You might also like
- Imccc 2014 83Document5 pagesImccc 2014 83joharidanilNo ratings yet
- Kostal Interface Modbus (TCP) & Sunspec: Piko Iq / Plenticore PlusDocument21 pagesKostal Interface Modbus (TCP) & Sunspec: Piko Iq / Plenticore PlusKharisma MuhammadNo ratings yet
- PLC and Arduino Interaction Based On Modbus ProtocolDocument9 pagesPLC and Arduino Interaction Based On Modbus Protocoltoptop chanelNo ratings yet
- Lab Manual: III Year/V Sem B.Tech Regulation: 2015 Sub. Code & Sub. Title: 15IT303J - Computer Networks LabDocument84 pagesLab Manual: III Year/V Sem B.Tech Regulation: 2015 Sub. Code & Sub. Title: 15IT303J - Computer Networks LabGandharavaNo ratings yet
- Yotta ManualDocument36 pagesYotta Manualnicolas.tohme121No ratings yet
- A1 Use A1-1019Document36 pagesA1 Use A1-1019sarokihNo ratings yet
- tj07200 01modbusmoduleDocument36 pagestj07200 01modbusmoduleBoryo vesNo ratings yet
- Ijett V4i4p226 PDFDocument6 pagesIjett V4i4p226 PDFAhmed AricheNo ratings yet
- ELK455E Application-2018Document36 pagesELK455E Application-2018Melek KüçükNo ratings yet
- Cat-352 MP Unit 3.1Document23 pagesCat-352 MP Unit 3.1Ashish YadavNo ratings yet
- Modbus Protocol GREE (V1.1)Document50 pagesModbus Protocol GREE (V1.1)mquaiotti0% (1)
- Lecture - 9 & 10pin Diagram 8085Document24 pagesLecture - 9 & 10pin Diagram 8085no fake NewsNo ratings yet
- Tamboli2015 Redes ModbusDocument6 pagesTamboli2015 Redes ModbusCelso JuniorNo ratings yet
- s800 Modbus PDFDocument11 pagess800 Modbus PDFMuhammad NourNo ratings yet
- " Real Time Automated Control Using PLC-VB Communication ": June 2013Document5 pages" Real Time Automated Control Using PLC-VB Communication ": June 2013Maman RukmanaNo ratings yet
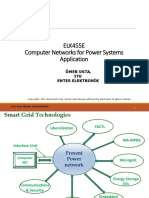
- ELK455E Computer Networks For Power Systems Application: Ömer Usta, ITU Entes ElektronikDocument37 pagesELK455E Computer Networks For Power Systems Application: Ömer Usta, ITU Entes Elektronikİbrahim ÖzdoğanNo ratings yet
- Modbus and ION Technology: Technical NoteDocument19 pagesModbus and ION Technology: Technical NoteJohn SumagüeNo ratings yet
- ModbusDocument35 pagesModbusyoussef mimmisNo ratings yet
- R18B Tech ECEIIIYearSyllabus PDFDocument36 pagesR18B Tech ECEIIIYearSyllabus PDFShivNo ratings yet
- Communication Methods (Protocols, Format & Language) For The Substation Automation & Control by MUHAMMAD UZAIR (Project Report of Course 586 B)Document10 pagesCommunication Methods (Protocols, Format & Language) For The Substation Automation & Control by MUHAMMAD UZAIR (Project Report of Course 586 B)Nima MahmoudpourNo ratings yet
- NOJA-508-02 Modbus Protocol ImplementationDocument18 pagesNOJA-508-02 Modbus Protocol Implementationpatricio2015100% (1)
- Dokumen - Tips - Modbus Rtu Configuration 2015 09 06modbus Rtu Configuration Standalone ArchitectureDocument21 pagesDokumen - Tips - Modbus Rtu Configuration 2015 09 06modbus Rtu Configuration Standalone Architectureelahmady.1409No ratings yet
- CCN CSDocument68 pagesCCN CSMUHAMMAD SHAHEERNo ratings yet
- ScanCONTROL 2900 Interface SpecificationDocument19 pagesScanCONTROL 2900 Interface SpecificationRadoje RadojicicNo ratings yet
- Modbus in Process ControlDocument8 pagesModbus in Process ControlaliNo ratings yet
- Powerlogic Ion6200 Serial Communications Protocol and Ion / Modbus Register MapDocument23 pagesPowerlogic Ion6200 Serial Communications Protocol and Ion / Modbus Register MapsergioharocolomeNo ratings yet
- ModbusaaaDocument9 pagesModbusaaaGunadevan ChandrasekaranNo ratings yet
- PM130 ModbusDocument29 pagesPM130 ModbusStanleyNo ratings yet
