You might also like
- Ijaret: International Journal of Advanced Research in Engineering and Technology (Ijaret)Document9 pagesIjaret: International Journal of Advanced Research in Engineering and Technology (Ijaret)IAEME PublicationNo ratings yet
- Recent Advances in Computer Vision Applications Using Parallel ProcessingDocument126 pagesRecent Advances in Computer Vision Applications Using Parallel ProcessingMohamed EssamNo ratings yet
- Research Platform (Harp) Exploring Opencl On A Cpu-Fpga Heterogeneous ArchitectureDocument104 pagesResearch Platform (Harp) Exploring Opencl On A Cpu-Fpga Heterogeneous ArchitectureKholoud Al-AjlouniNo ratings yet
- VTK SMPDocument20 pagesVTK SMPDon PatroxNo ratings yet
- Hyper Threading Technology in MicroprocessorsDocument3 pagesHyper Threading Technology in MicroprocessorsPunya NayakNo ratings yet
- Programming Massively Parallel Processors: A Hands-on ApproachFrom EverandProgramming Massively Parallel Processors: A Hands-on ApproachNo ratings yet
- Neurocomp2010 0034Document7 pagesNeurocomp2010 0034Phuong anNo ratings yet
- Programming in OpenCL and Its Advantages in A GPU FrameworkDocument7 pagesProgramming in OpenCL and Its Advantages in A GPU FrameworkIJRASETPublicationsNo ratings yet
- 2ObsPy - What Can It Do For Data Centers and ObservatoriesDocument12 pages2ObsPy - What Can It Do For Data Centers and ObservatoriesMacarena CárcamoNo ratings yet
- Comparing ICP Variants On Real-World Data Sets: Autonomous Robots April 2013Document18 pagesComparing ICP Variants On Real-World Data Sets: Autonomous Robots April 2013Євген ВознюкNo ratings yet
- A Survey of Parallel Programming Models and Tools in The Multi and Many-Core EraDocument18 pagesA Survey of Parallel Programming Models and Tools in The Multi and Many-Core Eraramon91No ratings yet
- SuperDocument7 pagesSuperalexbob45No ratings yet
- A Comparative Study of Scheduling Algori PDFDocument7 pagesA Comparative Study of Scheduling Algori PDFPramit NeupaneNo ratings yet
- QoS-enabled ANFIS Dead Reckoning Algorithm For DisDocument11 pagesQoS-enabled ANFIS Dead Reckoning Algorithm For DisacevalloNo ratings yet
- A High Availability Solution For GRID ServicesDocument16 pagesA High Availability Solution For GRID ServicesMohamed SAADAOUINo ratings yet
- A Survey of Performance Modeling and Simulation Techniques For Accelerator-Based ComputingDocument10 pagesA Survey of Performance Modeling and Simulation Techniques For Accelerator-Based ComputingMiguel Ramírez CarrilloNo ratings yet
- Multimodal, Stochastic Symmetries For E-Commerce: Elliot Gnatcher, PH.D Diana Gracey, PH.DDocument7 pagesMultimodal, Stochastic Symmetries For E-Commerce: Elliot Gnatcher, PH.D Diana Gracey, PH.Dmohammed alhamdiNo ratings yet
- Decoupling Flip-Flop Gates From Rpcs in 802.11B: Ahmad Zahedi, Abdolazim Mollaee and Behrouz JamaliDocument6 pagesDecoupling Flip-Flop Gates From Rpcs in 802.11B: Ahmad Zahedi, Abdolazim Mollaee and Behrouz Jamalipayam12No ratings yet
- Design and Implementation of A Parallel Priority Queue On Many-Core ArchitecturesDocument10 pagesDesign and Implementation of A Parallel Priority Queue On Many-Core Architecturesfonseca_rNo ratings yet
