You might also like
- MITRES 6 008S11 Lec02Document8 pagesMITRES 6 008S11 Lec02Chetan MaheshwariNo ratings yet
- Answers All 2007Document64 pagesAnswers All 2007AngieNo ratings yet
- E3.07 DSP 2000Document20 pagesE3.07 DSP 2000Mustafamna Al SalamNo ratings yet
- Radial Basis Function (RBF) Neural NetworksDocument24 pagesRadial Basis Function (RBF) Neural NetworksphatctNo ratings yet
- DSP Presentation - 3Document18 pagesDSP Presentation - 3soumikchatterjee1912No ratings yet
- Lecture 12Document33 pagesLecture 12Jaafar AbbakarNo ratings yet
- Artificial Neural Networks - : IntroductionDocument31 pagesArtificial Neural Networks - : IntroductionSridhar Koneru VenkkatNo ratings yet
- EEE312 Lab Sheet 3 Revised - SumDocument8 pagesEEE312 Lab Sheet 3 Revised - SumMasud SarkerNo ratings yet
- EP 5511 - Lecture 08Document23 pagesEP 5511 - Lecture 08Solomon Tadesse AthlawNo ratings yet
- Models of NeuronDocument9 pagesModels of NeuronTigabu YayaNo ratings yet
- 7 Structures and State-Space Realizations: 7.1 Block-Diagram RepresentationDocument21 pages7 Structures and State-Space Realizations: 7.1 Block-Diagram RepresentationCHARLES MATHEWNo ratings yet
- Chapter 2Document16 pagesChapter 2eng.rayan1996No ratings yet
- Artificial Neural Networks - : IntroductionDocument31 pagesArtificial Neural Networks - : Introductionpaku deyNo ratings yet
- Chapter-5: Proposed Split Filtering WorkDocument10 pagesChapter-5: Proposed Split Filtering WorkVijay KumarNo ratings yet
- Block Diagram Representation: Peter Avitabile Mechanical Engineering Department University of Massachusetts LowellDocument19 pagesBlock Diagram Representation: Peter Avitabile Mechanical Engineering Department University of Massachusetts LowellAnn RazonNo ratings yet
- 3 EC IES 2011 Conventional Paper IDocument6 pages3 EC IES 2011 Conventional Paper IBodhisatwa ChowdhuryNo ratings yet
- BackPropagation Through TimeDocument6 pagesBackPropagation Through Timemilan gemerskyNo ratings yet
- Ztransform AppDocument5 pagesZtransform AppSyed Ali RazaNo ratings yet
- EE4015 Homework Assignment #2Document2 pagesEE4015 Homework Assignment #2Mathematics helperNo ratings yet
- DSPDocument46 pagesDSP呂政皓No ratings yet
- NR Application To Power FlowDocument17 pagesNR Application To Power FlowSrinivas YelisettiNo ratings yet
- ECE333 Renewable Energy Systems 2015 Lect14Document43 pagesECE333 Renewable Energy Systems 2015 Lect14rdelgranadoNo ratings yet
- 2015 - Ma - Energy-Efficient Reconstruction of Compressively Sensed Bioelectrical Signals With Stochastic Computing CircuitsDocument4 pages2015 - Ma - Energy-Efficient Reconstruction of Compressively Sensed Bioelectrical Signals With Stochastic Computing CircuitsDaniel Prado de CamposNo ratings yet
- Multi-Rate Digital Signal ProcessingDocument38 pagesMulti-Rate Digital Signal Processinganon_326727214No ratings yet
- 4b StochmodelDocument14 pages4b Stochmodelzelalem hailuNo ratings yet
- The DC Power Flow EquationsDocument22 pagesThe DC Power Flow EquationsPeter JumreNo ratings yet
- NR-Power FlowDocument19 pagesNR-Power Flowandres felipe morenoNo ratings yet
- Exercises For Signals and Systems (Part Five)Document3 pagesExercises For Signals and Systems (Part Five)Vincent YuchiNo ratings yet
- HW ZTransform PDFDocument7 pagesHW ZTransform PDFLe NamNo ratings yet
- The DC Power Flow EquationsDocument25 pagesThe DC Power Flow EquationsDaryAntoNo ratings yet
- Goertzel TheoryDocument3 pagesGoertzel TheorydrashokyvuceNo ratings yet
- l7 - Learning in Multi-Layer Perceptrons, Back-PropagationDocument16 pagesl7 - Learning in Multi-Layer Perceptrons, Back-PropagationAhmad NaswinNo ratings yet
- Neural Networks BasicsDocument25 pagesNeural Networks BasicsRanit Nath100% (1)
