You might also like
- Construction Checklists Feb2015Document42 pagesConstruction Checklists Feb2015Edmore Mukotsanjera100% (1)
- Wheels & Tyres FinalDocument0 pagesWheels & Tyres Finalthisisjinesh0% (1)
- Site Investigation Report 1 PDFDocument21 pagesSite Investigation Report 1 PDFAsad Hafudh100% (2)
- Eddie RickenbackerDocument113 pagesEddie Rickenbackerg296469No ratings yet
- 2013 Predicting Wear and Temperature of Autonomous Haulage Truck TiresDocument6 pages2013 Predicting Wear and Temperature of Autonomous Haulage Truck Tiresjaimito13No ratings yet
- 2020 HD Sportster Service Manual 94000739Document27 pages2020 HD Sportster Service Manual 94000739DonNo ratings yet
- 2011 Dunlop Tyre GuideDocument80 pages2011 Dunlop Tyre GuideMuhammad Miftah FarisNo ratings yet
- The String Method of Wheel AlignmentDocument5 pagesThe String Method of Wheel Alignmentrb4069100% (1)
- Plastic Gears: Size WiseDocument4 pagesPlastic Gears: Size Wise28192175100% (1)
- Physical Testing of Clinker & CementDocument61 pagesPhysical Testing of Clinker & CementDineshNo ratings yet
- Driving TipsDocument20 pagesDriving TipsjsruinaNo ratings yet
- Pavement DesignDocument43 pagesPavement DesignDIDI20094No ratings yet
- VDIDocument19 pagesVDIBakkiyaraj VeluNo ratings yet
- Lpg-Tank Wagon CodeDocument30 pagesLpg-Tank Wagon Codejoefrizal100% (1)
- Cat 730Document20 pagesCat 730Tom SouzaNo ratings yet
- Major Topics On This Page: Measurement Measurement TechniquesDocument4 pagesMajor Topics On This Page: Measurement Measurement TechniquesElliot VanceNo ratings yet
- Factors Affecting The Aerodynamic Drag of Alpine Skiers: Procedia EngineeringDocument6 pagesFactors Affecting The Aerodynamic Drag of Alpine Skiers: Procedia Engineeringmatyanga samuelNo ratings yet
- MSF 618-619 591Document4 pagesMSF 618-619 591Barak VinklerNo ratings yet
- Irjet V8i8150Document6 pagesIrjet V8i8150secularguy69No ratings yet
- Simulation of Very High Snow Loads On Solar Thermal CollectorsDocument5 pagesSimulation of Very High Snow Loads On Solar Thermal Collectorsbeauty xuNo ratings yet
- 11 Material ModelingDocument16 pages11 Material ModelingradhakrishnanNo ratings yet
- Applsci 12 09646Document14 pagesApplsci 12 09646sanjayuven97No ratings yet
- Porlekar 1490193277 Volume 3 Issue 3Document8 pagesPorlekar 1490193277 Volume 3 Issue 3Sourabh PatilNo ratings yet
- Numerical and Experimental Investigation of The Design of A Piezoelectric De-Icing System For Small Rotorcraft 3Document26 pagesNumerical and Experimental Investigation of The Design of A Piezoelectric De-Icing System For Small Rotorcraft 3DebanjanNo ratings yet
- Ijirt151158 Paper PDFDocument2 pagesIjirt151158 Paper PDFNukul MahajanNo ratings yet
- Irjet V8i153Document3 pagesIrjet V8i153FAB squadNo ratings yet
- Ecg 344 Lab Skid ResDocument5 pagesEcg 344 Lab Skid Resdzakirin hannanNo ratings yet
- Wear Thermal Analysis of Disc Brake Rotor For Different Materials Ijariie6191Document8 pagesWear Thermal Analysis of Disc Brake Rotor For Different Materials Ijariie6191Rizki Eka PutraNo ratings yet
- Analiza Termica Disc FranaDocument8 pagesAnaliza Termica Disc FranaLuca VictorNo ratings yet
- Bradleya DevelopmentDocument17 pagesBradleya DevelopmentMearg NgusseNo ratings yet
- Assignments 1 and 2 - 2017 MemoDocument7 pagesAssignments 1 and 2 - 2017 Memonyashadzashe munyatiNo ratings yet
- 7.design and Analysis of Disk Brake PDFDocument9 pages7.design and Analysis of Disk Brake PDFVikas Mani TripathiNo ratings yet
- E1844Document4 pagesE1844DannyChaconNo ratings yet
- Numerical Investigation On Super-Cooled Large Droplet Icing of Fan Rotor Blade in Jet EngineDocument7 pagesNumerical Investigation On Super-Cooled Large Droplet Icing of Fan Rotor Blade in Jet EngineTudorache BogdanNo ratings yet
