You might also like
- An Iot-Based Task Scheduling Optimization Scheme Considering The Deadline and Cost-Aware Scientific Workflow For Cloud ComputingDocument19 pagesAn Iot-Based Task Scheduling Optimization Scheme Considering The Deadline and Cost-Aware Scientific Workflow For Cloud ComputingAbdullah saiedNo ratings yet
- A Review On Energy Efficient Approaches For Cloud ComputingDocument12 pagesA Review On Energy Efficient Approaches For Cloud ComputingInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- JPDC Fog ComputingDocument39 pagesJPDC Fog Computingsiddhi ChaudhariNo ratings yet
- Paper 5Document11 pagesPaper 5Academic HubNo ratings yet
- Applications of Digital TwinDocument34 pagesApplications of Digital TwinParsaNo ratings yet
- Sciencedirect: Manufacturing System On The Cloud: A Case Study On Cloud-Based Process PlanningDocument7 pagesSciencedirect: Manufacturing System On The Cloud: A Case Study On Cloud-Based Process PlanningsadiksnmNo ratings yet
- A Digital Twin-Based Flexible Cellular Manufacturing For Optimization of Air Conditioner LineDocument14 pagesA Digital Twin-Based Flexible Cellular Manufacturing For Optimization of Air Conditioner Line孫ウィーユNo ratings yet
- Mobile Cloud ComputingDocument14 pagesMobile Cloud ComputingNishant kumarNo ratings yet
- A Review On Fog Computing Technology - 1 - ConferenceDocument6 pagesA Review On Fog Computing Technology - 1 - ConferenceMuhammad Atiq Ur Rehman 22-FET/PHDEE/S19No ratings yet
- Energy Efficiency in Cloud Data Centers Using Load BalancingDocument8 pagesEnergy Efficiency in Cloud Data Centers Using Load BalancingseventhsensegroupNo ratings yet
- Efficient Fault Tolerant Cost Optimized Approach For Scientific Workflow Via Optimal Replication Technique Within Cloud Computing EcosystemDocument11 pagesEfficient Fault Tolerant Cost Optimized Approach For Scientific Workflow Via Optimal Replication Technique Within Cloud Computing EcosystemIAES IJAINo ratings yet
- A Survey On Efficient Mobile Cloud Computing Through Computational OffloadingDocument5 pagesA Survey On Efficient Mobile Cloud Computing Through Computational OffloadingInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Task Allocation Algorithm and Optimization Model On Edge CollaborationDocument16 pagesTask Allocation Algorithm and Optimization Model On Edge Collaborationmeriam jemelNo ratings yet
- RSP %Document11 pagesRSP %Venkatesh .VNo ratings yet
- Intelligent Task Processing Using Mobile Edge Computing: Processing Time OptimizationDocument10 pagesIntelligent Task Processing Using Mobile Edge Computing: Processing Time OptimizationIAES IJAINo ratings yet
- Applsci 07 00235 v2Document15 pagesApplsci 07 00235 v2ramonNo ratings yet
- Container Oriented Job Scheduling Using Linear Programming ModelDocument7 pagesContainer Oriented Job Scheduling Using Linear Programming ModelVincent XiaNo ratings yet
- IRJET-Review On Virtual Machine Resource Allocation in Cloud-Fog Computing SystemsDocument5 pagesIRJET-Review On Virtual Machine Resource Allocation in Cloud-Fog Computing SystemsAnonymous O8S6PMXlWcNo ratings yet
- A27-Article 1686731246Document12 pagesA27-Article 1686731246Safiye SencerNo ratings yet
- EE Res Slic eMBB URLLC B5GDocument12 pagesEE Res Slic eMBB URLLC B5GAhmad JaradatNo ratings yet
- CS - 4012 Lab ManualDocument25 pagesCS - 4012 Lab ManualLucky ChampNo ratings yet
- (IJCST-V8I6P5) :dr. Isabella JonesDocument6 pages(IJCST-V8I6P5) :dr. Isabella JonesEighthSenseGroupNo ratings yet
- Collaborative Task Offloading and Resource Allocation With Hybrid Energy Supply For UAV-assisted Multi-CloudsDocument13 pagesCollaborative Task Offloading and Resource Allocation With Hybrid Energy Supply For UAV-assisted Multi-CloudsNguyen Khac ChienNo ratings yet
