You might also like
- CSEC® Mathematics Past Papers (Statistics)Document10 pagesCSEC® Mathematics Past Papers (Statistics)Anthony Benson100% (1)
- 1996 AISI 09007dcc80998060Document640 pages1996 AISI 09007dcc80998060RodrigoNo ratings yet
- Tutorial KFDocument13 pagesTutorial KFkidusNo ratings yet
- Di Natale Corrado Introduction To Electronic DevicesDocument294 pagesDi Natale Corrado Introduction To Electronic DevicesStrahinja DonicNo ratings yet
- The Definite Integral and Its ApplicationsDocument13 pagesThe Definite Integral and Its Applicationsapi-312673653100% (1)
- 5compass CorrectionDocument23 pages5compass CorrectionRamanan Manimozhi100% (1)
- RCC Drain Design for Bilasipura - Guwahati Road ProjectDocument64 pagesRCC Drain Design for Bilasipura - Guwahati Road ProjectSubhajit Maitra100% (1)
- Spectral Analysis PDFDocument22 pagesSpectral Analysis PDFCesar Castillo100% (1)
- A Tutorial of The Wavelet TransformDocument72 pagesA Tutorial of The Wavelet Transformss_barpanda8473No ratings yet
- A Tutorial of The Wavelet Transform: Chun-Lin, Liu February 23, 2010Document72 pagesA Tutorial of The Wavelet Transform: Chun-Lin, Liu February 23, 2010Husam Al-AmeenNo ratings yet
- MathDocument43 pagesMathBader DahmaniNo ratings yet
- 5 On Diagonal Approximations ToDocument14 pages5 On Diagonal Approximations ToAKİF BARBAROS DİKMENNo ratings yet
- A New Filtering Approach For Continuous Time Linear Sys - 2014 - IFAC ProceedingDocument6 pagesA New Filtering Approach For Continuous Time Linear Sys - 2014 - IFAC Proceeding彭力No ratings yet
- Convergence Analysis of Extended KalmanDocument10 pagesConvergence Analysis of Extended Kalmansumathy SNo ratings yet
- 2005_12Document18 pages2005_12marian goleaNo ratings yet
- Mprovement of Extended Kalman Filter Frequency Tracker For Nonstationary Harmonic SignalsDocument6 pagesMprovement of Extended Kalman Filter Frequency Tracker For Nonstationary Harmonic SignalsFabien CallodNo ratings yet
- On Solving Periodic Riccati Equations: A. VargaDocument27 pagesOn Solving Periodic Riccati Equations: A. VargaKarad KaradiasNo ratings yet
- Detect Unbalance in Rotating Shafts Using Vibration DataDocument7 pagesDetect Unbalance in Rotating Shafts Using Vibration DataAka ShriNo ratings yet
- Lecture 5Document40 pagesLecture 5Manika SahaNo ratings yet
- Fujii 2 PDFDocument17 pagesFujii 2 PDFKidNo ratings yet
- The Spectral Gap and Rates of Convergence for Markov ChainsDocument6 pagesThe Spectral Gap and Rates of Convergence for Markov Chainssemselvan794694No ratings yet
- Notes On Spectral MethodsDocument18 pagesNotes On Spectral MethodsrosoportNo ratings yet
- On The Parameterization and Design of An Extended Kalman Filter Frequency TrackerDocument7 pagesOn The Parameterization and Design of An Extended Kalman Filter Frequency TrackerFabien CallodNo ratings yet
- On The Parameterization and Design of An Extended Kalman Filter Frequency TrackerDocument7 pagesOn The Parameterization and Design of An Extended Kalman Filter Frequency TrackerFabien CallodNo ratings yet
- Robust Principle Component Analysis (RPCA) For Seismic Data DenoisingDocument5 pagesRobust Principle Component Analysis (RPCA) For Seismic Data DenoisingSourish SarkarNo ratings yet
- EEE - 321: Signals and Systems Lab Assignment 2Document5 pagesEEE - 321: Signals and Systems Lab Assignment 2Atakan YiğitNo ratings yet
- Estimation 2 PDFDocument44 pagesEstimation 2 PDFsamina butoolNo ratings yet
- Quantum Particle Swarm Optimization For ElectromagneticsDocument27 pagesQuantum Particle Swarm Optimization For ElectromagneticsbababhoNo ratings yet
- Modern Control SensitivityDocument11 pagesModern Control SensitivityMert PotorNo ratings yet
- Advanced Quantum Mechanics, Fall 2017 Assignment 2 (Path Integrals in Quantum Mechanics)Document3 pagesAdvanced Quantum Mechanics, Fall 2017 Assignment 2 (Path Integrals in Quantum Mechanics)Anonymous tjckgoWNeNo ratings yet