- BMS College of Engineering, Bangalore-560019: May 2016 Semester End Main ExaminationsDocument3 pagesBMS College of Engineering, Bangalore-560019: May 2016 Semester End Main Examinationskoushik bhatNo ratings yet
- Digital Signal Processing: (Part-2)Document22 pagesDigital Signal Processing: (Part-2)meseret sisayNo ratings yet
- Assignment 1Document2 pagesAssignment 1Farhan KhalilNo ratings yet
- Https WWW - Dsprelated.com Blogimages RickLyons Sliding DFT Fast LyonsDocument10 pagesHttps WWW - Dsprelated.com Blogimages RickLyons Sliding DFT Fast LyonsMurali KrishnaNo ratings yet
- NR Application To Power FlowDocument23 pagesNR Application To Power FlowFawzi RadwanNo ratings yet
- Artificial Neural Networks - : IntroductionDocument20 pagesArtificial Neural Networks - : IntroductionSangeeta TiwariNo ratings yet
- Artificial Neural Networks - : IntroductionDocument20 pagesArtificial Neural Networks - : Introductionmvs.2016 2016No ratings yet
- EE338 Tutorial 7Document5 pagesEE338 Tutorial 7ojasvi kathuriaNo ratings yet
- Newton Raphson MethodDocument22 pagesNewton Raphson MethodSachinNo ratings yet
- Tute SignalsDocument12 pagesTute SignalsNikhil KumNo ratings yet
- Digital Signal Processing I/ 4th Class/ 2020-2021 Dr. Abbas Hussien & Dr. Ammar GhalibDocument4 pagesDigital Signal Processing I/ 4th Class/ 2020-2021 Dr. Abbas Hussien & Dr. Ammar GhalibSahdanNo ratings yet
- Smart Antenna L3 PDFDocument6 pagesSmart Antenna L3 PDFbhawnaNo ratings yet
- 5 Digital Filters: 5.1 Basic Principles and MethodsDocument27 pages5 Digital Filters: 5.1 Basic Principles and MethodsNguyễn TàiNo ratings yet
- Lab 4Document15 pagesLab 4Aliqpsk AlasadyNo ratings yet
- Exam 30 June 2015 QuestionsDocument8 pagesExam 30 June 2015 QuestionsEeers SetimNo ratings yet
- Digital Signal Processing LabDocument6 pagesDigital Signal Processing LabrahehaqguestsNo ratings yet
- FALLSEM2023-24 IMAT101P LO VL2023240106440 2023-09-20 Reference-Material-IDocument2 pagesFALLSEM2023-24 IMAT101P LO VL2023240106440 2023-09-20 Reference-Material-ISANJAY NILAVAN .S.76No ratings yet
- FALLSEM2023-24 IMAT101P LO VL2023240106440 2023-09-20 Reference-Material-IDocument2 pagesFALLSEM2023-24 IMAT101P LO VL2023240106440 2023-09-20 Reference-Material-ISANJAY NILAVAN .S.76No ratings yet
- 3 The Wiener FilterDocument15 pages3 The Wiener FilterManish VohraNo ratings yet
- Lect 8Document32 pagesLect 8Magarsa BedasaNo ratings yet
- MCE693/793: Analysis and Control of Nonlinear Systems: Introduction To Describing FunctionsDocument31 pagesMCE693/793: Analysis and Control of Nonlinear Systems: Introduction To Describing FunctionsAbdesselem BoulkrouneNo ratings yet
- VHDL LabDocument21 pagesVHDL LabDas NaikNo ratings yet
- Ch6 Presn PDFDocument24 pagesCh6 Presn PDFAlee LópezNo ratings yet
- Gauss Seidel MethodNewDocument45 pagesGauss Seidel MethodNewMehmood MalikNo ratings yet
- Artificial Neural Networks - IntroductionDocument31 pagesArtificial Neural Networks - IntroductionSofiene GuedriNo ratings yet
- Tables of Lommel's Functions of Two Pure Imaginary Variables: Mathematical Tables SeriesFrom EverandTables of Lommel's Functions of Two Pure Imaginary Variables: Mathematical Tables SeriesNo ratings yet
- Tables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27From EverandTables of the Function w (z)- e-z2 ? ex2 dx: Mathematical Tables Series, Vol. 27No ratings yet
- 336 Lecture9 2007Document4 pages336 Lecture9 2007vishal agnalNo ratings yet
- AI&Games Lecture6 Part1Document59 pagesAI&Games Lecture6 Part1vishal agnalNo ratings yet
- A Seminar Report On Google Driverless CaDocument44 pagesA Seminar Report On Google Driverless CaRathna SawkarNo ratings yet
- 6472 yKR4PJ7Document16 pages6472 yKR4PJ7vishal agnalNo ratings yet