- SCSI Disks UsingDocument13 pagesSCSI Disks UsingAmit RoyNo ratings yet
- Benchmarking State-of-the-Art Deep Learning Software ToolsDocument6 pagesBenchmarking State-of-the-Art Deep Learning Software ToolsLuis Dominguez LeitonNo ratings yet
- Rubio Campillo2018Document3 pagesRubio Campillo2018AimanNo ratings yet
- An Efficient Sorting Algorithm With CUDADocument8 pagesAn Efficient Sorting Algorithm With CUDA87zeroNo ratings yet
- Performance Evaluation of Random ForestDocument6 pagesPerformance Evaluation of Random ForestFauzi Adi RafrastaraNo ratings yet
- Application of FPGA to Real‐Time Machine Learning: Hardware Reservoir Computers and Software Image ProcessingFrom EverandApplication of FPGA to Real‐Time Machine Learning: Hardware Reservoir Computers and Software Image ProcessingNo ratings yet
- Multimodal, Stochastic Symmetries For E-Commerce: Elliot Gnatcher, PH.D., Associate Professor of Computer ScienceDocument8 pagesMultimodal, Stochastic Symmetries For E-Commerce: Elliot Gnatcher, PH.D., Associate Professor of Computer Sciencemaldito92No ratings yet
- Cufft Performance GraphsDocument10 pagesCufft Performance Graphsapi-12797690No ratings yet
- Multicore PDFDocument5 pagesMulticore PDFSujatha KotaNo ratings yet
- To HPC With MPI For Data Science: Frank NielsenDocument304 pagesTo HPC With MPI For Data Science: Frank NielsenِAhmed Jebur AliNo ratings yet
- We Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsDocument41 pagesWe Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsPavankumar PkNo ratings yet
- AOS - Theory - Multi-Processor & Distributed UNIX Operating Systems - IDocument13 pagesAOS - Theory - Multi-Processor & Distributed UNIX Operating Systems - ISujith Ur FrndNo ratings yet
- Choosing The Best Embedded Processing Platform For On-Board UAV Image ProcessingDocument11 pagesChoosing The Best Embedded Processing Platform For On-Board UAV Image ProcessingImzara AmeaNo ratings yet
- WRF Performance OptimizationaDocument8 pagesWRF Performance OptimizationayesuNo ratings yet
- A Unified HW/SW Interface Refinement Approach For Mpsoc DesignDocument6 pagesA Unified HW/SW Interface Refinement Approach For Mpsoc DesignSOUKAINA GHAZALINo ratings yet
- "Studies On Implementation and Enhancement of Computational Speed of Computer "Using New Binary Number System"Document9 pages"Studies On Implementation and Enhancement of Computational Speed of Computer "Using New Binary Number System"reeta1981No ratings yet
- Flora: Deployment of Hierarchical DatabasesDocument6 pagesFlora: Deployment of Hierarchical DatabasesDaim ShamsuddinNo ratings yet
- Pid 411805Document9 pagesPid 411805shadigamalhassanNo ratings yet
- 4-Bit Processing Unit Design Usingvhdl Structural Modeling For Multiprocessor ArchitectureDocument6 pages4-Bit Processing Unit Design Usingvhdl Structural Modeling For Multiprocessor ArchitectureArpan AdakNo ratings yet
- CPU-Assisted GPGPU On Fused CPU-GPU ArchitecturesDocument12 pagesCPU-Assisted GPGPU On Fused CPU-GPU ArchitectureshiraNo ratings yet
- A Cost-Effective Strategy For Intermediate Data Storage in Scientific Cloud Workflow SystemsDocument12 pagesA Cost-Effective Strategy For Intermediate Data Storage in Scientific Cloud Workflow SystemsLeon Yang LiNo ratings yet
