You might also like
- Asteion Aquilion Console Service 8Document63 pagesAsteion Aquilion Console Service 8vitapablo100% (6)
- Crash N' Burn: Writing Linux Application Fault HandlersDocument25 pagesCrash N' Burn: Writing Linux Application Fault HandlersTuxology.net100% (4)
- Diomidis Spinellis - Code Reading - The Open Source Perspective. v. 1-Addison-Wesley Professional (2003) PDFDocument505 pagesDiomidis Spinellis - Code Reading - The Open Source Perspective. v. 1-Addison-Wesley Professional (2003) PDFSwati C100% (1)
- OS R19 - UNIT-2 (Ref-2)Document42 pagesOS R19 - UNIT-2 (Ref-2)Adarsh YALLANo ratings yet
- Process Concept: An Operating System Executes A Variety of ProgramsDocument28 pagesProcess Concept: An Operating System Executes A Variety of ProgramsAnonymous hzr2fbc1zMNo ratings yet
- Module 2 PDFDocument76 pagesModule 2 PDFRajadorai DsNo ratings yet
- Process & Process StateDocument25 pagesProcess & Process StateSubhashiniNo ratings yet
- ProcessesDocument33 pagesProcessesSachin RajNo ratings yet
- Lecture (Chapter 3) - AdvancedDocument54 pagesLecture (Chapter 3) - AdvancedekiholoNo ratings yet
- Ef4733d5 1642825916027Document40 pagesEf4733d5 1642825916027Prerna SinghNo ratings yet
- Processes ManagementDocument25 pagesProcesses Managementindu kaurNo ratings yet
- Outline: Process Concept Process Scheduling Operations On Processes Cooperating Processes Interprocess CommunicationDocument34 pagesOutline: Process Concept Process Scheduling Operations On Processes Cooperating Processes Interprocess Communicationapi-19786693No ratings yet
- Chapter 3: ProcessesDocument54 pagesChapter 3: ProcessesAmar SinghNo ratings yet
- ch3: Operating System ProcessesDocument48 pagesch3: Operating System Processessyedabdulalishah.786No ratings yet
- OS Chapter 3Document52 pagesOS Chapter 3Afza FatimaNo ratings yet
- Unit 1 Introduction To Operating SystemDocument37 pagesUnit 1 Introduction To Operating SystemNitesh TarbaniNo ratings yet
- Operating Systems - ch4-F06Document41 pagesOperating Systems - ch4-F06Ahmad ShdifatNo ratings yet
- Lect3: Processes Threads MultithreadingDocument46 pagesLect3: Processes Threads MultithreadingganamuNo ratings yet
- Module 2 - Processes and ThreadsDocument46 pagesModule 2 - Processes and ThreadsKailashNo ratings yet
- Inter-Process CommunicationDocument37 pagesInter-Process CommunicationreddydvNo ratings yet
- Interprocess Communication & Process Synchronization: Fall 09Document51 pagesInterprocess Communication & Process Synchronization: Fall 09drkhamuruddeenNo ratings yet
- Operating System Process ManagementDocument277 pagesOperating System Process ManagementKaviya KrishNo ratings yet
- 12-Process, Process State and PCB-02!05!2023Document269 pages12-Process, Process State and PCB-02!05!2023Betha Sai Dheeraj 21BCE3046No ratings yet
- M1 - Process ManagementDocument39 pagesM1 - Process ManagementSupreetha G SNo ratings yet
- OS Concepts - The Process, States, Control Block & SchedulingDocument6 pagesOS Concepts - The Process, States, Control Block & SchedulingSaifuddinNo ratings yet
- Chapter 2Document30 pagesChapter 2The True TomNo ratings yet
- Notes - Unit 3rd & 4thDocument44 pagesNotes - Unit 3rd & 4thHimanshi AgarwalNo ratings yet
- Processes and Process SchedulingDocument42 pagesProcesses and Process SchedulingSanjeev RNo ratings yet
- Chapter 3 ProcessesFV-2Document33 pagesChapter 3 ProcessesFV-2Hirdesh KumarNo ratings yet
- Unit-1 3Document23 pagesUnit-1 3ragulNo ratings yet
- Process Concept: Course InstructorDocument46 pagesProcess Concept: Course Instructorbakhtawar TasneemNo ratings yet
- Cheatsheet QuizDocument4 pagesCheatsheet QuizClaudia GiselleNo ratings yet
