You might also like
- 4k HQ Dorks ListDocument73 pages4k HQ Dorks ListAnibalNo ratings yet
- Control Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud) PDFDocument183 pagesControl Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud) PDFShakil Ahmed100% (1)
- Super Duty F-650 - 750 PDFDocument16 pagesSuper Duty F-650 - 750 PDFPablo Antu Manque RodriguezNo ratings yet
- English4IT - Unit 19 A Controversial IT Purchase ReadingDocument2 pagesEnglish4IT - Unit 19 A Controversial IT Purchase ReadingPurple PurpleNo ratings yet
- Tips & Techniques, UltraWAVE, Rev12Document7 pagesTips & Techniques, UltraWAVE, Rev12AntWonxxxNo ratings yet
- ELTE 305 DR Ahmed Aly Lecture1Document32 pagesELTE 305 DR Ahmed Aly Lecture1Ryiadh Al-AreibiNo ratings yet
- Lecture 01-Intro. Cont.Document20 pagesLecture 01-Intro. Cont.Reagan TorbiNo ratings yet
- (Control Engineering) : State Variables and State-Space Representation"Document13 pages(Control Engineering) : State Variables and State-Space Representation"Nasir AliNo ratings yet
- InTech-Sliding Mode Control and Fuzzy Sliding Mode Control For DC DC ConvertersDocument22 pagesInTech-Sliding Mode Control and Fuzzy Sliding Mode Control For DC DC ConvertersWalid AbidNo ratings yet
- Load Frequency Control For Multiple-Area Power Systems: Proceedings of The American Control Conference July 2009Document7 pagesLoad Frequency Control For Multiple-Area Power Systems: Proceedings of The American Control Conference July 2009KhethanNo ratings yet
- Controls Infosheet and Sample Problems 0Document11 pagesControls Infosheet and Sample Problems 0Md Nur-A-Adam DonyNo ratings yet
- Unit 2: Transfer Function: PrefaceDocument9 pagesUnit 2: Transfer Function: PrefaceNeans PlanterasNo ratings yet
- Distributed Cooperative Control For Parallel Direct Current-Direct Current Buck Converters Based On Multi-Agent Consensus TheoryDocument10 pagesDistributed Cooperative Control For Parallel Direct Current-Direct Current Buck Converters Based On Multi-Agent Consensus TheoryNawara NawaraNo ratings yet
- Ambo University: Regulation and ControlDocument20 pagesAmbo University: Regulation and ControlFikadu EshetuNo ratings yet
- Control Systems: Basil HamedDocument62 pagesControl Systems: Basil HamedHussainNo ratings yet
- InTech-Control Designs For Linear Systems Using State Derivative FeedbackDocument29 pagesInTech-Control Designs For Linear Systems Using State Derivative FeedbackManmatha KrishnanNo ratings yet
- Application of Fuzzy Logic To Control The DC-DC ConverterDocument6 pagesApplication of Fuzzy Logic To Control The DC-DC Converterankit407No ratings yet
- The Swing Up Control Problem For AcrobotDocument7 pagesThe Swing Up Control Problem For AcrobotMohit SoniNo ratings yet
- Switching Control of An R/C Hovercraft: Stabilization and Smooth SwitchingDocument11 pagesSwitching Control of An R/C Hovercraft: Stabilization and Smooth SwitchingArunavaNo ratings yet
- Research Article: Fuzzy Second-Order Sliding Mode Control Design For A Two-Cell DC-DC ConverterDocument9 pagesResearch Article: Fuzzy Second-Order Sliding Mode Control Design For A Two-Cell DC-DC ConvertersathishNo ratings yet
- EMS: Network Analysis FunctionsDocument10 pagesEMS: Network Analysis FunctionsAjit KumarNo ratings yet
- Chapter 03Document89 pagesChapter 03Şirin AdaNo ratings yet
- Automatic Control 2 NotesDocument28 pagesAutomatic Control 2 NotesÇağın OkuyucuNo ratings yet
- Chapter 2Document12 pagesChapter 2neupaneprejan2018No ratings yet
- Lab 1Document4 pagesLab 1Abdalla Fathy100% (1)
- Lab 3Document1 pageLab 3Shiyang CaiNo ratings yet
- JointActivity 2 Nov2022Document3 pagesJointActivity 2 Nov2022Smati DjamelNo ratings yet
- 1815 08 PDFDocument4 pages1815 08 PDFsiamak001No ratings yet
- Group 5.full Report Control EngineeringDocument21 pagesGroup 5.full Report Control Engineeringputri farrahNo ratings yet