- Modbus Remote Communication Protocol For REC 523: Technical DescriptionDocument124 pagesModbus Remote Communication Protocol For REC 523: Technical DescriptionBata ZivanovicNo ratings yet
- Itws-Ii: Raja Vara Prasad YDocument38 pagesItws-Ii: Raja Vara Prasad YSagarSehghalNo ratings yet
- Design and Implementation of A Turbo Code System On FPGA: November 2011Document6 pagesDesign and Implementation of A Turbo Code System On FPGA: November 2011Harith NawfelNo ratings yet
- Design and Implementation of A Turbo Code System On FPGA: November 2011Document6 pagesDesign and Implementation of A Turbo Code System On FPGA: November 2011Ankit GuptaNo ratings yet
- Communication Methods For SASDocument10 pagesCommunication Methods For SASRamesh KumarNo ratings yet
- ELCOR-2 - Implementation of ModBus Protocol - Ver8Document28 pagesELCOR-2 - Implementation of ModBus Protocol - Ver8Angel Avila100% (1)
- Communication Manual For HDEC2000 and HDEC1000: Digital Excitation SystemsDocument11 pagesCommunication Manual For HDEC2000 and HDEC1000: Digital Excitation SystemsSagar TamhankarNo ratings yet
- Smith Meter: Modbus & Modbus/TCP CommunicationsDocument32 pagesSmith Meter: Modbus & Modbus/TCP CommunicationsAli Ben BrahimNo ratings yet
- Open Modbus/Tcp Specification: Release 1.0, 29 March 1999Document23 pagesOpen Modbus/Tcp Specification: Release 1.0, 29 March 1999adsad12345No ratings yet
- B48 Exp1 CNDocument7 pagesB48 Exp1 CNNikhil AherNo ratings yet
- DF PDFDocument105 pagesDF PDFNik KakadiyaNo ratings yet
- ModbusDocument5 pagesModbusRaj Kumar AhmedNo ratings yet
- Open Modbus TCP SpecificationsDocument24 pagesOpen Modbus TCP SpecificationsAssia IaqbalNo ratings yet
- Peer To Peer Basics: Last Updated: 09-April-2009 TB-980401BDocument12 pagesPeer To Peer Basics: Last Updated: 09-April-2009 TB-980401BSofyan HadiNo ratings yet
- 06 Tech Modbus enDocument27 pages06 Tech Modbus enpriyosantosaNo ratings yet
- Modbus Application Protocol SpecificationDocument45 pagesModbus Application Protocol SpecificationVictor FirmesNo ratings yet
- Forlong Modbus Protocol V3.0 - 1-4Document36 pagesForlong Modbus Protocol V3.0 - 1-4Vidian Prakasa AriantoNo ratings yet
- SB Digi CommDocument12 pagesSB Digi CommpiyushpandeyNo ratings yet
- Modbus TCP Vs RTUDocument35 pagesModbus TCP Vs RTUshahulinstrumentNo ratings yet
- Understanding The Modbus Protocol: @version@ (@date@)Document7 pagesUnderstanding The Modbus Protocol: @version@ (@date@)sanjay975No ratings yet
- Unit-Iii I/O Interfacing: Course Material (Question Bank)Document4 pagesUnit-Iii I/O Interfacing: Course Material (Question Bank)ajithNo ratings yet
- ModbusDocument16 pagesModbusagus wijanarko100% (1)
- Modbus RTU - A Comprehensive Guide To Understanding and Implementing The ProtocolDocument15 pagesModbus RTU - A Comprehensive Guide To Understanding and Implementing The ProtocolshoaibNo ratings yet
- Modbus Register Addressing and Data Type Variations: NtroductionDocument10 pagesModbus Register Addressing and Data Type Variations: NtroductionPatrick Andrade100% (1)
- MPMC 2 Marks UNIT 4Document14 pagesMPMC 2 Marks UNIT 4satishcoimbato12No ratings yet
- Cnfile 20EC413Document69 pagesCnfile 20EC413shalini KotechaNo ratings yet
- Omni FCDocument11 pagesOmni FCsyed jeelani ahmedNo ratings yet
- Specifiche Generali Protocollo MODBUS-RTU Rev. 10 (Inglese)Document18 pagesSpecifiche Generali Protocollo MODBUS-RTU Rev. 10 (Inglese)НиколайNo ratings yet
- Lecture-4 Dynamic Behavior of Typical Process Systems (Part 1)Document22 pagesLecture-4 Dynamic Behavior of Typical Process Systems (Part 1)HATAM TALAL ALINo ratings yet
- Midi PlayerDocument3 pagesMidi PlayerPratiknoNo ratings yet