- Principles of Operating SystemsDocument56 pagesPrinciples of Operating Systemsreply2amit1986No ratings yet
- Processes and Threads ConceptsDocument59 pagesProcesses and Threads ConceptsmikiasNo ratings yet
- 02 ProcessesDocument36 pages02 Processesdas_pranjalNo ratings yet
- PROCESSES AND OPERATING SYSTEMSDocument51 pagesPROCESSES AND OPERATING SYSTEMSMaharabur Rahman ApuNo ratings yet
- Chapter 3: Processes and Interprocess Communication (IPCDocument33 pagesChapter 3: Processes and Interprocess Communication (IPCyousefNo ratings yet
- OSS - Lecture 02-1 - Processes ThreadsDocument23 pagesOSS - Lecture 02-1 - Processes ThreadsAfiq AimanNo ratings yet
- OS CH 2Document65 pagesOS CH 2Dawit TesfayeNo ratings yet
- UNIX Inter Process Communications (I)Document82 pagesUNIX Inter Process Communications (I)Roopa KumaarNo ratings yet
- IPC Methods GuideDocument31 pagesIPC Methods Guidebipin oraonNo ratings yet
- OS - Chapter-1 Process SynchronizationDocument31 pagesOS - Chapter-1 Process SynchronizationAnamika RajNo ratings yet
- Cheatsheet OS 2Document3 pagesCheatsheet OS 2alchandrairawanNo ratings yet
- IPC Mechanisms and FacilitiesDocument104 pagesIPC Mechanisms and FacilitiesG.pradeep ReddyNo ratings yet
- Interprocess Communication and SynchronizationDocument33 pagesInterprocess Communication and SynchronizationshivardhanaNo ratings yet
- Operating Systems: Process Co-Ordination & SynchronizationDocument31 pagesOperating Systems: Process Co-Ordination & SynchronizationMukeshNo ratings yet
- Inter Process Communication: Shared-Memory SystemsDocument8 pagesInter Process Communication: Shared-Memory Systemsking kholiNo ratings yet
- Chapter#02 - Process ConceptDocument35 pagesChapter#02 - Process ConceptManzar AliNo ratings yet
- Operating Systems: Chapter ThreeDocument32 pagesOperating Systems: Chapter ThreeFitawu TekolaNo ratings yet
- Tutorial-7 (IPC Introduction)Document5 pagesTutorial-7 (IPC Introduction)Aditya MittalNo ratings yet
- Module 8 Process ManagementDocument4 pagesModule 8 Process ManagementnatsuNo ratings yet
- Chapter 3: Process Concept: Al-Mansour University College Software Engineering and Information Technology DepartmentDocument56 pagesChapter 3: Process Concept: Al-Mansour University College Software Engineering and Information Technology DepartmentLana YahyaNo ratings yet
- CHPT 3 Part 2Document41 pagesCHPT 3 Part 2aliahsan007838383No ratings yet
- OS Processes Lecture 3 - Process Concepts, Scheduling and CreationDocument29 pagesOS Processes Lecture 3 - Process Concepts, Scheduling and CreationMuhammad NoumanNo ratings yet
- Processes-Process ConceptDocument28 pagesProcesses-Process ConceptDivyaNo ratings yet
- Process Management: Robin Mathur Department of Computer Science & Engineering, LpuDocument25 pagesProcess Management: Robin Mathur Department of Computer Science & Engineering, LpuGãürãv DübëyNo ratings yet
- Chapter 3: ProcessesDocument75 pagesChapter 3: ProcessesEnockNo ratings yet
- Process Scheduling AlgorithmsDocument85 pagesProcess Scheduling Algorithmsdinesh reddyNo ratings yet
- CS6401- Operating System Processes and Process ManagementDocument28 pagesCS6401- Operating System Processes and Process Managementcse.rajiv8466No ratings yet
- Operting System PDFDocument29 pagesOperting System PDFsami ullahNo ratings yet
- M T M P: Ulti Asks and Ultiple RocessesDocument23 pagesM T M P: Ulti Asks and Ultiple RocessesJayakumarSankarNo ratings yet
- 07-Interprocess CommunicationDocument14 pages07-Interprocess Communicationmuhammad iftikharNo ratings yet