- LLNL Introduction To Parallel ComputingDocument39 pagesLLNL Introduction To Parallel ComputingLogeswari GovindarajuNo ratings yet
- FULLTEXT01Document18 pagesFULLTEXT01Dejan VujičićNo ratings yet
- Inference Hardware Review by MicrosoftDocument17 pagesInference Hardware Review by MicrosoftRonald dNo ratings yet
- SPPU High Performance ComputingDocument12 pagesSPPU High Performance ComputingGovind RajputNo ratings yet
- Command Concurrrency OPENclDocument20 pagesCommand Concurrrency OPENclsughra afzaliNo ratings yet
- I-Core: A Run-Time Adaptive Processor For Embedded Multi-Core SystemsDocument8 pagesI-Core: A Run-Time Adaptive Processor For Embedded Multi-Core Systemsinr0000zhaNo ratings yet
- Computer PerformanceDocument36 pagesComputer PerformancemotazNo ratings yet
- UpdatedbibliographyDocument5 pagesUpdatedbibliographyapi-298940823No ratings yet
- Parallelization and PerformanceDocument8 pagesParallelization and PerformanceGabriel DonovanNo ratings yet
- We Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsDocument15 pagesWe Are Intechopen, The World'S Leading Publisher of Open Access Books Built by Scientists, For ScientistsPramod Reddy RNo ratings yet
- Formas de Usar VinaDocument13 pagesFormas de Usar VinaLaura GarciaNo ratings yet
- Scimakelatex 16710 Talon Julio AnciraDocument5 pagesScimakelatex 16710 Talon Julio AnciraLKNo ratings yet
- PUNK Visualization of Object-Oriented LanguagesDocument4 pagesPUNK Visualization of Object-Oriented LanguagesJ Christian OdehnalNo ratings yet
- Scimakelatex 23005 Stripe CheetosDocument6 pagesScimakelatex 23005 Stripe CheetosOne TWoNo ratings yet
- A Performance Analysis For Microprocessor ArchitecDocument6 pagesA Performance Analysis For Microprocessor ArchiteckalyanNo ratings yet
- Modeling and Simulation of Thermal Power Plants with ThermoSysPro: A Theoretical Introduction and a Practical GuideFrom EverandModeling and Simulation of Thermal Power Plants with ThermoSysPro: A Theoretical Introduction and a Practical GuideNo ratings yet
- Efficient ROS-Compliant CPU-iGPUDocument19 pagesEfficient ROS-Compliant CPU-iGPUGary Ryan DonovanNo ratings yet
- Internal Photos 683373Document10 pagesInternal Photos 683373Farid AhmadNo ratings yet
- US Army - Operator's Manual Launching Station M901 Guided Missile Semitrailer Mounted, Patriot Air Defense Guided Missile System - TM 9-1440-600-10-US Army (1983)Document102 pagesUS Army - Operator's Manual Launching Station M901 Guided Missile Semitrailer Mounted, Patriot Air Defense Guided Missile System - TM 9-1440-600-10-US Army (1983)Farid AhmadNo ratings yet
- Data SheetDocument3 pagesData SheetFarid AhmadNo ratings yet
- Bernard Rimland - Dyslogic Syndrome_ Why Millions of Kids are 'Hyper', Attention-Disordered, Learning Disabled, Depressed, Aggressive, Defiant, or Violent--and What We Can Do About It-Jessica KingsleyDocument196 pagesBernard Rimland - Dyslogic Syndrome_ Why Millions of Kids are 'Hyper', Attention-Disordered, Learning Disabled, Depressed, Aggressive, Defiant, or Violent--and What We Can Do About It-Jessica KingsleyFarid AhmadNo ratings yet
