You might also like
- Information of QSRC Hubs AssemblingDocument11 pagesInformation of QSRC Hubs AssemblingRicardo ScaleNo ratings yet
- Part List: TS-RF3 Three Speed HubDocument1 pagePart List: TS-RF3 Three Speed HubRicardo ScaleNo ratings yet
- Alma M50 Eagle.: Especificaciones Y Opciones GeometríaDocument1 pageAlma M50 Eagle.: Especificaciones Y Opciones GeometríaRicardo ScaleNo ratings yet
- Elisa-3 - Rahal TechnologyDocument24 pagesElisa-3 - Rahal TechnologyRicardo ScaleNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Intel E3825 SBC (ITX-F-3825)Document3 pagesIntel E3825 SBC (ITX-F-3825)Nenad HutinskiNo ratings yet
- M BusDocument88 pagesM Busakshay_haridasNo ratings yet
- Alfamax NurseCall EnglishDocument4 pagesAlfamax NurseCall EnglishYacine MesnataNo ratings yet
- TRIAC Relay Contact Protection PDFDocument1 pageTRIAC Relay Contact Protection PDFefremofeNo ratings yet
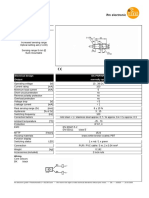
- DC PNP/NPN Electrical Design Normally Open Output: WiringDocument1 pageDC PNP/NPN Electrical Design Normally Open Output: WiringOSAMANo ratings yet
- 9.1.3 Packet Tracer - Identify MAC and IP AddressesDocument3 pages9.1.3 Packet Tracer - Identify MAC and IP Addresseskds20850No ratings yet
- Bingol Et Al2019 - A LoRa-based Smart Streetlighting System For Smart CitiesDocument5 pagesBingol Et Al2019 - A LoRa-based Smart Streetlighting System For Smart CitiesShadowMageNo ratings yet
- Corocam 6Hd: High Performance Daylight Corona Imaging CameraDocument5 pagesCorocam 6Hd: High Performance Daylight Corona Imaging CamerajimNo ratings yet
- Power Waves and The Scattering Matrix: V%+ Z%ibDocument9 pagesPower Waves and The Scattering Matrix: V%+ Z%ibsanjeevsoni64No ratings yet
- Gek 106864Document4 pagesGek 106864zakaria nouiNo ratings yet
- Otomasi Dengan PLCDocument56 pagesOtomasi Dengan PLCrm_maryunNo ratings yet
- Partially Graded Vs Fully GradedDocument6 pagesPartially Graded Vs Fully GradedAbdulyunus AmirNo ratings yet
- Smart Security System For Vehicles Using Internet of Things (Iot)Document6 pagesSmart Security System For Vehicles Using Internet of Things (Iot)Brightworld ProjectsNo ratings yet
- PHILIPS Laser MFDDocument86 pagesPHILIPS Laser MFDbladimir77No ratings yet
- Different Modulation Techniques PDFDocument5 pagesDifferent Modulation Techniques PDFnaseer m a abdul khadarNo ratings yet
- 3D Solar Cell Technology IeDocument12 pages3D Solar Cell Technology IeYachika YadavNo ratings yet
- Six Functions Serial Module USB TTL 232 485 User ManualDocument6 pagesSix Functions Serial Module USB TTL 232 485 User ManualElecmasterNo ratings yet
- PC Control Command Reference For The Ts-480Hx/ Sat TransceiverDocument26 pagesPC Control Command Reference For The Ts-480Hx/ Sat Transceiversdelpi5146No ratings yet
- Ee3 Mosfet ReviewDocument58 pagesEe3 Mosfet ReviewkaaashuNo ratings yet
- RF ConceptsDocument109 pagesRF ConceptssrinidhiNo ratings yet
- CMOS VLSI Design 92Document1 pageCMOS VLSI Design 92Carlos SaavedraNo ratings yet
- IOT Project POSTERDocument1 pageIOT Project POSTERFemilNo ratings yet
- HBD 9500Document40 pagesHBD 9500Gil SantosNo ratings yet
- RGB Control SwitchDocument1 pageRGB Control SwitchLucian LupaşcoNo ratings yet
- 9 - SINCRO - 7a - EN - WIRING DIAGRAMSDocument17 pages9 - SINCRO - 7a - EN - WIRING DIAGRAMSBoldsaikhan Tavkhai100% (1)
- Metal Fire Alarm Station Ms-700U Series: FeaturesDocument2 pagesMetal Fire Alarm Station Ms-700U Series: FeaturesRicardo TitoNo ratings yet
- Samsung NP300E5A PDFDocument55 pagesSamsung NP300E5A PDFLuiz LandtechNo ratings yet
- Power Operational Amplifier: PA01 - PA73Document5 pagesPower Operational Amplifier: PA01 - PA73khawar mukhtarNo ratings yet
- PH-ADI AV Rev1Document21 pagesPH-ADI AV Rev1alquin mabutasNo ratings yet
- EE4504 - Week 12Document11 pagesEE4504 - Week 12Daniel ChaiNo ratings yet