You might also like
- sg3400 3125 2500HV MV 20 - DatasheetDocument1 pagesg3400 3125 2500HV MV 20 - DatasheetAnindio PrabuNo ratings yet
- MD5-HD14-2X 3X en Tcd210126ad 20230116 Inst WDocument1 pageMD5-HD14-2X 3X en Tcd210126ad 20230116 Inst WKun nNo ratings yet
- CN-6000 SERIES: Isolated Converter Unit Description Input Type Selection SwitchDocument2 pagesCN-6000 SERIES: Isolated Converter Unit Description Input Type Selection SwitchaertibraNo ratings yet
- ME AGS Kimpor KDE Series Generators Rev 08 18 08Document1 pageME AGS Kimpor KDE Series Generators Rev 08 18 08Priyan SameeraNo ratings yet
- Power Supply/Chargers Installation Guide: Eflow4Nv/Eflow4Nxv Eflow4N8V/Eflow4Nx8V Eflow4N8Dv/Eflow4Nx8DvDocument16 pagesPower Supply/Chargers Installation Guide: Eflow4Nv/Eflow4Nxv Eflow4N8V/Eflow4Nx8V Eflow4N8Dv/Eflow4Nx8DvJuan Pablo Diaz FabianNo ratings yet
- DN0005 Design Note: A Three Phase Induction Motor Drive Using A V/F ControlDocument5 pagesDN0005 Design Note: A Three Phase Induction Motor Drive Using A V/F Controlamey thakurNo ratings yet
- Set run current for 2-phase microstep motorDocument1 pageSet run current for 2-phase microstep motorAgus GPNo ratings yet
- Power Board Wiring Diagram and Component InformationDocument1 pagePower Board Wiring Diagram and Component InformationTàiLươngNo ratings yet
- Terminal Program at orDocument2 pagesTerminal Program at orsanflo7No ratings yet
- T3/T4 Series: Instruction ManualDocument1 pageT3/T4 Series: Instruction Manualyanier martinezNo ratings yet
- M1200 PinoutDocument2 pagesM1200 PinoutRaviVelugulaNo ratings yet
- CN-6000 SERIES: Isolated Converter Part Descriptions Input Type Selection SwitchDocument2 pagesCN-6000 SERIES: Isolated Converter Part Descriptions Input Type Selection Switchlogr1992No ratings yet
- TCS PID Temperature Controller MDocument2 pagesTCS PID Temperature Controller Myspipandey39No ratings yet
- Electrical Specifications 注意事項: Power Input WiringDocument2 pagesElectrical Specifications 注意事項: Power Input WiringAmmar AlkindyNo ratings yet
- JIS Q 9001 Compliant Digital Temperature ControllerDocument5 pagesJIS Q 9001 Compliant Digital Temperature ControllerTupu ConstantinNo ratings yet
- Ficha Tecnica 10KVADocument1 pageFicha Tecnica 10KVAJuanca PiaNo ratings yet
- DS SG3 4 5 6K-D Datasheet EN V11 PDFDocument1 pageDS SG3 4 5 6K-D Datasheet EN V11 PDFalbertusngNo ratings yet
- SRNE MC Series 24V 20 50A MPPT Solar Charge Controller Datasheet V1.0Document1 pageSRNE MC Series 24V 20 50A MPPT Solar Charge Controller Datasheet V1.0Perso CommeNo ratings yet
- Off GRD Solar InverterDocument2 pagesOff GRD Solar InverterSreedharNo ratings yet
- Schematic Diagram of 220 /132 /54 KV Traction SubstationDocument1 pageSchematic Diagram of 220 /132 /54 KV Traction SubstationjitendraNo ratings yet
- TK4 SERIES SPECIFICATIONSDocument2 pagesTK4 SERIES SPECIFICATIONSKunarso KunNo ratings yet