- Exploring The Research Trend of Smart Factory With Topic ModelingDocument15 pagesExploring The Research Trend of Smart Factory With Topic ModelingFxNo ratings yet
- 10 1 1 718 8383 PDFDocument10 pages10 1 1 718 8383 PDFIbrahim KhanNo ratings yet
- Productivity ImprovemenntDocument10 pagesProductivity ImprovemenntamanNo ratings yet
- DTto CPSdubuDocument17 pagesDTto CPSdubuAdraNo ratings yet
- Eng 05 00029Document12 pagesEng 05 00029Brijesh PatelNo ratings yet
- Computers & Industrial Engineering: Ziqiu Kang, Cagatay Catal, Bedir TekinerdoganDocument11 pagesComputers & Industrial Engineering: Ziqiu Kang, Cagatay Catal, Bedir TekinerdoganSaurav KumarNo ratings yet
- Dynamic Content Enabled Microservice For Business Applications in Distributed Cloudlet Cloud NetworkDocument5 pagesDynamic Content Enabled Microservice For Business Applications in Distributed Cloudlet Cloud NetworkWARSE JournalsNo ratings yet
- Compusoft, 3 (9), 1103-1107 PDFDocument5 pagesCompusoft, 3 (9), 1103-1107 PDFIjact EditorNo ratings yet
- A Proactive Material Handling Method For CPS Enabled Shop-FloorDocument35 pagesA Proactive Material Handling Method For CPS Enabled Shop-FloorMohamad alfiNo ratings yet
- Performance Analysis and Dynamic Scaling of Queue Dependent Fog Nodes For Iot DevicesDocument14 pagesPerformance Analysis and Dynamic Scaling of Queue Dependent Fog Nodes For Iot DevicesSudhansu Shekhar PatraNo ratings yet
- Cloud Computing-The Emerging Computing Paradigm For The 21st Century and AheadDocument12 pagesCloud Computing-The Emerging Computing Paradigm For The 21st Century and AheadGovindaraamayya YeluripatiNo ratings yet
- Reconfigurable Computing: Architectures and Design MethodsDocument15 pagesReconfigurable Computing: Architectures and Design MethodsLuis Charrua FigueiredoNo ratings yet
- Cloud Computing and Application of Software ServicesDocument5 pagesCloud Computing and Application of Software ServicesVIVA-TECH IJRINo ratings yet
- Application of Cloud Computing Technology in Metal ExplorationDocument4 pagesApplication of Cloud Computing Technology in Metal ExplorationPARAM JOSHINo ratings yet
- A Container Scheduling Strategy Based On Machine Learning in Microservice ArchitectureDocument7 pagesA Container Scheduling Strategy Based On Machine Learning in Microservice Architecturegabriel.matos1201No ratings yet
- Manufacturing Resource Modeling For Cloud Manufacturing: Minghai Yuan, Kun Deng, W. A. ChaovalitwongseDocument23 pagesManufacturing Resource Modeling For Cloud Manufacturing: Minghai Yuan, Kun Deng, W. A. ChaovalitwongseAvinash KumarNo ratings yet
- A Big Data Enabled Load-Balancing Control For Smart Manufacturing of Industry 4.0Document10 pagesA Big Data Enabled Load-Balancing Control For Smart Manufacturing of Industry 4.0alexanderfortis8628No ratings yet
- Lihui Wang, Xi Vincent Wang - Cloud-Based Cyber-Physical Systems in Manufacturing-Springer International Publishing (2018)Document406 pagesLihui Wang, Xi Vincent Wang - Cloud-Based Cyber-Physical Systems in Manufacturing-Springer International Publishing (2018)John McCunnister100% (1)
- (IJCST-V8I3P11) :obada Qusai Hatem, Ahmad Saker AhmadDocument5 pages(IJCST-V8I3P11) :obada Qusai Hatem, Ahmad Saker AhmadEighthSenseGroupNo ratings yet
- Concurrency and Computation - 2020 - Rjoub - Deep and Reinforcement Learning For Automated Task Scheduling in Large ScaleDocument14 pagesConcurrency and Computation - 2020 - Rjoub - Deep and Reinforcement Learning For Automated Task Scheduling in Large ScaleAli Asghar Pourhaji KazemNo ratings yet
- Just-in-Time Code Offloading For Wearable ComputingDocument10 pagesJust-in-Time Code Offloading For Wearable Computingpraveennitian_575783No ratings yet