- Use of Smooth-Treaded Test Tire in Evaluating Skid ResistanceDocument8 pagesUse of Smooth-Treaded Test Tire in Evaluating Skid ResistanceAnonymous FjHknViPxNo ratings yet
- ART20198806Document5 pagesART20198806PSM InstituteNo ratings yet
- Mangan D (2018) - The Role of Proof Rolling in Pavement ConstructionDocument10 pagesMangan D (2018) - The Role of Proof Rolling in Pavement Constructionkentong.leeNo ratings yet
- UpdatedDocument4 pagesUpdatedMuhammad Azhar SaeedNo ratings yet
- Application of Ice Particles For Surface Decontamination: IDS 2000 June 13-16, 2000, Knoxville, TNDocument5 pagesApplication of Ice Particles For Surface Decontamination: IDS 2000 June 13-16, 2000, Knoxville, TNma qNo ratings yet
- 1 SM PDFDocument15 pages1 SM PDFahmad zeinNo ratings yet
- J18-138-R01-181027 Cal For HST Oven (#9)Document25 pagesJ18-138-R01-181027 Cal For HST Oven (#9)MichaeluiMichaeluiNo ratings yet
- Thermal Analysis of Disc Brakes Using Finite Element Method: Articles You May Be Interested inDocument6 pagesThermal Analysis of Disc Brakes Using Finite Element Method: Articles You May Be Interested inChristina Christina ChristinaNo ratings yet
- Vitton Dynamic Fracture PresentationDocument64 pagesVitton Dynamic Fracture PresentationStan VittonNo ratings yet
- Brakes Analysis of BAJA ATV PDFDocument4 pagesBrakes Analysis of BAJA ATV PDFAhmadIzzatFahmiNo ratings yet
- Civil Engineering Department Polytechnic of Sultan Azlan Shah Cc302 Highway Engineering (Highway Laboratory)Document6 pagesCivil Engineering Department Polytechnic of Sultan Azlan Shah Cc302 Highway Engineering (Highway Laboratory)dinagkar6No ratings yet
- Study of Ice and Snow Melting Process On Conductive Asphalt Solar CollectorDocument10 pagesStudy of Ice and Snow Melting Process On Conductive Asphalt Solar CollectorNgocTraiNguyenNo ratings yet
- Analysis of Disc Brake1Document8 pagesAnalysis of Disc Brake1sachinphalswal19No ratings yet
- Analysis of Disc Break by Using Fea and Ansys: R.Lakshmanaik, Dr. T. Dharma Raju, T. JayanandDocument7 pagesAnalysis of Disc Break by Using Fea and Ansys: R.Lakshmanaik, Dr. T. Dharma Raju, T. JayanandJyotsanaTrivediNo ratings yet
- SOLAR ROADWAYS20190915-35908-1mtffybDocument23 pagesSOLAR ROADWAYS20190915-35908-1mtffybsrilekhaNo ratings yet
- Structural and Thermal Analysis of Disc Brake in AutomobilesDocument9 pagesStructural and Thermal Analysis of Disc Brake in AutomobilesAkash SwainNo ratings yet
- Characteristics of Permanent DeformationDocument9 pagesCharacteristics of Permanent Deformationali.engi1992No ratings yet
- Structural Analysis of Disc Brake Rotor For Different MaterialsDocument7 pagesStructural Analysis of Disc Brake Rotor For Different MaterialsAnonymous kw8Yrp0R5rNo ratings yet
- CFD Analysis of Automotive Ventilated Disc Brake Rotor: Amol V. More, Prof - Sivakumar RDocument5 pagesCFD Analysis of Automotive Ventilated Disc Brake Rotor: Amol V. More, Prof - Sivakumar RSai Krishna SKNo ratings yet
- Fatigue AnalysisDocument23 pagesFatigue AnalysisAlexanderPetrovNo ratings yet
- 1 PBDocument9 pages1 PBhysh89000No ratings yet
- Haul Truck Tire Dynamics Due To Tire Condition PDFDocument12 pagesHaul Truck Tire Dynamics Due To Tire Condition PDFJo2020MeNo ratings yet
- 2D Analysis - Simplified MethodsDocument58 pages2D Analysis - Simplified MethodsvipkolonNo ratings yet
- Auto SockDocument5 pagesAuto Sockqwerty8830No ratings yet
- Conducting Wet Sand/Rubber Wheel Abrasion Tests: Standard Test Method ForDocument9 pagesConducting Wet Sand/Rubber Wheel Abrasion Tests: Standard Test Method ForMiguel Angel B. VazquezNo ratings yet
- Glass Guide1028 3Document3 pagesGlass Guide1028 3aristo_onan2546No ratings yet
