagesGUIA TUTORIAL DE Ingles 2020nuro2010No ratings yet
- Cornflour Bomb Demonstration - Literacy ActivityDocument3 pagesCornflour Bomb Demonstration - Literacy ActivityZac McGillNo ratings yet
- Task 1, Unit 1Document3 pagesTask 1, Unit 1Andrés BuchelliiNo ratings yet
- Modul - Bahasa Inggris - 01 - 3.1 - XDocument5 pagesModul - Bahasa Inggris - 01 - 3.1 - XFifi AfifahNo ratings yet
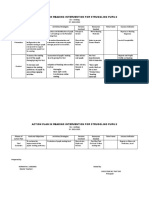
- Action Plan in Reading Intervention For Struggling PupilsDocument2 pagesAction Plan in Reading Intervention For Struggling PupilsJollibee McDonaldsNo ratings yet
- Connect.: Unit 3 TestDocument2 pagesConnect.: Unit 3 TestJaerdes LimaNo ratings yet
- Week 4 - New KTG DLLDocument5 pagesWeek 4 - New KTG DLLCesar VidadNo ratings yet
- Tibetan MedicineDocument5 pagesTibetan Medicinehannahji0% (1)
- Stylistic Analysis of McGough's "40-LoveDocument3 pagesStylistic Analysis of McGough's "40-LoveVanina Oroz De GaetanoNo ratings yet
- Gsd-CodesDocument12 pagesGsd-CodesPriya Ghosh100% (2)
- Philosophy and Revolution, Four Lectures PDFDocument6 pagesPhilosophy and Revolution, Four Lectures PDFGeorgy PlekhanovNo ratings yet
- GST 212 - Philosophy and LogicDocument27 pagesGST 212 - Philosophy and LogicekeoyindoNo ratings yet