- An Offloading SatergiesDocument13 pagesAn Offloading SatergiesMary JamesNo ratings yet
- Development of A Remote Collaborative Forging Engineering SystemDocument9 pagesDevelopment of A Remote Collaborative Forging Engineering SystemAmir JoonNo ratings yet
- Future Generation Computer Systems: Zhikai Kuang Songtao Guo Jiadi Liu Yuanyuan YangDocument11 pagesFuture Generation Computer Systems: Zhikai Kuang Songtao Guo Jiadi Liu Yuanyuan YangFSilvaNo ratings yet
- HGWODocument14 pagesHGWOlazizi eldjouherNo ratings yet
- 2022 - Analytical Offloading Design For MEC Based IOVDocument19 pages2022 - Analytical Offloading Design For MEC Based IOVcomputerparadise1993No ratings yet
- Distributed Machine Learning For Multiuser Mobile Edge Computing SystemsDocument14 pagesDistributed Machine Learning For Multiuser Mobile Edge Computing SystemsTrong-Minh HoangNo ratings yet
- Comparison Between Security Solutions in Cloud and Grid Computing and Future in Grid ComputerDocument33 pagesComparison Between Security Solutions in Cloud and Grid Computing and Future in Grid ComputerSonu LovesforuNo ratings yet
- A High Performance MRP Part Explosion Process Using Computational Grid in A Distributed Database EnvironmentDocument6 pagesA High Performance MRP Part Explosion Process Using Computational Grid in A Distributed Database EnvironmentSmeir Hamburger RiveraNo ratings yet
- Load Balancing Algoritms in Cloud Computing Environment A ReviewDocument6 pagesLoad Balancing Algoritms in Cloud Computing Environment A ReviewEditor IJRITCCNo ratings yet
- Task Partitioning and Offloading in Iot Cloud-Edge Collaborative Computing Framework: A SurveyDocument19 pagesTask Partitioning and Offloading in Iot Cloud-Edge Collaborative Computing Framework: A SurveyMikassa AckrNo ratings yet
- Journal of Computer and System Sciences: Yongqiang Gao, Haibing Guan, Zhengwei Qi, Yang Hou, Liang LiuDocument13 pagesJournal of Computer and System Sciences: Yongqiang Gao, Haibing Guan, Zhengwei Qi, Yang Hou, Liang LiuZNo ratings yet
- SDLC On Cloud ComputingDocument9 pagesSDLC On Cloud ComputingRajat Panda100% (1)
- Big Data Processing and Analytics Platform Architecture For Process Industry FactoriesDocument15 pagesBig Data Processing and Analytics Platform Architecture For Process Industry FactoriessergioNo ratings yet
- Elvina Fatma Widiyani - 20809334061 - UTS Review JurnalDocument55 pagesElvina Fatma Widiyani - 20809334061 - UTS Review Jurnalelvina fatmaWNo ratings yet
- Exam Ccts 3Document10 pagesExam Ccts 3atik rahmanNo ratings yet
- Understanding Your DuplexerDocument12 pagesUnderstanding Your DuplexerGeorge BurtNo ratings yet
- Maxwell Transient ProblemDocument45 pagesMaxwell Transient ProblemConstantin DorinelNo ratings yet
- Powell, J. David - Workman, Michael L. - Franklin, Gene F. - Solutions Manual For Digital Control of Dynamic Systems-Addison-Wesley (1998)Document454 pagesPowell, J. David - Workman, Michael L. - Franklin, Gene F. - Solutions Manual For Digital Control of Dynamic Systems-Addison-Wesley (1998)Francisco GarciaNo ratings yet
- SMC4-4-16A16B Four-Axis Motion Controller Instruction ManualDocument14 pagesSMC4-4-16A16B Four-Axis Motion Controller Instruction ManuallucaNo ratings yet
- QueuingTheory Matlab AssignmentDocument3 pagesQueuingTheory Matlab AssignmentShyam ShankarNo ratings yet
- G5 Q4W2 DLL MATH (MELCs)Document14 pagesG5 Q4W2 DLL MATH (MELCs)Rina MagaboNo ratings yet
- ANSYS-Based Detailed Thermo-Mechanical Modeling of Complex Thermoelectric Power DesignsDocument3 pagesANSYS-Based Detailed Thermo-Mechanical Modeling of Complex Thermoelectric Power DesignsablueleafNo ratings yet
- 第七單元 細線化與骨架抽取Document13 pages第七單元 細線化與骨架抽取bqj04343No ratings yet
- Uptu B.tech 2nd Year SyllabusDocument16 pagesUptu B.tech 2nd Year SyllabusPrakash KumarNo ratings yet
