You might also like
- PCK 304 Assessment and Output 3.1 (Lyka)Document2 pagesPCK 304 Assessment and Output 3.1 (Lyka)Lyka Ladon100% (1)
- 22POP13Document6 pages22POP13The Golden Hacker'sNo ratings yet
- 22POP13-VTU-C ProgrammingDocument6 pages22POP13-VTU-C ProgrammingSunitha PNo ratings yet
- Elec/Tele/Phtn 4123 Electrical/Telecommunications Design ProficiencyDocument5 pagesElec/Tele/Phtn 4123 Electrical/Telecommunications Design Proficiencyvince kafuaNo ratings yet
- 22POP13Document6 pages22POP13Puneeth GjNo ratings yet
- CSIT1114 - Lab2 - 1230 - Ms. Sara Majed - 8192959Document7 pagesCSIT1114 - Lab2 - 1230 - Ms. Sara Majed - 8192959adam hopeNo ratings yet
- Lab Exercise Test First Using Junit: 1 PracticesDocument8 pagesLab Exercise Test First Using Junit: 1 PracticesStanley UmohNo ratings yet
- OOPs Lab ManualDocument88 pagesOOPs Lab ManualHariVignesh14No ratings yet
- Project Title: Group Members Names SchoolDocument5 pagesProject Title: Group Members Names Schoolapi-396388164No ratings yet
- Semestre 2Document132 pagesSemestre 2Marta MoratillaNo ratings yet
- What Is Engineering ProcessDocument4 pagesWhat Is Engineering Processex4182No ratings yet
- Programming Fundamental: Sobia IftikharDocument40 pagesProgramming Fundamental: Sobia IftikharK213604 Muhammad Arham MahmoodNo ratings yet
- Workshop 3Document6 pagesWorkshop 3yunpeng wangNo ratings yet
- Worksheet 2.12 TDD Test-Driven DevelopmentDocument9 pagesWorksheet 2.12 TDD Test-Driven DevelopmentLorena FajardoNo ratings yet
- ENEL3CC Phase 2 RequirementsDocument4 pagesENEL3CC Phase 2 RequirementsNOMPUMELELO MTHETHWANo ratings yet
- CSC101 - ICT - Lab Manual Sp22 - v3.1Document138 pagesCSC101 - ICT - Lab Manual Sp22 - v3.1Muhammad IsmailNo ratings yet
- Basics of OPNET IT Guru Academic Edition: ObjectivesDocument4 pagesBasics of OPNET IT Guru Academic Edition: Objectiveszerihun demereNo ratings yet
- Assessment Test - Software DevelopmentDocument4 pagesAssessment Test - Software DevelopmentharrisonchumpitazNo ratings yet
- Assignment (Assessment 3) (40%) : DetailsDocument4 pagesAssignment (Assessment 3) (40%) : Detailsvl coderNo ratings yet
- LAB 1 - Problem Solving Through Algorithm and FlowchartDocument3 pagesLAB 1 - Problem Solving Through Algorithm and FlowchartJong Suk LeeNo ratings yet
- ST Lab ManualDocument30 pagesST Lab ManualYashraj MohrirNo ratings yet
- Introduction To Software Engineering: Engr. Hafiza Sundus WaleedDocument21 pagesIntroduction To Software Engineering: Engr. Hafiza Sundus WaleedMuhammad AliNo ratings yet
- Best Practices CCNADocument36 pagesBest Practices CCNAOrlando PereiraNo ratings yet
- Test-Driven Java Development - Sample ChapterDocument35 pagesTest-Driven Java Development - Sample ChapterPackt PublishingNo ratings yet
- VBDocument281 pagesVBNatnael HmNo ratings yet
- 22ESC145 (C Programming)Document5 pages22ESC145 (C Programming)Prasanna M KNo ratings yet
- ID2203 Project PDFDocument4 pagesID2203 Project PDFИван КозловNo ratings yet
- Coursework Brief-1Document3 pagesCoursework Brief-1Tumuhimbise MosesNo ratings yet