- Ryan Williams - The Influencer Economy - How To Launch Your Idea, Share It With The World, and Thrive in The Digital Age-Ryno Lab (2016)Document245 pagesRyan Williams - The Influencer Economy - How To Launch Your Idea, Share It With The World, and Thrive in The Digital Age-Ryno Lab (2016)Farid AhmadNo ratings yet
- Artificial Swarm Intelligence Springer Nature 2019 Author ProofDocument18 pagesArtificial Swarm Intelligence Springer Nature 2019 Author ProofFarid AhmadNo ratings yet
- Aiaa DL McclintonDocument56 pagesAiaa DL McclintonFarid AhmadNo ratings yet
- California To Issue Registered Warrants - Implications For Financial Institutions and The State's CreditorsDocument5 pagesCalifornia To Issue Registered Warrants - Implications For Financial Institutions and The State's CreditorsFarid AhmadNo ratings yet
- Galaxy Sound & Communications Embraces The Future of Pristine Audio, With Purchase of 40 Powersoft K Series AmplifiersDocument3 pagesGalaxy Sound & Communications Embraces The Future of Pristine Audio, With Purchase of 40 Powersoft K Series AmplifiersFarid AhmadNo ratings yet
- SRM6100 Manual Addendum Instructions For PLC Rack Mount ModemDocument1 pageSRM6100 Manual Addendum Instructions For PLC Rack Mount ModemFarid AhmadNo ratings yet
- SRM6100-SLC Manual Addendum Instructions For Allen-Bradley SLC Chassis Mount Serial Radio ModemDocument1 pageSRM6100-SLC Manual Addendum Instructions For Allen-Bradley SLC Chassis Mount Serial Radio ModemFarid AhmadNo ratings yet
- SRM6310E-QTM Manual Addendum Instructions For Modicon Quantum Form Factor Ethernet Radio ModemDocument1 pageSRM6310E-QTM Manual Addendum Instructions For Modicon Quantum Form Factor Ethernet Radio ModemFarid AhmadNo ratings yet
- SRM6000 Manual Addendum Instructions For PLC Rack Mount ModemDocument1 pageSRM6000 Manual Addendum Instructions For PLC Rack Mount ModemFarid AhmadNo ratings yet
- 0900766b81607bbf PDFDocument2 pages0900766b81607bbf PDFFarid AhmadNo ratings yet
- SRM6000-SLC Manual Addendum Instructions For Allen-Bradley SLC Chassis Mount Serial Radio ModemDocument1 pageSRM6000-SLC Manual Addendum Instructions For Allen-Bradley SLC Chassis Mount Serial Radio ModemFarid AhmadNo ratings yet
- Marx's Objections To Credit Theories of Money: Chapter ZDocument17 pagesMarx's Objections To Credit Theories of Money: Chapter ZFarid AhmadNo ratings yet
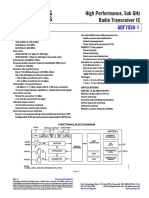
- Adf7030 1 PDFDocument55 pagesAdf7030 1 PDFFarid AhmadNo ratings yet
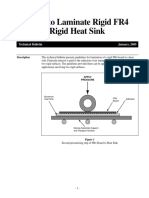
- A Guide To Laminate Rigid FR4 Board To Rigid Heat Sink: Technical Bulletin January, 2005Document3 pagesA Guide To Laminate Rigid FR4 Board To Rigid Heat Sink: Technical Bulletin January, 2005Farid AhmadNo ratings yet
- The Following Is A Schedule of Upcoming Special Issues and SectionsDocument1 pageThe Following Is A Schedule of Upcoming Special Issues and SectionsFarid AhmadNo ratings yet
- High-Level Tool Targeted For AVR Controllers: by Henrik Leerberg, IAR SystemsDocument2 pagesHigh-Level Tool Targeted For AVR Controllers: by Henrik Leerberg, IAR SystemsFarid AhmadNo ratings yet
- Pen TingDocument2 pagesPen TingFarid AhmadNo ratings yet
- Next-Generation IDE: Maximizing IP Reuse: Atmel White PaperDocument16 pagesNext-Generation IDE: Maximizing IP Reuse: Atmel White PaperFarid AhmadNo ratings yet