- Control 2021 UngappedDocument58 pagesControl 2021 Ungapped周暐凱No ratings yet
- Chapter 2Document26 pagesChapter 2MD IMRAN HOSSENNo ratings yet
- Unidad 2 Sistema Sec Uac I OnesDocument15 pagesUnidad 2 Sistema Sec Uac I OnesRAUL OSORIO RAMOSNo ratings yet
- Lecture 02 MEE41103 Mathematical Models of Systems IDocument43 pagesLecture 02 MEE41103 Mathematical Models of Systems IMohamed HatimNo ratings yet
- Drouin 1991Document28 pagesDrouin 1991Chân ChấtNo ratings yet
- 1 From Classical Control To Fuzzy Logic ControlDocument15 pages1 From Classical Control To Fuzzy Logic Controljunior_moschen9663No ratings yet
- Moeschler Philippe - High-Level Modeling Using 20070126 PDFDocument6 pagesMoeschler Philippe - High-Level Modeling Using 20070126 PDFSrinivas CherukuNo ratings yet
- Sliding Mode Control Design Based On Ackermann's Formula PDFDocument4 pagesSliding Mode Control Design Based On Ackermann's Formula PDFChau MaiNo ratings yet
- ReportDocument23 pagesReportJagan JagaNo ratings yet
- CL7103 SystemTheoryquestionbankDocument11 pagesCL7103 SystemTheoryquestionbanksyed1188No ratings yet
- Exp01 EEE318Document7 pagesExp01 EEE318Abid AbdullahNo ratings yet
- Decentralized Robust Adaptive-Output Feedback Controller For Power System Load Frequency ControlDocument10 pagesDecentralized Robust Adaptive-Output Feedback Controller For Power System Load Frequency ControlNirav ChauhanNo ratings yet
- Hybrid Feedback Control Methods For Robust and Global Power Conversion - J. Chai and R. Sanfelice - Conference Paper (2015)Document6 pagesHybrid Feedback Control Methods For Robust and Global Power Conversion - J. Chai and R. Sanfelice - Conference Paper (2015)Aaron CrucesNo ratings yet
- Koi Sap 2009Document6 pagesKoi Sap 2009farhan beighNo ratings yet
- Control Systems and Task of Control Engineers 1.1 Introduction To Control EngineeringDocument7 pagesControl Systems and Task of Control Engineers 1.1 Introduction To Control EngineeringMagarsaa Qana'iiNo ratings yet
- Lab Manual - EEE 402 - Exp01 July2014Document7 pagesLab Manual - EEE 402 - Exp01 July2014AhammadSifatNo ratings yet
- Modeling in The Time DomainDocument19 pagesModeling in The Time DomainAnonymous 55cH67eIxNo ratings yet
- Control Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud)Document183 pagesControl Lab All Exp and Reports in Single PDF (Abdullah Ibn Mahmud)Anik PaulNo ratings yet
- Lab 6Document3 pagesLab 6Vu LeNo ratings yet
- Lec 12 - State-Space Techniques - Stability, Observability and ControllabilityDocument32 pagesLec 12 - State-Space Techniques - Stability, Observability and ControllabilityAhmet MehmetNo ratings yet
- Autotronics and Vehicle Intelligence : Aeng6205Document25 pagesAutotronics and Vehicle Intelligence : Aeng6205Abubaker MuzayinNo ratings yet
- 2012 General Hierarchical Modular Structure For Hydropower Station Auxiliary System SimulationDocument6 pages2012 General Hierarchical Modular Structure For Hydropower Station Auxiliary System SimulationJuancito ZcNo ratings yet
- Mathematical Models: Module - 2Document13 pagesMathematical Models: Module - 2Rajath UpadhyaNo ratings yet
- Control CH 1Document33 pagesControl CH 1Haile HaftuNo ratings yet
- Experiment 3Document7 pagesExperiment 3Usama NadeemNo ratings yet
- Feng Dai 1986 IEEETranAutomaticCtrlDocument4 pagesFeng Dai 1986 IEEETranAutomaticCtrlDai FengNo ratings yet
- Digital Control and State Variable AnalysisDocument16 pagesDigital Control and State Variable AnalysisAditya VasisthNo ratings yet
- CL7103-System Theory QBDocument11 pagesCL7103-System Theory QBsyed1188100% (1)
- Current Distribution Control Design For Paralleled DC/DC Converters Using Sliding-Mode ControlDocument10 pagesCurrent Distribution Control Design For Paralleled DC/DC Converters Using Sliding-Mode ControlAnushya RavikumarNo ratings yet