- Operating Systems Interview Questions You'll Most Likely Be AskedFrom EverandOperating Systems Interview Questions You'll Most Likely Be AskedNo ratings yet
- Chapter 03Document61 pagesChapter 03FACashishkumar singhNo ratings yet
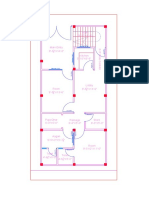
- 20X45 (Ashish - 21-5-2022) - ModelDocument1 page20X45 (Ashish - 21-5-2022) - ModelFACashishkumar singhNo ratings yet
- Distributed Systems NotesDocument41 pagesDistributed Systems NotesFACashishkumar singhNo ratings yet
- Merged Paper WTDocument11 pagesMerged Paper WTFACashishkumar singhNo ratings yet
- Kcs 602Document1 pageKcs 602FACashishkumar singhNo ratings yet
- Assignment AutomataDocument3 pagesAssignment AutomataFACashishkumar singhNo ratings yet
- OS AssignmentDocument6 pagesOS AssignmentFACashishkumar singhNo ratings yet
- Final WTDocument249 pagesFinal WTFACashishkumar singhNo ratings yet
- Os1a SlidesDocument168 pagesOs1a SlidesKevin7 7No ratings yet
- Basic Electrical Engineering KEE 101 TDocument242 pagesBasic Electrical Engineering KEE 101 TFACashishkumar singhNo ratings yet
- Unit-5 Shell ScriptingDocument40 pagesUnit-5 Shell ScriptingLinda BrownNo ratings yet
- Tasks and ThreadsDocument104 pagesTasks and Threadsyoni zerbibNo ratings yet
- Retool Your Linux Skills For Commercial UNIXDocument19 pagesRetool Your Linux Skills For Commercial UNIXPauloNo ratings yet
- Restart Java Stack from ABAP in SAPDocument6 pagesRestart Java Stack from ABAP in SAPAbdul27No ratings yet
- Pertemuan Ke 5 - Mendseain Situs Yang Baik, Kesalahan Utama MendesainDocument2,051 pagesPertemuan Ke 5 - Mendseain Situs Yang Baik, Kesalahan Utama MendesainAri SantosoNo ratings yet
- Operating Systems (R16 Iii B.Tech I Sem) Unit - VIDocument13 pagesOperating Systems (R16 Iii B.Tech I Sem) Unit - VIRajeswaranaidu DarsiNo ratings yet
- Chapter 4 ThreadsDocument31 pagesChapter 4 ThreadsAbdulrahman khalidNo ratings yet
- Programming Lab AssignmentDocument4 pagesProgramming Lab AssignmentAnubhav ShrivastavaNo ratings yet
- Daemon ProcessesDocument18 pagesDaemon Processessougata88No ratings yet
- HCL Placement PapersDocument83 pagesHCL Placement PapersrafathkNo ratings yet
- LogDocument138 pagesLogMoiz& AndreiNo ratings yet
- C Standard LibraryDocument17 pagesC Standard LibraryKondamahesh100% (1)
- HA Vcs Sapnetweaver Installation GuideDocument70 pagesHA Vcs Sapnetweaver Installation GuideShekhar GuptaNo ratings yet
- CS2106 CheatsheetDocument6 pagesCS2106 CheatsheetReynard ArdianNo ratings yet
- Mosix Instrukcja AngDocument7 pagesMosix Instrukcja AngburholNo ratings yet
- 4 Threads and ConcurrencyDocument62 pages4 Threads and ConcurrencyMahnoor IjazNo ratings yet
- Phrack Magazine Issue 62Document360 pagesPhrack Magazine Issue 62jmuzz100% (4)
- Untitled DocumentDocument28 pagesUntitled Documentrobymuiruri42No ratings yet
- CH 4Document28 pagesCH 4Suraj ShahNo ratings yet
- LoginctlDocument6 pagesLoginctlmaroNo ratings yet
- Effective Use of GDBDocument24 pagesEffective Use of GDBNeependra KhareNo ratings yet
- Mouse DriversDocument15 pagesMouse DriversJagdish GediaNo ratings yet
- Lfs201 - LabsDocument143 pagesLfs201 - LabsAngel PanceNo ratings yet
- 20220619103715D2632 - COMP6697001 2022 6 SynchronizationDocument43 pages20220619103715D2632 - COMP6697001 2022 6 SynchronizationSajid PutraNo ratings yet
- PassLeader 1Z0-821 Exam Dumps (101-150)Document26 pagesPassLeader 1Z0-821 Exam Dumps (101-150)mgm3233No ratings yet
- Concurrent Process Creation and Execution: Multi-ProcessingDocument16 pagesConcurrent Process Creation and Execution: Multi-ProcessingLujainNo ratings yet
- ICS 431-Ch3-Process ManagementDocument63 pagesICS 431-Ch3-Process ManagementSalama AlSalamaNo ratings yet