- Cse Vi Computer Graphics and Visualization 10cs65 NotesDocument97 pagesCse Vi Computer Graphics and Visualization 10cs65 NotesDiv Dutta100% (2)
- 2D ViewingDocument18 pages2D ViewingKishan DhageNo ratings yet
- 3DS Hardware InventoryDocument27 pages3DS Hardware InventoryMeeNo ratings yet
- O2 Tech ReportDocument63 pagesO2 Tech ReportcrapahuteurNo ratings yet
- Ee267 Notes TrackingDocument17 pagesEe267 Notes Trackingفاعل خيرNo ratings yet
- Accelerate Video Decoding With Generic GPUDocument9 pagesAccelerate Video Decoding With Generic GPUDishant AilawadiNo ratings yet
- (LU) Deep Learning Augmented Realistic Avatars For Social VR Human RepresentationDocument8 pages(LU) Deep Learning Augmented Realistic Avatars For Social VR Human RepresentationmonacothelegendNo ratings yet
- Creating and Recording Command Lists and BundlesDocument4 pagesCreating and Recording Command Lists and BundlesGabriel Nunes da SilvaNo ratings yet
- OpenGLTutorial (In QT)Document47 pagesOpenGLTutorial (In QT)Mohammad Mohsen AmiriNo ratings yet
- Road To BorutoDocument4 pagesRoad To BorutoYbruzia RuziaNo ratings yet
- University of Mumbai: Syllabus For Semv&Vi Program: Bachelor of Science Course: Computer ScienceDocument43 pagesUniversity of Mumbai: Syllabus For Semv&Vi Program: Bachelor of Science Course: Computer SciencemujaheedNo ratings yet
- Introduction To The Universal Render Pipeline For Advanced Unity Creators 2024Document140 pagesIntroduction To The Universal Render Pipeline For Advanced Unity Creators 2024nahhhfelixNo ratings yet
- OPENGL - IntroDocument21 pagesOPENGL - IntroNivedita kNo ratings yet
- CAD GTU Study Material E-Notes Unit-4 08052021103022AMDocument20 pagesCAD GTU Study Material E-Notes Unit-4 08052021103022AMvivek panchalNo ratings yet
- Chapter 4 ViewingDocument32 pagesChapter 4 ViewingKay KhineNo ratings yet
- s16 KeDocument99 pagess16 KeLiliana QueiroloNo ratings yet
- Computer Graphics CS 6THDocument3 pagesComputer Graphics CS 6THOmar FarooqNo ratings yet
- Computer Science-Syllabus (CBCS) - 18-19Document26 pagesComputer Science-Syllabus (CBCS) - 18-19Manyata ManaswiniNo ratings yet
- HolistikDocument56 pagesHolistikNuraliyah billyNo ratings yet
- Unit 1 PDFDocument109 pagesUnit 1 PDFrajath bhatNo ratings yet
- Computer Graphic Cat 2Document3 pagesComputer Graphic Cat 2Kimani MikeNo ratings yet
- Animation Field Guide v1.1 FinalDocument120 pagesAnimation Field Guide v1.1 FinalMohammed Basil100% (2)
- GP Series Chapter 19Document139 pagesGP Series Chapter 19silly_rabbitzNo ratings yet
- Dutton Marcus F 201105 PHD PDFDocument230 pagesDutton Marcus F 201105 PHD PDFBharat NarumanchiNo ratings yet
- CGV CompleteDocument44 pagesCGV CompleteSyed ShahrukhNo ratings yet
- Vulkan Tutorial PDFDocument293 pagesVulkan Tutorial PDFStefan CipriNo ratings yet
- CadDocument4 pagesCadpvrbalaNo ratings yet
- Graphical Interfaces For C#Document11 pagesGraphical Interfaces For C#Tomislav ObodjanNo ratings yet
- Real-Time Volume RenderingDocument63 pagesReal-Time Volume RenderingOlaru Vrajeala Penala Catalin-MihailNo ratings yet
- 1RN19CS410 Rashmi (CGV Project Report)Document33 pages1RN19CS410 Rashmi (CGV Project Report)RASHMI100% (3)