- Effects of Ice Accretions of Aircraft AerodynamicsDocument99 pagesEffects of Ice Accretions of Aircraft Aerodynamicsirmuhidin100% (1)
- Experimental Evaluation On The Performance of Cold Mix Asphalt in Comparison With Hot Mix Asphalt For BC LayerDocument10 pagesExperimental Evaluation On The Performance of Cold Mix Asphalt in Comparison With Hot Mix Asphalt For BC LayerIJRASETPublicationsNo ratings yet
- Structural Analysis and Thermal Analysis of Automotive Ventilated Brake DiscDocument6 pagesStructural Analysis and Thermal Analysis of Automotive Ventilated Brake DiscsriramNo ratings yet
- Thermal Analysis of Disc BrakeDocument6 pagesThermal Analysis of Disc BrakeHygeia Knoll Cloa BorjaNo ratings yet
- Artikel Lucky CarolesDocument8 pagesArtikel Lucky CarolesPramudyo Bayu Pamungkas, S.T.No ratings yet
- Mechanical Properties and Performance of Engineering Ceramics and Composites XIFrom EverandMechanical Properties and Performance of Engineering Ceramics and Composites XIJonathan SalemNo ratings yet
- Wind Turbines in Cold Climates: Icing Impacts and Mitigation SystemsFrom EverandWind Turbines in Cold Climates: Icing Impacts and Mitigation SystemsNo ratings yet
- PH3 KWID DetailsDocument5 pagesPH3 KWID DetailsRavi RaiNo ratings yet
- Tire Machinerry Program NewDocument8 pagesTire Machinerry Program Newmkt mechoceanNo ratings yet
- Introduction To STATISTICAL THEORY BSC Part 1 by Prof Sher Muhammad Choudhry and Prof. Dr. Shahid KamalDocument26 pagesIntroduction To STATISTICAL THEORY BSC Part 1 by Prof Sher Muhammad Choudhry and Prof. Dr. Shahid KamalMubeen Hacker Mubeen HackerNo ratings yet
- Rolling Resistance For Bycyle TiresDocument64 pagesRolling Resistance For Bycyle Tiresadrian fasaNo ratings yet
- Mitas Tyres ENDocument27 pagesMitas Tyres ENRodrigoMacedoNo ratings yet
- Technical Guide: Counterbalanced Electric, Cushion TireDocument6 pagesTechnical Guide: Counterbalanced Electric, Cushion Tireed142857No ratings yet
- MahindraDocument12 pagesMahindraRavi Parekh100% (3)
- XK AccessoriesDocument24 pagesXK AccessoriesAnonymous GKqp4Hn100% (1)
- V.2 DriverDocument51 pagesV.2 DriverraandkadeewanaNo ratings yet
- 5 Ways To Improve Tire Uniformity Bulletin 3003Document4 pages5 Ways To Improve Tire Uniformity Bulletin 3003Durai NaiduNo ratings yet
- Dokumen - Tips Aircraft Landing Gearsthe Past Present and FutureDocument19 pagesDokumen - Tips Aircraft Landing Gearsthe Past Present and FutureLuigyBrosNo ratings yet
- 2012 Product CatalogDocument64 pages2012 Product CatalogMauro MelaNo ratings yet
- 2 2011 - Eurosteel - 2011Document6 pages2 2011 - Eurosteel - 2011Marcelo AlvesNo ratings yet
- Predicting Tractor PerfDocument13 pagesPredicting Tractor PerfSunilkumar ReddyNo ratings yet
- Royal Enfield Meteor 350 Technical SpecificationsDocument17 pagesRoyal Enfield Meteor 350 Technical SpecificationsThennarasan GNo ratings yet
- GIGANT Product Catalogue enDocument80 pagesGIGANT Product Catalogue enZsolt Truck SzétaNo ratings yet
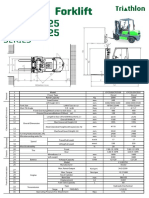
- ForkliftDocument8 pagesForkliftmyunusanisNo ratings yet
- Stress Analysis in Wheel Rim by Using Dynamic Cornering Fatigue Test Under Different ConditionsDocument6 pagesStress Analysis in Wheel Rim by Using Dynamic Cornering Fatigue Test Under Different Conditionsesmaeel ghafariNo ratings yet
- Section III-LIABILITY: Finance Copy - Pre-UseDocument6 pagesSection III-LIABILITY: Finance Copy - Pre-UseyasirNo ratings yet
- Wheel Loader: Engine Power 66,0 KW / 88,5 HP at 2.350 RPM Operating Weight 6.875 - 7.180 KG Bucket Capacity 1,05 - 1,80 MDocument12 pagesWheel Loader: Engine Power 66,0 KW / 88,5 HP at 2.350 RPM Operating Weight 6.875 - 7.180 KG Bucket Capacity 1,05 - 1,80 MJimmyNo ratings yet
- RC Blowdown MaintenanceDocument13 pagesRC Blowdown MaintenanceGustavo Olea0% (1)