- TC-2060 Instruction Manual V05Document87 pagesTC-2060 Instruction Manual V05siegfriedNo ratings yet
- A Dimensions: (MM) B Recommended Land Pattern: (MM) : WE-CNSW SMD Common Mode Line FilterDocument6 pagesA Dimensions: (MM) B Recommended Land Pattern: (MM) : WE-CNSW SMD Common Mode Line FilterkędzierzawyNo ratings yet
- k56e-ADA SheetDocument2 pagesk56e-ADA SheetAlNo ratings yet
- ZVN3306A ZVN3306A: Typical CharacteristicsDocument4 pagesZVN3306A ZVN3306A: Typical CharacteristicsperiadithyaNo ratings yet
- 2SB1659Document1 page2SB1659Carlos Andres SaldañaNo ratings yet
- 13pin Wiring With Module ManualDocument1 page13pin Wiring With Module ManualernsteltingNo ratings yet
- LCM 60DA SpecDocument8 pagesLCM 60DA SpecAlex FilipovicNo ratings yet
- IVPAUserGuideDocument16 pagesIVPAUserGuideYouba FofanaNo ratings yet
- Specifications Discharge Curves 77 F (25 C) : Typhoon Series For General UseDocument2 pagesSpecifications Discharge Curves 77 F (25 C) : Typhoon Series For General Usemike tandocNo ratings yet
- Net2 PSU With Trigger Disconnect: OverviewDocument4 pagesNet2 PSU With Trigger Disconnect: OverviewBoris MaldonadoNo ratings yet
- mt4w en Ma Drw170799aa 20171221 He 20171226Document1 pagemt4w en Ma Drw170799aa 20171221 He 20171226Jhon ManikNo ratings yet
- Data Sheet: Electrical Data: Connection DetailsDocument22 pagesData Sheet: Electrical Data: Connection DetailssamirNo ratings yet
- Dimensions: (MM) Recommended Land Pattern: (MM) Electrical PropertiesDocument6 pagesDimensions: (MM) Recommended Land Pattern: (MM) Electrical Properties1 Cutting Edge TechnologyNo ratings yet
- SG49K5J: Multi-MPPT String Inverter For Japan SystemDocument1 pageSG49K5J: Multi-MPPT String Inverter For Japan SystemThắng CòiNo ratings yet
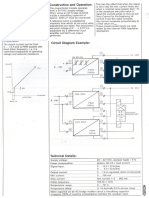
- Construction and Operation of a Proportional Amplifier ModuleDocument1 pageConstruction and Operation of a Proportional Amplifier ModulePaulo100% (1)
- Datasheet PDFDocument33 pagesDatasheet PDFPedro MoraNo ratings yet
- EC Wiring Diagrams: M3G074 Motor (Single Phase) M3G084 Motor (Single Phase)Document1 pageEC Wiring Diagrams: M3G074 Motor (Single Phase) M3G084 Motor (Single Phase)EduRoiNo ratings yet
- High EMC Immunity, RS 485 Interface Reference Design To AbsoluteDocument29 pagesHigh EMC Immunity, RS 485 Interface Reference Design To AbsoluteZaki nouiNo ratings yet
- JUPITER 9000K H1PreliminaryDocument1 pageJUPITER 9000K H1PreliminaryMarian FlorescuNo ratings yet
- Soft Starters Lovato PDFDocument9 pagesSoft Starters Lovato PDFamdatiNo ratings yet
- High Voltage FuseDocument2 pagesHigh Voltage FuseNicolas AdityaNo ratings yet
- FQP15P12/FQPF15P12: 120V P-Channel MOSFETDocument10 pagesFQP15P12/FQPF15P12: 120V P-Channel MOSFETDanilo Concepción SánchezNo ratings yet
- 6080 DiagramasDocument6 pages6080 DiagramasIAS UNACNo ratings yet
- Schematic TSS With 2 Xmer - REV 01Document1 pageSchematic TSS With 2 Xmer - REV 01shrirampandey99No ratings yet