- Statics 13esi Solutions-Manual Chapter 6Document152 pagesStatics 13esi Solutions-Manual Chapter 6Kavinesh AnanthanNo ratings yet
- Examination-Schedule BE-Arch-BCA-B.Sc .Env - Fall-2023 AllDocument4 pagesExamination-Schedule BE-Arch-BCA-B.Sc .Env - Fall-2023 Allsandhyakhadka909No ratings yet
- Iso 8792 1986Document9 pagesIso 8792 1986Ather SeemabNo ratings yet
- Balok 30x50 PDFDocument4 pagesBalok 30x50 PDFdethaNo ratings yet
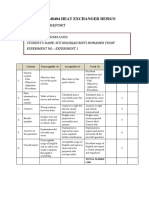
- Lab Report: SCB 48404 Heat Exchanger DesignDocument11 pagesLab Report: SCB 48404 Heat Exchanger DesignHew LetNo ratings yet
- Chemistry of Benzene: Electrophilic Aromatic SubstitutionDocument35 pagesChemistry of Benzene: Electrophilic Aromatic SubstitutionDanny Jorge Huicy FernandezNo ratings yet
- Controlling Reheat Steam Temperature in Once Through BoilersDocument8 pagesControlling Reheat Steam Temperature in Once Through Boilersபிரசன்னகுமார் ஆனந்தன்No ratings yet
- Machine Data Backup Mill16xx and Higher and Lathe 9xx and Higher - CHCDocument5 pagesMachine Data Backup Mill16xx and Higher and Lathe 9xx and Higher - CHCRenan FurlanNo ratings yet
- IC 756pro3Document118 pagesIC 756pro3larsNo ratings yet
- GeoDrive-1.0 SP4 QuickStartDocument40 pagesGeoDrive-1.0 SP4 QuickStartQuestionumber1No ratings yet
- QBXLH 6565a VTMDocument4 pagesQBXLH 6565a VTMSebastianNo ratings yet
- Introduction To Oracle SQL and PL - SyllabusDocument9 pagesIntroduction To Oracle SQL and PL - SyllabusmonikadograNo ratings yet
- PT 3rd-MathDocument13 pagesPT 3rd-MathBro MannyNo ratings yet
- GPS318 Tracker Communication Protocol V1 5Document25 pagesGPS318 Tracker Communication Protocol V1 5Yellows OchentaNo ratings yet
- (Rothe) Topic From Relativity (2010)Document107 pages(Rothe) Topic From Relativity (2010)Vbsa BsaNo ratings yet
- Weirs Notch Report PDFDocument62 pagesWeirs Notch Report PDFMaxwell RejilNo ratings yet
- DLLDocument3 pagesDLLChristopher Rous100% (1)
- Intro To Philo - Week 6 - Topic 2Document4 pagesIntro To Philo - Week 6 - Topic 2Lyen Queen N. AmpoonNo ratings yet
- Quick Response Technique For Travel Demand Estimation in SmallDocument26 pagesQuick Response Technique For Travel Demand Estimation in SmallMonalisa GadpalliwarNo ratings yet
- Immaculate Conception High School CAPE Unit 1 Module 1 Examination Pure Mathematics January 2020Document4 pagesImmaculate Conception High School CAPE Unit 1 Module 1 Examination Pure Mathematics January 2020Tavvia HenryNo ratings yet
- Generative AI: The Insights You Need from Harvard Business ReviewFrom EverandGenerative AI: The Insights You Need from Harvard Business ReviewRating: 4.5 out of 5 stars4.5/5 (3)
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveFrom EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveNo ratings yet
- Artificial Intelligence: The Insights You Need from Harvard Business ReviewFrom EverandArtificial Intelligence: The Insights You Need from Harvard Business ReviewRating: 4.5 out of 5 stars4.5/5 (104)
- HBR's 10 Must Reads on AI, Analytics, and the New Machine AgeFrom EverandHBR's 10 Must Reads on AI, Analytics, and the New Machine AgeRating: 4.5 out of 5 stars4.5/5 (69)
- Artificial Intelligence: A Guide for Thinking HumansFrom EverandArtificial Intelligence: A Guide for Thinking HumansRating: 4.5 out of 5 stars4.5/5 (30)
- T-Minus AI: Humanity's Countdown to Artificial Intelligence and the New Pursuit of Global PowerFrom EverandT-Minus AI: Humanity's Countdown to Artificial Intelligence and the New Pursuit of Global PowerRating: 4 out of 5 stars4/5 (4)
- The Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldFrom EverandThe Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldRating: 4.5 out of 5 stars4.5/5 (107)
