You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- M - SC - Physics - 345 11 - Classical MechanicsDocument290 pagesM - SC - Physics - 345 11 - Classical MechanicsMubashar100% (1)
- A Course of Theoretical Physics Volume 1 Fundamental Laws Mechanics Electrodynamics Quantum Mechanics-A.S. Kompaneyets PDFDocument574 pagesA Course of Theoretical Physics Volume 1 Fundamental Laws Mechanics Electrodynamics Quantum Mechanics-A.S. Kompaneyets PDFRoberto Pomares100% (1)
- Basdevant JL Variational Principles in PhysicsDocument247 pagesBasdevant JL Variational Principles in PhysicsStrahinja Donic100% (2)
- Podkletnov 2001 Paper With Giovanni ModaneseDocument39 pagesPodkletnov 2001 Paper With Giovanni ModaneseNullpunktsenergieNo ratings yet
- Classical and Quantum DynamicsDocument458 pagesClassical and Quantum Dynamicskratik100% (3)
- General Relativity Based of Action and Differential FormsDocument86 pagesGeneral Relativity Based of Action and Differential FormsKeshav PrasadNo ratings yet
- The Cosmological Constant, The Fate of The Universe, Unimodular Gravity, and All ThatDocument19 pagesThe Cosmological Constant, The Fate of The Universe, Unimodular Gravity, and All ThatAndres AvilaNo ratings yet
- 1Document1 page1Priyam MehtaNo ratings yet
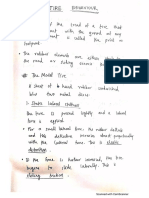
- Tire BehaviorDocument13 pagesTire BehaviorPriyam MehtaNo ratings yet
- Finalyearreport15 16Document166 pagesFinalyearreport15 16Priyam MehtaNo ratings yet
- Tyre As Car ComponentDocument113 pagesTyre As Car ComponenttsegayNo ratings yet
- Grbook PDFDocument997 pagesGrbook PDFAleksandërNo ratings yet
- 2011-ELF EarthquakesDocument18 pages2011-ELF EarthquakesFer TenerifeNo ratings yet
- Simulate Power Plant Superheater in SimulinkDocument4 pagesSimulate Power Plant Superheater in SimulinkHendra Sutan Intan MarajoNo ratings yet
- chp2 PDFDocument40 pageschp2 PDFplfratarNo ratings yet
- Lagrangian Mechanics NotesDocument94 pagesLagrangian Mechanics NotesFatima Om SalmanNo ratings yet
- Quantum Field Theory: Roberto CasalbuoniDocument205 pagesQuantum Field Theory: Roberto CasalbuoniunwantedNo ratings yet
- Chen 2008 - Quantum Field Theory and Differential GeometryDocument28 pagesChen 2008 - Quantum Field Theory and Differential GeometryflausenNo ratings yet
- Hamiltonian ChaosDocument17 pagesHamiltonian ChaosMainak ChatterjeeNo ratings yet
- Oxford Quantum Theory Lecture NotesDocument92 pagesOxford Quantum Theory Lecture Notest ElderNo ratings yet
- Eur. J. Phys. 32 (2011) 63 - Schrodinger EquationDocument26 pagesEur. J. Phys. 32 (2011) 63 - Schrodinger EquationJung Teag KimNo ratings yet
- Lanczos's Functional Theory of ElectrodyamicsDocument18 pagesLanczos's Functional Theory of ElectrodyamicsportosinNo ratings yet
- H301 PresentationDocument21 pagesH301 PresentationA.R.Bathri NarayananNo ratings yet
- Hamiltonian Function Explained in 40 CharactersDocument19 pagesHamiltonian Function Explained in 40 CharactersGAURAV PANDEYNo ratings yet
- Lagrangian Quantum Field Theory 2.1 General Formalism: A (X) or The Index CanDocument26 pagesLagrangian Quantum Field Theory 2.1 General Formalism: A (X) or The Index CanJisoo Eric LeeNo ratings yet
- Quantum Cosmology and Baby Universes TQW - DarksidergDocument365 pagesQuantum Cosmology and Baby Universes TQW - DarksidergGhufranAhmedHashmi100% (2)
- Lanczos Theory ElectrodynamicsDocument18 pagesLanczos Theory ElectrodynamicsportosinNo ratings yet
- University TechnologyDocument16 pagesUniversity TechnologyAleksandarBukvaNo ratings yet
- Physics of non-inertial reference framesDocument8 pagesPhysics of non-inertial reference framesNʌlʌyʌk LʌðkʌNo ratings yet
- Lesson 9: Einstein Field Equations: Notes From Prof. Susskind Video Lectures Publicly Available On YoutubeDocument45 pagesLesson 9: Einstein Field Equations: Notes From Prof. Susskind Video Lectures Publicly Available On YoutubeOpulentNo ratings yet
- Noether's Theorem, Rotating Potentials, and Jacobi's Integral of MotionDocument8 pagesNoether's Theorem, Rotating Potentials, and Jacobi's Integral of MotionEleni MitsiNo ratings yet
- QFT Notes: Sarthak DuaryDocument7 pagesQFT Notes: Sarthak DuarySarthakNo ratings yet
- M.SC Phy, I Yr, P-II Clas MechDocument172 pagesM.SC Phy, I Yr, P-II Clas MechAMIT VAIDNo ratings yet
- Kinetic Theory of Self-Gravitating Systems: James BinneyDocument23 pagesKinetic Theory of Self-Gravitating Systems: James Binneynom nomNo ratings yet