- Honeywell ModutrolIVMotor M94 Iom D1190 632195Document12 pagesHoneywell ModutrolIVMotor M94 Iom D1190 632195Jonathan Basilio GomezNo ratings yet
- ZVN3310A ZVN3310A: Typical CharacteristicsDocument3 pagesZVN3310A ZVN3310A: Typical CharacteristicsKhaled LotfyNo ratings yet
- CN2 Illustration of the terminal arrangement of the absolute encoderDocument2 pagesCN2 Illustration of the terminal arrangement of the absolute encoderRomain JRNo ratings yet
- FX0N 3A User GuideDocument8 pagesFX0N 3A User GuideHo TaiNo ratings yet
- 2019-042 Schema Unifilare MT Rev2-SBDocument1 page2019-042 Schema Unifilare MT Rev2-SBPredrag JelenkovicNo ratings yet
- PowerWorx - SuperPower GMT SeriesDocument2 pagesPowerWorx - SuperPower GMT SeriesJohn WikieNo ratings yet
- 17012v 24V-r4Document1 page17012v 24V-r4علوي الهاشميNo ratings yet
- CPM1A-DA041: Operating ManualDocument2 pagesCPM1A-DA041: Operating Manualomnitech2No ratings yet
- 6.25 MVA MV Turnkey Station - Datasheet - 0 PDFDocument1 page6.25 MVA MV Turnkey Station - Datasheet - 0 PDFPrithvi ScorpNo ratings yet
- Tk4 Series: High Accuracy PID Temperature ControllerDocument2 pagesTk4 Series: High Accuracy PID Temperature Controlleresau hernandezNo ratings yet
- This Is Brochure-Trafo-Auto-Centrado-type-DryDocument1 pageThis Is Brochure-Trafo-Auto-Centrado-type-DryfendynovapamelaNo ratings yet
- A Fast, Easy and Reliable Solution For Installing Power Metering SystemsDocument15 pagesA Fast, Easy and Reliable Solution For Installing Power Metering SystemsÁlvaroAnabalónSalamancaNo ratings yet
- Fsd2u2p14 01 PDFDocument1 pageFsd2u2p14 01 PDFPhan AnNo ratings yet
- Hybrid Stepping Motor Driver SpecificationsDocument1 pageHybrid Stepping Motor Driver SpecificationsPhan AnNo ratings yet
- Asrock X370M ManualDocument76 pagesAsrock X370M Manualvirustest99No ratings yet
- Set run current for 2-phase microstep motorDocument1 pageSet run current for 2-phase microstep motorAgus GPNo ratings yet
- Ultrasonic Flow Meter S 460Document2 pagesUltrasonic Flow Meter S 460Agus GPNo ratings yet
- MD2U-MD20: Instruction ManualDocument1 pageMD2U-MD20: Instruction ManualAgus GPNo ratings yet
- Omron CP2E Downloading A Function BlockDocument3 pagesOmron CP2E Downloading A Function BlockAgus GPNo ratings yet
- p145 Cp2e Datasheet enDocument48 pagesp145 Cp2e Datasheet enCristiano TruccanoNo ratings yet
- Omron CP2E Brochure EnglishDocument6 pagesOmron CP2E Brochure EnglishAgus GPNo ratings yet
- ElectrostasticsDocument23 pagesElectrostasticsBhairavi MNo ratings yet
- IP68 Actuator With CC Spares CatalogueDocument8 pagesIP68 Actuator With CC Spares CatalogueParameswararao BillaNo ratings yet
- AdaptiveCoordination 6941 20200610Document14 pagesAdaptiveCoordination 6941 20200610kk mNo ratings yet
- AC Circuis: Dr. Ashwini Kumar Nayak Asst. Professor School of Electrical Sciences NistDocument28 pagesAC Circuis: Dr. Ashwini Kumar Nayak Asst. Professor School of Electrical Sciences NistssNo ratings yet