- Determining of Signal Derivatives in Identification Problems - FIR Differential FiltersDocument8 pagesDetermining of Signal Derivatives in Identification Problems - FIR Differential FiltersosamaNo ratings yet
- Symmetry: Extended Convergence Analysis of The Newton-Hermitian and Skew-Hermitian Splitting MethodDocument15 pagesSymmetry: Extended Convergence Analysis of The Newton-Hermitian and Skew-Hermitian Splitting MethodAlberto Magreñán RuizNo ratings yet
- Optimal NMR pulse designDocument27 pagesOptimal NMR pulse designMax PieriniNo ratings yet
- Reconstructing Data From Alias-Free Discrete Series of Samples by Tom ChalkoDocument2 pagesReconstructing Data From Alias-Free Discrete Series of Samples by Tom ChalkoДмитрий СенюшкинNo ratings yet
- One-dimensional kinetic equations for non-Markovian processesDocument9 pagesOne-dimensional kinetic equations for non-Markovian processesCarlos CasasolaNo ratings yet
- Data Assimilation Tutorial On The Kalman Filter: A. Fowler, University of Reading Data Assimilation Research CentreDocument14 pagesData Assimilation Tutorial On The Kalman Filter: A. Fowler, University of Reading Data Assimilation Research CentreA MaqsoodNo ratings yet
- 1 s2.0 S2210983817301074 MainDocument7 pages1 s2.0 S2210983817301074 Main37 TANNUNo ratings yet
- Kalman Filter ShoudongDocument7 pagesKalman Filter Shoudongteju1996cool100% (1)
- Lest Square Spectral AnalysisDocument12 pagesLest Square Spectral AnalysisAndargie GeraworkNo ratings yet
- Sampling and Reconstruction FundamentalsDocument22 pagesSampling and Reconstruction Fundamentalsyohannes woldemichaelNo ratings yet
- 218 - EC8352, EC6303 Signals and Systems - 2 marks with answers 2Document26 pages218 - EC8352, EC6303 Signals and Systems - 2 marks with answers 2anakn803No ratings yet
- 5 Discrete Processing of Analog SignalsDocument21 pages5 Discrete Processing of Analog SignalsCHARLES MATHEWNo ratings yet
- The Fokker-Planck Equation ExplainedDocument12 pagesThe Fokker-Planck Equation ExplainedslamNo ratings yet
- Kalman Filtering For Networked Control Systems With Random Delay and Packet LossDocument17 pagesKalman Filtering For Networked Control Systems With Random Delay and Packet Lossmossammos1No ratings yet
- Solving the Wave Equation with Staggered Leapfrog MethodDocument11 pagesSolving the Wave Equation with Staggered Leapfrog MethodEfstathios SiampisNo ratings yet
- 08 Bej137Document39 pages08 Bej137christoumpingfotsoNo ratings yet
- Fast A DerDocument10 pagesFast A DervipulugaleNo ratings yet
- Inno2020 Emt4203 Control II Chap3.3-4 LQ OptimalDocument11 pagesInno2020 Emt4203 Control II Chap3.3-4 LQ Optimalkabuej3No ratings yet
- Lecture VIII: Fourier Series: Maxim RaginskyDocument20 pagesLecture VIII: Fourier Series: Maxim RaginskyShakil Safin OrthoNo ratings yet
- Solution of 2D Convection-Diffusion Transient Problems by A Fractional-Step FE MethodDocument11 pagesSolution of 2D Convection-Diffusion Transient Problems by A Fractional-Step FE MethodmazlumNo ratings yet
- EE402 Lecture 2Document10 pagesEE402 Lecture 2sdfgNo ratings yet
- Testing For Spectral Granger Causality: 15, Number 4, Pp. 1157-1166Document10 pagesTesting For Spectral Granger Causality: 15, Number 4, Pp. 1157-1166Shakti ShivaNo ratings yet
- A Differential Equation For Modeling Nesterov'sDocument18 pagesA Differential Equation For Modeling Nesterov'sRest TabernacleNo ratings yet
- On Robust Stability of Linear Neutral Systems With Time-Varying DelaysDocument15 pagesOn Robust Stability of Linear Neutral Systems With Time-Varying DelaysdabeoNo ratings yet
- ArticleDocument14 pagesArticlealipirkhedriNo ratings yet
- TrongDocument16 pagesTrongTrân TrọngNo ratings yet
- Dft:Discrete Fourier TransformDocument14 pagesDft:Discrete Fourier TransformMuhammad AlamsyahNo ratings yet