- Task 3 - Instructions SheetDocument4 pagesTask 3 - Instructions SheetaaaNo ratings yet
- Develop CBT, ENDocument2 pagesDevelop CBT, ENTuấn NguyễnNo ratings yet
- CP1404 - Assignment 2 - Movies To Watch 2.0 (Part 1 ONLY) : TaskDocument5 pagesCP1404 - Assignment 2 - Movies To Watch 2.0 (Part 1 ONLY) : TaskJACK LuckyNo ratings yet
- End of Course Memo CS 101 - Intro To Computing Aaron Bloomfield (Fall 2005)Document4 pagesEnd of Course Memo CS 101 - Intro To Computing Aaron Bloomfield (Fall 2005)Mohammad Sa-ad L IndarNo ratings yet
- CSC101 - ICT - Lab 1Document42 pagesCSC101 - ICT - Lab 1iKonikNo ratings yet
- Test Before You CodeDocument10 pagesTest Before You CodeAndrew DzyniaNo ratings yet
- Object Oriented Analysis and Design: Using Unified Modeling Language (UML)Document24 pagesObject Oriented Analysis and Design: Using Unified Modeling Language (UML)Ali SherNo ratings yet
- Testing and QA On Development Stack With Agile MethodologiesDocument7 pagesTesting and QA On Development Stack With Agile MethodologiesNguyen Thai BinhNo ratings yet
- Semestre 3Document138 pagesSemestre 3Marta MoratillaNo ratings yet
- Assessment Details 2023 2024Document5 pagesAssessment Details 2023 2024ismaeellatif30No ratings yet
- ENEL641 W2016 ProjectDocument8 pagesENEL641 W2016 ProjectKaran AroraNo ratings yet
- Introduction To C ProgrammingDocument5 pagesIntroduction To C ProgrammingAnraxNo ratings yet
- Weeks 6 and 8 Worksheetv1Document3 pagesWeeks 6 and 8 Worksheetv1MarkNo ratings yet
- Selenium Interview QuestionsDocument93 pagesSelenium Interview QuestionsAlimjan AblaNo ratings yet
- Learning Episode 6Document5 pagesLearning Episode 6Danica Ellaiza C. EnditaNo ratings yet
- STE - Computer-Programming-Q4-MODULE 1-2Document17 pagesSTE - Computer-Programming-Q4-MODULE 1-2Rosarie CharishNo ratings yet
- OOPs Lab ManualDocument88 pagesOOPs Lab Manualkingraaja0% (1)
- Workbook Practical Experimental Skills 20-21 V3Document225 pagesWorkbook Practical Experimental Skills 20-21 V3LauraNo ratings yet
- CIS034-1 Assignment BriefDocument6 pagesCIS034-1 Assignment Briefmailsender787No ratings yet
- EE-123 OOP Spring 2017 Lect 1-4Document17 pagesEE-123 OOP Spring 2017 Lect 1-4Taha TariqNo ratings yet
- Technical-Vocational-Livelihood Computer Systems Servicing NC Ii Quarter 3 - Module 3Document13 pagesTechnical-Vocational-Livelihood Computer Systems Servicing NC Ii Quarter 3 - Module 3Avigail Valeza-PadillaNo ratings yet
- L01 - IntroductionDocument51 pagesL01 - IntroductionBigu Marius AlinNo ratings yet
- Following Is The Strategy We Used in One of My Projects:: Define Brain Stromming and Cause Effect Graphing? With Eg?Document10 pagesFollowing Is The Strategy We Used in One of My Projects:: Define Brain Stromming and Cause Effect Graphing? With Eg?murtajiz110No ratings yet
- LO 1. Plan and Prepare For Task To Be UndertakenDocument5 pagesLO 1. Plan and Prepare For Task To Be UndertakenJerry G. Gabac100% (1)
- BUS308 Analysis Assignment by TessaDocument10 pagesBUS308 Analysis Assignment by TessaduccutehandsomeNo ratings yet