- Unit5 LMDocument13 pagesUnit5 LMsatyakar_vvkNo ratings yet
- JD194 Bs4uDocument2 pagesJD194 Bs4usaleemNo ratings yet
- SRM IST, Kattankulathur - 603 203: Types of Wiring - Staircase Wiring, Fluorescent Wiring and Godown WiringDocument11 pagesSRM IST, Kattankulathur - 603 203: Types of Wiring - Staircase Wiring, Fluorescent Wiring and Godown WiringPrisha InaniNo ratings yet
- Filling OrbitalsDocument7 pagesFilling OrbitalsPaul Renato ToppoNo ratings yet
- SataDosBoot MWPDocument2 pagesSataDosBoot MWPMehboob ChowdhuryNo ratings yet
- MAYTAG MDE28PNCGW0 TechSheet-W10589718-RevADocument8 pagesMAYTAG MDE28PNCGW0 TechSheet-W10589718-RevAAngel MartinezNo ratings yet
- Coverage Optimization and Power Reduction in SFN Using Simulated AnnealingDocument12 pagesCoverage Optimization and Power Reduction in SFN Using Simulated AnnealingHernans De La TorreNo ratings yet
- Reparacion Deutsch HD y DT Sehs9615Document17 pagesReparacion Deutsch HD y DT Sehs9615polish22No ratings yet
- Mikko Valtonen - Omnitele NewDocument20 pagesMikko Valtonen - Omnitele NewNurles TurdumanbetovNo ratings yet
- Jin Bei ManualDocument300 pagesJin Bei Manualrjan7pe100% (5)
- Tools Equipment and Testing InstrumentsDocument14 pagesTools Equipment and Testing Instrumentserwilma.purolNo ratings yet
- Source TransformationDocument5 pagesSource Transformationraovinayakm2No ratings yet
- EVOLVE ATS Panel Installation ManualDocument28 pagesEVOLVE ATS Panel Installation ManualAndre EinsteinNo ratings yet
- Bts Ericsson GSM PDFDocument7 pagesBts Ericsson GSM PDFbassward100% (1)
- TXL PLUS AL 4 8 KWDocument12 pagesTXL PLUS AL 4 8 KWNgoc Hung VuNo ratings yet
- E+H Promass E100 PDFDocument80 pagesE+H Promass E100 PDFpercecvNo ratings yet
- DANGC Manual 3-9000-537 M500Document347 pagesDANGC Manual 3-9000-537 M500Eko Tri WasistoNo ratings yet
- MicroCap Users GuideDocument220 pagesMicroCap Users GuideDarksideEE7No ratings yet
- Sony GDM f520Document75 pagesSony GDM f520gndleeNo ratings yet
- Lecture 3. Introduction To Programming Using C++Document42 pagesLecture 3. Introduction To Programming Using C++Addisu DagneNo ratings yet
- Ieee Transactions On Electromagnetic Compatibility, Vol. 51, No. 3, August 2009Document10 pagesIeee Transactions On Electromagnetic Compatibility, Vol. 51, No. 3, August 2009guicabeloNo ratings yet
- Wifi Modeling in Op NetDocument42 pagesWifi Modeling in Op NetHoàng NamNo ratings yet
- Chain,Link,Name,Value,Nominal,Min,Max SettingsDocument191 pagesChain,Link,Name,Value,Nominal,Min,Max SettingsKiyoshi Masahiro100% (2)
- Network capacity and user distribution scenario analysisDocument7 pagesNetwork capacity and user distribution scenario analysisRaul Rambo LongboenNo ratings yet
- LM339 LM239 LM2901 DatasheetDocument8 pagesLM339 LM239 LM2901 DatasheetEza RezaNo ratings yet
- MDrummer Midi Export - How - KVR AudioDocument5 pagesMDrummer Midi Export - How - KVR AudioRick Z.No ratings yet