- Google Driverless Car: Department of Electronics and Communication PDA College of Engineering, KalaburagiDocument32 pagesGoogle Driverless Car: Department of Electronics and Communication PDA College of Engineering, Kalaburagivishal agnalNo ratings yet
- YORK VRF WRC JCWA10NEGQ Installation & Maintenance Manual 2018 09Document2 pagesYORK VRF WRC JCWA10NEGQ Installation & Maintenance Manual 2018 09Orbelin Salmeron0% (1)
- Twin Rotaweigh - Rotor ScaleDocument2 pagesTwin Rotaweigh - Rotor ScaleĐi Để ĐếnNo ratings yet
- 014-226-01E - FCRGo FCR-MB101 (System) - SMDocument42 pages014-226-01E - FCRGo FCR-MB101 (System) - SMJoe B BestialNo ratings yet
- Rej603hmi Um 1mdb07206-Yn EnbDocument96 pagesRej603hmi Um 1mdb07206-Yn EnbMarian Ariciuc0% (1)
- Optimization: MVSIS V/s AIG Rewriting (ABC)Document5 pagesOptimization: MVSIS V/s AIG Rewriting (ABC)International Journal of Electrical and Electronics EngineeringNo ratings yet
- Samsung s24f352Document44 pagesSamsung s24f352KaglioNo ratings yet
- Microelectronic Circuits 8 Edition: A. Sedra, K.C. Smith T. Chan Carusone, V. GaudetDocument7 pagesMicroelectronic Circuits 8 Edition: A. Sedra, K.C. Smith T. Chan Carusone, V. GaudetBadawath NareshNo ratings yet
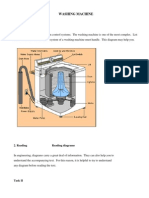
- Washing MachineDocument8 pagesWashing MachineHieu Nguyen TrungNo ratings yet
- Deisel EnginesDocument248 pagesDeisel EnginesAli Hassan100% (3)
- On The Steady-State Performance of A Synchronous Machine With Convertor: With Special Attention To Wind Energy Conversion SystemsDocument208 pagesOn The Steady-State Performance of A Synchronous Machine With Convertor: With Special Attention To Wind Energy Conversion Systemsgedeus8072No ratings yet
- Cswip Appendix 01Document23 pagesCswip Appendix 01Nsidibe Michael EtimNo ratings yet
- Ficha Técnica Batería Phoenixtec Ph12-9Document2 pagesFicha Técnica Batería Phoenixtec Ph12-9isaac.kolffNo ratings yet
- Speaking IeltsDocument6 pagesSpeaking Ieltsbalqis dindaNo ratings yet
- EST Micro-Project Shinde MamDocument14 pagesEST Micro-Project Shinde Mam974-Abhijeet MotewarNo ratings yet
- PCT200i CT PT Tester DatasheetDocument1 pagePCT200i CT PT Tester Datasheetprabhu_natarajan_nNo ratings yet
- SSP 76 SKODA GreenLine CarsDocument24 pagesSSP 76 SKODA GreenLine Carsnicolae_popescu_18No ratings yet
- MCF51QE128 SeriesDocument39 pagesMCF51QE128 SeriesEsteban HernandezNo ratings yet
- Yamaha YPT 210 ManualDocument72 pagesYamaha YPT 210 ManualTomas21oNo ratings yet
- JVC GV Chassis Av30w475 TV D PDFDocument24 pagesJVC GV Chassis Av30w475 TV D PDFRoosevelt Vega SanchezNo ratings yet
- PDFDocument292 pagesPDFHossam Mohi Eldin100% (7)
- Ford Eec Iv2168Document76 pagesFord Eec Iv2168dardo100% (2)
- Activity 5 Data and ResultDocument4 pagesActivity 5 Data and ResultJpTaladuaNo ratings yet
- Half Yearly Examination 2020 - Physics (Subjective Question Paper) XiiDocument2 pagesHalf Yearly Examination 2020 - Physics (Subjective Question Paper) XiiAlok RajNo ratings yet
- AMCI - Stepper Motor Control - Stepper Motor Drivers - SD17060E Ethernet - IP Stepper Motor Indexer - DriveDocument5 pagesAMCI - Stepper Motor Control - Stepper Motor Drivers - SD17060E Ethernet - IP Stepper Motor Indexer - DrivePedro Cu AguirreNo ratings yet
- Xprog ManualDocument32 pagesXprog Manualrevisione turbine turbo turbocompressoriNo ratings yet
- Fuse Failure RelayDocument12 pagesFuse Failure RelayHoangNo ratings yet
- International Paint - Corrossion Knowledge Sharing - RizalDocument87 pagesInternational Paint - Corrossion Knowledge Sharing - RizalMikiRoniWijaya100% (1)
- Datasheet: Trimble S3 Total StationDocument2 pagesDatasheet: Trimble S3 Total StationdjaaaamNo ratings yet
- 2017 07 22T19 35 06 - R3dlogDocument30 pages2017 07 22T19 35 06 - R3dlogRicardoNo ratings yet
- CSM 12Document16 pagesCSM 12Michel BeauregardNo ratings yet