- Wednesday, January 27 in Class IndividualDocument8 pagesWednesday, January 27 in Class Individualsowmiyaraj88No ratings yet
- Outside in React Development SampleDocument63 pagesOutside in React Development SampleMuhammad ShariqNo ratings yet
- 2023 Assignment2 SIT744Document6 pages2023 Assignment2 SIT744ankitmehta.au23No ratings yet
- Software DevelopmentDocument73 pagesSoftware Developmentamanj8668No ratings yet
- Course Outline Cse110 - MHTDocument3 pagesCourse Outline Cse110 - MHTShoeb Islam HamimNo ratings yet
- Development and Experimental Evaluation of Machine Learning Techniques For An Intelligent Hairy Scalp Detection SystemDocument29 pagesDevelopment and Experimental Evaluation of Machine Learning Techniques For An Intelligent Hairy Scalp Detection SystemBilly GeneNo ratings yet
- G53PEC-Exam and Answers (Sample)Document5 pagesG53PEC-Exam and Answers (Sample)Billy GeneNo ratings yet
- The University of Nottingham: Malaysia CampusDocument5 pagesThe University of Nottingham: Malaysia CampusBilly GeneNo ratings yet
- Deontology and UtilitarianismDocument45 pagesDeontology and UtilitarianismBilly GeneNo ratings yet
- Isruc SleepDocument14 pagesIsruc SleepBilly GeneNo ratings yet
- Bad Smells Checklist:Version ControlDocument1 pageBad Smells Checklist:Version ControlBilly GeneNo ratings yet
- Finzar Free Pack: Download LinkDocument1 pageFinzar Free Pack: Download LinkBilly GeneNo ratings yet
- Algorithms and Correctness Past PaperDocument7 pagesAlgorithms and Correctness Past PaperBilly GeneNo ratings yet
- Ali Abdaal's Video EditingDocument1 pageAli Abdaal's Video EditingBilly GeneNo ratings yet
- Thepowerofmusicinthelivesofolderadults Creechetal 2013Document34 pagesThepowerofmusicinthelivesofolderadults Creechetal 2013Billy GeneNo ratings yet
- Thepowerofmusicinthelivesofolderadults Creechetal 2013Document34 pagesThepowerofmusicinthelivesofolderadults Creechetal 2013Billy GeneNo ratings yet
- Video LinkDocument1 pageVideo LinkBilly GeneNo ratings yet
- Headgain 110 Steps of Communication OutlineDocument12 pagesHeadgain 110 Steps of Communication OutlinePratush Rajpurohit0% (2)
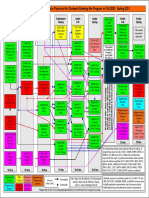
- Mechanicalengineering Sequence Chartfor Fall 2020 To Spring 2021Document1 pageMechanicalengineering Sequence Chartfor Fall 2020 To Spring 2021RonaldNo ratings yet
- Distribution of Cards: (Parent'S Record)Document3 pagesDistribution of Cards: (Parent'S Record)CRIZALYN BILLONESNo ratings yet
- Chapter - 1: 1 - P A G e Measuring Patient Satisfaction Service of JRRMCHDocument39 pagesChapter - 1: 1 - P A G e Measuring Patient Satisfaction Service of JRRMCHMd Khaled NoorNo ratings yet
- THM03 Syllabus (Micro Perspective of Tourism and Hospitality)Document24 pagesTHM03 Syllabus (Micro Perspective of Tourism and Hospitality)kathmb7380No ratings yet
- Unit 7 - Skills Inventory ActivityDocument11 pagesUnit 7 - Skills Inventory ActivitySAI NARASIMHULUNo ratings yet
- Rubrics For Assessment (10-11-17)Document40 pagesRubrics For Assessment (10-11-17)Missia H. SabtalNo ratings yet