- A Hamiltonian Approach For The Optimal Control of The Switching Signal For A DC-DC ConverterDocument7 pagesA Hamiltonian Approach For The Optimal Control of The Switching Signal For A DC-DC ConverterSriharsha SanthapurNo ratings yet
- Robust Control Using Recursive Design Method For Flexible Joint Robot ManipulatorDocument6 pagesRobust Control Using Recursive Design Method For Flexible Joint Robot ManipulatorinfodotzNo ratings yet
- Buck BoostDocument6 pagesBuck BoostAngel MarianoNo ratings yet
- Classical Vs Intelligent ControlDocument13 pagesClassical Vs Intelligent ControlNavin DasNo ratings yet
- Discrete-Time Control System Implementation Techniques: Advances in Theory and ApplicationsFrom EverandDiscrete-Time Control System Implementation Techniques: Advances in Theory and ApplicationsNo ratings yet
- Flight Airworthiness Support Technology: J U L Y 2 0 0 4Document21 pagesFlight Airworthiness Support Technology: J U L Y 2 0 0 4Jason JiaNo ratings yet
- Spartan2 OEM I2C ManualDocument6 pagesSpartan2 OEM I2C ManualCarlos GranceNo ratings yet
- Hidden Surface, Visible Surface & Hidden-Surface Removal ProblemDocument2 pagesHidden Surface, Visible Surface & Hidden-Surface Removal ProblemManishNo ratings yet
- Unpacking of MELCS Science 7Document1 pageUnpacking of MELCS Science 7Castolo Bayucot JvjcNo ratings yet
- YZ Durasite & Spun CylinderDocument8 pagesYZ Durasite & Spun CylinderMohd RafiNo ratings yet
- Ben Haith Resume Format 5-Converted-1Document4 pagesBen Haith Resume Format 5-Converted-1Astrosavarnipal AstrosavarnipalNo ratings yet
- Project SrsDocument15 pagesProject SrsMANSI KAUSHIKNo ratings yet
- Introduction To Paid Online MarketingDocument81 pagesIntroduction To Paid Online Marketingmanishk_47No ratings yet
- Lunaire Steady State StabilityDocument2 pagesLunaire Steady State StabilityDanNo ratings yet
- Uganda Market Assessment and Case StudiesDocument59 pagesUganda Market Assessment and Case StudiesTommy MogakaNo ratings yet
- Powerpoint v4 VLCDocument107 pagesPowerpoint v4 VLCAhmed Musa AlShormanNo ratings yet
- 4.7.1 Packet Tracer - Connect The Physical Layer - ILMDocument5 pages4.7.1 Packet Tracer - Connect The Physical Layer - ILMMr CrystalNo ratings yet
- User Panel - ALLEN Career InstituteDocument5 pagesUser Panel - ALLEN Career InstituteffffffgNo ratings yet
- Final Learning Output-Learning Analytics For Classroom TeachersDocument4 pagesFinal Learning Output-Learning Analytics For Classroom TeachersJenrick F. RosarieNo ratings yet
- Vietnamese Language Recognition With SPHDocument58 pagesVietnamese Language Recognition With SPHhieuvt2008No ratings yet
- Compressor Tech June 2014 PDFDocument89 pagesCompressor Tech June 2014 PDFmfhaleem@pgesco.comNo ratings yet
- Warehouse Resume ObjectiveDocument5 pagesWarehouse Resume Objectivehjsfixljg100% (1)
- MC Formula - 2013 11Document104 pagesMC Formula - 2013 11Muhammad RidhoNo ratings yet
- 7 Standardisasi DataDocument37 pages7 Standardisasi DataRestina RitongaNo ratings yet
- Sample Seminar ReportDocument20 pagesSample Seminar Reportsatish.maliNo ratings yet
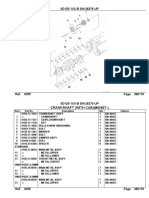
- Crankshaft With Cab 40467Document2 pagesCrankshaft With Cab 40467Shop ManualNo ratings yet
- Digital Marketing For B2B Organizations: Structured Literature Review and Future Research DirectionsDocument14 pagesDigital Marketing For B2B Organizations: Structured Literature Review and Future Research DirectionsAli HassnianNo ratings yet
- LECTURE 2 The Design Process - Sem 1 - 2022 - 2023Document35 pagesLECTURE 2 The Design Process - Sem 1 - 2022 - 2023Idham NasrulNo ratings yet
- Mini Project PPT Review-2Document46 pagesMini Project PPT Review-2198W1A05D7-SEC-C CHANDRAPATLA DEDEEPYANo ratings yet
- GiftcardMethod - September 12.1Document7 pagesGiftcardMethod - September 12.1Charlotte DörnerNo ratings yet
- DYNE - AS1675 Vs AS60044 ComparisonDocument3 pagesDYNE - AS1675 Vs AS60044 ComparisonMahfuz RahmanNo ratings yet