- Scary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldFrom EverandScary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldRating: 4.5 out of 5 stars4.5/5 (55)
- Four Battlegrounds: Power in the Age of Artificial IntelligenceFrom EverandFour Battlegrounds: Power in the Age of Artificial IntelligenceRating: 5 out of 5 stars5/5 (5)
- Working with AI: Real Stories of Human-Machine Collaboration (Management on the Cutting Edge)From EverandWorking with AI: Real Stories of Human-Machine Collaboration (Management on the Cutting Edge)Rating: 5 out of 5 stars5/5 (5)
- Artificial Intelligence & Generative AI for Beginners: The Complete GuideFrom EverandArtificial Intelligence & Generative AI for Beginners: The Complete GuideRating: 5 out of 5 stars5/5 (1)
- System Design Interview: 300 Questions And Answers: Prepare And PassFrom EverandSystem Design Interview: 300 Questions And Answers: Prepare And PassNo ratings yet
- 100M Offers Made Easy: Create Your Own Irresistible Offers by Turning ChatGPT into Alex HormoziFrom Everand100M Offers Made Easy: Create Your Own Irresistible Offers by Turning ChatGPT into Alex HormoziNo ratings yet
- The Digital Mind: How Science is Redefining HumanityFrom EverandThe Digital Mind: How Science is Redefining HumanityRating: 4.5 out of 5 stars4.5/5 (2)
- Rise of Generative AI and ChatGPT: Understand how Generative AI and ChatGPT are transforming and reshaping the business world (English Edition)From EverandRise of Generative AI and ChatGPT: Understand how Generative AI and ChatGPT are transforming and reshaping the business world (English Edition)No ratings yet
- The AI Advantage: How to Put the Artificial Intelligence Revolution to WorkFrom EverandThe AI Advantage: How to Put the Artificial Intelligence Revolution to WorkRating: 4 out of 5 stars4/5 (7)
- Hands-On System Design: Learn System Design, Scaling Applications, Software Development Design Patterns with Real Use-CasesFrom EverandHands-On System Design: Learn System Design, Scaling Applications, Software Development Design Patterns with Real Use-CasesNo ratings yet
- AI and Machine Learning for Coders: A Programmer's Guide to Artificial IntelligenceFrom EverandAI and Machine Learning for Coders: A Programmer's Guide to Artificial IntelligenceRating: 4 out of 5 stars4/5 (2)
- How to Make Money Online Using ChatGPT Prompts: Secrets Revealed for Unlocking Hidden Opportunities. Earn Full-Time Income Using ChatGPT with the Untold Potential of Conversational AI.From EverandHow to Make Money Online Using ChatGPT Prompts: Secrets Revealed for Unlocking Hidden Opportunities. Earn Full-Time Income Using ChatGPT with the Untold Potential of Conversational AI.No ratings yet
- Make Money with ChatGPT: Your Guide to Making Passive Income Online with Ease using AI: AI Wealth MasteryFrom EverandMake Money with ChatGPT: Your Guide to Making Passive Income Online with Ease using AI: AI Wealth MasteryNo ratings yet
- The Roadmap to AI Mastery: A Guide to Building and Scaling ProjectsFrom EverandThe Roadmap to AI Mastery: A Guide to Building and Scaling ProjectsNo ratings yet
- Our Final Invention: Artificial Intelligence and the End of the Human EraFrom EverandOur Final Invention: Artificial Intelligence and the End of the Human EraRating: 4 out of 5 stars4/5 (82)
- ChatGPT 4 $10,000 per Month #1 Beginners Guide to Make Money Online Generated by Artificial IntelligenceFrom EverandChatGPT 4 $10,000 per Month #1 Beginners Guide to Make Money Online Generated by Artificial IntelligenceNo ratings yet
- Your AI Survival Guide: Scraped Knees, Bruised Elbows, and Lessons Learned from Real-World AI DeploymentsFrom EverandYour AI Survival Guide: Scraped Knees, Bruised Elbows, and Lessons Learned from Real-World AI DeploymentsNo ratings yet