- PRL 1996Document4 pagesPRL 1996Pedro GarciaNo ratings yet
- Time-Frequency Analysis of Seismic Data Using Local AttributesDocument24 pagesTime-Frequency Analysis of Seismic Data Using Local AttributesAmitNo ratings yet
- LBSEconometricsPartIIpdf Time SeriesDocument246 pagesLBSEconometricsPartIIpdf Time SeriesZoloft Zithromax ProzacNo ratings yet
- A Simple Yet Efficient Two Step Fifth Order Weighted Newton Method For Nonlinear ModelsDocument23 pagesA Simple Yet Efficient Two Step Fifth Order Weighted Newton Method For Nonlinear ModelsAntmel Rodriguez CabralNo ratings yet
- Electronic Realization of Fractional-Order SystemsDocument7 pagesElectronic Realization of Fractional-Order SystemsVignesh RamakrishnanNo ratings yet
- Co Sa MPDocument9 pagesCo Sa MPMeral GürbüzNo ratings yet
- StehlikDocument4 pagesStehlikanistia hidayatNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- 1 4-EllipseDocument22 pages1 4-EllipseRayner RamiroNo ratings yet
- Lesson 2 - Geometric Sequence and SeriesDocument18 pagesLesson 2 - Geometric Sequence and SeriesRosalyn CalapitcheNo ratings yet
- Structure of Material ScienceDocument1 pageStructure of Material ScienceAnnas RIfaiNo ratings yet
- Easy9 MP Enclosures - EZ9E212S2SDocument2 pagesEasy9 MP Enclosures - EZ9E212S2SJamal HassaniehNo ratings yet
- Curriculum Mtech Mechanical FormatDocument64 pagesCurriculum Mtech Mechanical FormatKrishnamurthy MirajkarNo ratings yet
- EAVES APEX CONNECTION TRIALDocument15 pagesEAVES APEX CONNECTION TRIALvtalexNo ratings yet
- 4.6 Method of ImagesDocument1 page4.6 Method of Images224883061No ratings yet
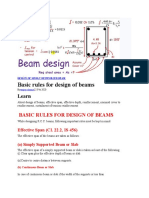
- Design of Singly Reinforced BeamDocument7 pagesDesign of Singly Reinforced BeamfelipeNo ratings yet
- CE-632 Foundation Analysis and Design: Shallow FoundationsDocument33 pagesCE-632 Foundation Analysis and Design: Shallow FoundationsMadhu SulaniyaNo ratings yet
- Applied Physics: Electric Charge Coulomb's LawDocument19 pagesApplied Physics: Electric Charge Coulomb's LawAhmadNo ratings yet
- Đề Ôn 3Document3 pagesĐề Ôn 3Linh HoàngNo ratings yet
- TestDocument9 pagesTestArgielJohn LlagasNo ratings yet
- Test Bank For College Physics 7th Edition Jerry D WilsonDocument24 pagesTest Bank For College Physics 7th Edition Jerry D WilsonlouisadonaldlwrNo ratings yet
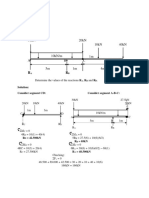
- Solutions To Continuous BeamDocument3 pagesSolutions To Continuous BeamElle HeartfiliaNo ratings yet
- Built-in Air Conditioner Saves EnergyDocument11 pagesBuilt-in Air Conditioner Saves EnergyAtchaya SivanthinathanNo ratings yet
- Design of Suspension For Formula Student Race Car - ICOVP2015 - KK21 1Document13 pagesDesign of Suspension For Formula Student Race Car - ICOVP2015 - KK21 1Rishita RajNo ratings yet
- Transient analysis of RL and RC circuitsDocument8 pagesTransient analysis of RL and RC circuitsRaskshanna100% (1)
- STP Math 2ADocument419 pagesSTP Math 2AYamin Wael ElattalNo ratings yet
- Crash GuidelinesDocument6 pagesCrash Guidelinesvivek rathodNo ratings yet
- DETERMINING CENTRE OF PRESSURE (COPDocument11 pagesDETERMINING CENTRE OF PRESSURE (COPWHfamilyNo ratings yet
- The Thermodynamics of Refrigeration - Principles of Natural Gas Cryogenic Process PDFDocument13 pagesThe Thermodynamics of Refrigeration - Principles of Natural Gas Cryogenic Process PDFRatnin PanityingNo ratings yet
- Problems 2 MukhopadhayDocument14 pagesProblems 2 MukhopadhayAnandlal RNo ratings yet
- Indian Standard: Digital Measuring Il'Lstruments ForDocument14 pagesIndian Standard: Digital Measuring Il'Lstruments ForAshish DubeyNo ratings yet
- Triple R Filter Elements: The Original and Still The Best. The Triple R 3-Stage Filtration ConceptDocument4 pagesTriple R Filter Elements: The Original and Still The Best. The Triple R 3-Stage Filtration ConceptCARLOS RAMIREZNo ratings yet