- Cinput Name-"Firstname": Form Action "/target - HTML"Document11 pagesCinput Name-"Firstname": Form Action "/target - HTML"sarath sravanNo ratings yet
- GlideRecord MethodsDocument33 pagesGlideRecord Methodsabdulkareem12891No ratings yet
- Spotify v. U.S. Software Inc.Document37 pagesSpotify v. U.S. Software Inc.BillboardNo ratings yet
- VIBXPERT-II Balancer Manual en 052012Document140 pagesVIBXPERT-II Balancer Manual en 052012harisNo ratings yet
- Testing MaterialDocument54 pagesTesting MaterialkhmvarmaNo ratings yet
- KPIs - ENM Network Health Monitor KPI - (ALEX) - !!!Document13 pagesKPIs - ENM Network Health Monitor KPI - (ALEX) - !!!Владимир ЕгоровNo ratings yet
- A High Speed Machining Algorithm For CNC Machine ToolsDocument5 pagesA High Speed Machining Algorithm For CNC Machine ToolsdavidNo ratings yet
- Some FAQ For New ILP TraineeDocument88 pagesSome FAQ For New ILP TraineeArpita AroraNo ratings yet
- General: Analog Fire PanelDocument4 pagesGeneral: Analog Fire Paneleduardo gonzalezavNo ratings yet
- Debugging Guide: Enable InspectorDocument4 pagesDebugging Guide: Enable Inspectorvalle rajendranNo ratings yet
- Task-4 Shaik Suhil 18BEC2007: AlogorithmDocument8 pagesTask-4 Shaik Suhil 18BEC2007: AlogorithmSuhil IrshadNo ratings yet
- TCS SIEBEL EIM Data Migration Approach in Highly Secured EnvironmentDocument7 pagesTCS SIEBEL EIM Data Migration Approach in Highly Secured Environmentstephenraj_siebelNo ratings yet
- Cargomax 2.1: User'S ManualDocument197 pagesCargomax 2.1: User'S ManualNicu ScutaruNo ratings yet
- Cannot Install The Best Update Candidate For PackageDocument7 pagesCannot Install The Best Update Candidate For PackageAymenNo ratings yet
- Configuring Zig-Bee Modules For Point-to-Point Communication Using XCTUDocument16 pagesConfiguring Zig-Bee Modules For Point-to-Point Communication Using XCTUGurudatta PalankarNo ratings yet
- Guidelines On The Submission of Certificates DiplomaDocument6 pagesGuidelines On The Submission of Certificates DiplomayesNo ratings yet
- Instagram Hashtag CheatsheetDocument17 pagesInstagram Hashtag CheatsheetLaurithaletiixd3No ratings yet
- Geomatics and GeoinformaticsDocument22 pagesGeomatics and GeoinformaticsKevinNo ratings yet
- Beamer CernDocument18 pagesBeamer CernzeusNo ratings yet
- The Glass House - A Photoshop Tutorial SketchUp 3D Rendering Tutorials by SketchUpArtistsDocument16 pagesThe Glass House - A Photoshop Tutorial SketchUp 3D Rendering Tutorials by SketchUpArtistsAbel FleitasNo ratings yet
- Presentation On BALSAHARADocument36 pagesPresentation On BALSAHARAradhika_kambhamNo ratings yet
- Gift Card Processors 101Document16 pagesGift Card Processors 101Sharon Janet100% (1)
- SQIT3043 Chapter 8 - SQL (Latest)Document36 pagesSQIT3043 Chapter 8 - SQL (Latest)Naurah Baiti100% (1)
- Pass4sure: Everything You Need To Prepare, Learn & Pass Your Certification Exam EasilyDocument8 pagesPass4sure: Everything You Need To Prepare, Learn & Pass Your Certification Exam Easilysherif adfNo ratings yet
- OpenText Documentum XCelerated Composition Platform CE 22.2 - Deployment Guide English (EDCPKL220200-IGD-En-01)Document248 pagesOpenText Documentum XCelerated Composition Platform CE 22.2 - Deployment Guide English (EDCPKL220200-IGD-En-01)nippanisasiNo ratings yet
- Sending Data From MSFlexGrid To Excel in VB6 - Visual Basic Tutorials - DreaDocument6 pagesSending Data From MSFlexGrid To Excel in VB6 - Visual Basic Tutorials - DreaJoão Mendes100% (1)
- MT8167 Android ScatterDocument8 pagesMT8167 Android ScatterMuhsin Kiraz0% (1)
- E7000 - Instruction Manual - v10Document38 pagesE7000 - Instruction Manual - v10edcooNo ratings yet