- CSE103 Mini Project Specification Spring2023Document4 pagesCSE103 Mini Project Specification Spring2023BeingsentiNo ratings yet
- Post Event Report WritingDocument6 pagesPost Event Report WritingMansi PatelNo ratings yet
- Rotary-Endodontics - Dental Ebook & Lecture Notes PDF Download (Studynama - Com - India's Biggest Website For BDS Study Material Downloads)Document84 pagesRotary-Endodontics - Dental Ebook & Lecture Notes PDF Download (Studynama - Com - India's Biggest Website For BDS Study Material Downloads)Vinnie Singh0% (1)
- Đề Tiên Tri Chữa Live 3Document6 pagesĐề Tiên Tri Chữa Live 3爱笑笑小丫头No ratings yet
- GED DiplomaDocument3 pagesGED Diplomapatcharawadee RojcharoenchaiNo ratings yet
- Unit 21 Authorised Assignment Brief For Learning Aim A and B Medical Physics Application Version 1 October 2016Document3 pagesUnit 21 Authorised Assignment Brief For Learning Aim A and B Medical Physics Application Version 1 October 2016isha yousafNo ratings yet
- Every Mind Matters Body Image in A Digital World KS34Document9 pagesEvery Mind Matters Body Image in A Digital World KS34Jay SiiNo ratings yet
- Euripides' Medea: Greek Text With Facing Vocabulary and CommentaryDocument148 pagesEuripides' Medea: Greek Text With Facing Vocabulary and CommentaryMarkusRadmayrNo ratings yet
- The Child and Adolescent Learners and Learning PrinciplesDocument1 pageThe Child and Adolescent Learners and Learning PrinciplesFelicen JunaNo ratings yet
- Experience Human Development 12th Edition Papalia Test BankDocument25 pagesExperience Human Development 12th Edition Papalia Test BankPamelaRiosnfyq100% (62)
- Lesson 1Document4 pagesLesson 1api-241112979No ratings yet
- H6Eh-Iiifg-6: Instructional PlanningDocument6 pagesH6Eh-Iiifg-6: Instructional PlanningAileen DesamparadoNo ratings yet
- Obstetrica Ginecologie Sem IDocument4 pagesObstetrica Ginecologie Sem Icristiana pNo ratings yet
- 5S of HousekeepingDocument27 pages5S of HousekeepingBerlin AlcaydeNo ratings yet
- MO1007 Course Guide (2011)Document19 pagesMO1007 Course Guide (2011)mintc2No ratings yet
- Methodology - Unit 2Document17 pagesMethodology - Unit 2Arunkumar RavikumarNo ratings yet
- Guest Lectures Report WritingDocument8 pagesGuest Lectures Report WritingOm LahareNo ratings yet
- NB Guidelines and Standards-Educational Planning For Students With ExceptionalitiesDocument34 pagesNB Guidelines and Standards-Educational Planning For Students With Exceptionalitiesapi-249986210No ratings yet
- DT English JHS Grde 7 - Unit 10Document3 pagesDT English JHS Grde 7 - Unit 10lillian GhaderianNo ratings yet
- CURRICULUM VITAE - Uttam ThapaDocument4 pagesCURRICULUM VITAE - Uttam ThapaRajamanickam SubramanianNo ratings yet
- Product Goal ExamplesDocument6 pagesProduct Goal Examplesbernardo95No ratings yet
- Unit 10: Our Houses in The Future Lesson 3: A Closer Look 2: - LanguageDocument6 pagesUnit 10: Our Houses in The Future Lesson 3: A Closer Look 2: - LanguageĐức ViệtNo ratings yet
- Job AnalysisDocument25 pagesJob AnalysisAmaya AmarasingheNo ratings yet