You might also like
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Dynamic Bayesian Networks: Kevin P. Murphy WWW - Ai.mit - Edu/ Murphyk 12 November 2002Document55 pagesDynamic Bayesian Networks: Kevin P. Murphy WWW - Ai.mit - Edu/ Murphyk 12 November 2002pukkapadNo ratings yet
- Forward-Backward Activation Algorithm For Hierarchical Hidden Markov ModelsDocument9 pagesForward-Backward Activation Algorithm For Hierarchical Hidden Markov ModelsJessie Mangyao NavaNo ratings yet
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- Testing The Number of Parameters of Multidimensional MLPDocument8 pagesTesting The Number of Parameters of Multidimensional MLPGalina AlexeevaNo ratings yet
- L2 - Signals (2) (During Lecture)Document3 pagesL2 - Signals (2) (During Lecture)Layla RaschNo ratings yet
- Hidden Markov Models: A Simple Markov ChainDocument46 pagesHidden Markov Models: A Simple Markov Chainv123321No ratings yet
- Factorial Hidden Markov ModelsDocument29 pagesFactorial Hidden Markov ModelsObserver123No ratings yet
- Applications of Toral Automorphisms Image WatermarkingDocument4 pagesApplications of Toral Automorphisms Image WatermarkingMuhammad MubeenNo ratings yet
- Computational Aspects of Maximum Likelihood Estimation of Autoregressive Fractionally Integratedmoving Average ModelsDocument16 pagesComputational Aspects of Maximum Likelihood Estimation of Autoregressive Fractionally Integratedmoving Average ModelsSuci Schima WulandariNo ratings yet
- Perfect Reconstruction QMF Banks For Two-Dimensional ApplicationsDocument3 pagesPerfect Reconstruction QMF Banks For Two-Dimensional ApplicationsHitendra SinghNo ratings yet
- Inference in Mixed Linear/Nonlinear State-Space Models using Sequential Monte Carlo MethodsDocument31 pagesInference in Mixed Linear/Nonlinear State-Space Models using Sequential Monte Carlo MethodsFredrik LindstenNo ratings yet
- ExamDocument3 pagesExamMohan BistaNo ratings yet
- C2 W2 SoftMaxDocument7 pagesC2 W2 SoftMaxmr ceanNo ratings yet
- B2L C2 Oseledets 4181Document3 pagesB2L C2 Oseledets 4181oscar.negrete.sNo ratings yet
- Theoretical Computer Science: Two-Dimensional Cellular Automata RecognizerDocument22 pagesTheoretical Computer Science: Two-Dimensional Cellular Automata RecognizerPaula BrazueloNo ratings yet
- Chord2vecDocument5 pagesChord2vecjlgultraboomNo ratings yet
- Interest Rates and FX ModelsDocument12 pagesInterest Rates and FX ModelsbobmezzNo ratings yet
- Fuzzy Algo UpdatedDocument8 pagesFuzzy Algo Updatednirmala periasamyNo ratings yet
- Fingerprint Classification Using Kohonen Topologic MapDocument4 pagesFingerprint Classification Using Kohonen Topologic MapMohd Razif ShamsuddinNo ratings yet
- Cam17 12Document17 pagesCam17 12peter panNo ratings yet
- Deriving Shape FunctionsDocument5 pagesDeriving Shape FunctionsKarthik NayakNo ratings yet
- Sinusoidal Wave of FDTDDocument4 pagesSinusoidal Wave of FDTDKIKINo ratings yet
- Lec19 PDFDocument9 pagesLec19 PDFjuanagallardo01No ratings yet
- Mock Question SamplesDocument3 pagesMock Question SamplesMUHAMMAD AHADNo ratings yet
- Hdout Chap 2 5210Document42 pagesHdout Chap 2 5210park ji hyeNo ratings yet
- CS 224D: Deep Learning For NLP: Lecture Notes: Part IV Spring 2015Document12 pagesCS 224D: Deep Learning For NLP: Lecture Notes: Part IV Spring 2015Kumar JNo ratings yet
- Research and Simulation of Compartmental Network Based On MatlabDocument6 pagesResearch and Simulation of Compartmental Network Based On MatlabmeenakshisravaniNo ratings yet
- Proper Orthogonal DecompositionDocument10 pagesProper Orthogonal DecompositionradheNo ratings yet
- Depmix S4Document17 pagesDepmix S4mateusfmpetryNo ratings yet
- Interference and DiffractionDocument16 pagesInterference and DiffractionmumtazaliNo ratings yet
- Modal Transient Analysis via Ramp Invariant Digital Filtering <40Document39 pagesModal Transient Analysis via Ramp Invariant Digital Filtering <40gundulpNo ratings yet
- Time Complexity of Matrix Transpose Algorithm Using Identity Matrix As Reference MatrixDocument2 pagesTime Complexity of Matrix Transpose Algorithm Using Identity Matrix As Reference MatrixPrateek YadavNo ratings yet
- ECOM031 Financial Econometrics Lecture 9: Markov Switching Models and Artificial Neural Network ModelsDocument6 pagesECOM031 Financial Econometrics Lecture 9: Markov Switching Models and Artificial Neural Network ModelsBelindennoluNo ratings yet
- HMM TutorialDocument15 pagesHMM Tutorialsamson wmariamNo ratings yet
- An Introduction To TransformersDocument8 pagesAn Introduction To TransformersNono NonoNo ratings yet
- Enhanced Medical Time-Series Forecasting Using LSTM, MDN, And Attention MechanismDocument5 pagesEnhanced Medical Time-Series Forecasting Using LSTM, MDN, And Attention MechanismParanthaman GNo ratings yet
- A Memristor Model With Peicewise Window FunctionDocument6 pagesA Memristor Model With Peicewise Window FunctionAmmuNo ratings yet
- State Space Models and The Kalman FilterDocument49 pagesState Space Models and The Kalman FilterMohammadNo ratings yet
- 05.2 PP 15 29 Wigner Ensemble and Semi-Circle LawDocument15 pages05.2 PP 15 29 Wigner Ensemble and Semi-Circle Lawqwsx098No ratings yet
- Particle Filtering Tutorial: 15 Years LaterDocument41 pagesParticle Filtering Tutorial: 15 Years LaterNabiha ReyhanNo ratings yet
- A Theory of Generic InterpretersDocument14 pagesA Theory of Generic InterpretersAnderson VasquesNo ratings yet
- Cryptacus 2018 Paper 4Document4 pagesCryptacus 2018 Paper 4Mircea PetrescuNo ratings yet
- Probabilistic Structural Dynamics Methods ComparedDocument39 pagesProbabilistic Structural Dynamics Methods Comparedejzuppelli8036No ratings yet
- Chinese Remainder Theorem in Cryptography A Brief Overview ofDocument11 pagesChinese Remainder Theorem in Cryptography A Brief Overview ofapi-2683246971% (7)
- Seismic MultiatributDocument18 pagesSeismic MultiatributLINDA ARDITA PUTRINo ratings yet
- Proceedings Letters: Section DiscontinuedDocument2 pagesProceedings Letters: Section DiscontinuedMs AghamiriNo ratings yet
- Pulse Amplitude Modulated (PAM) SignalsDocument10 pagesPulse Amplitude Modulated (PAM) SignalsYingquan LiNo ratings yet
- Vectors and Matrices, Problem Set 4: Eigenvectors, Eigenvalues and DiagonalizationDocument3 pagesVectors and Matrices, Problem Set 4: Eigenvectors, Eigenvalues and DiagonalizationRoy VeseyNo ratings yet
- Spatial Array Digital Beamforming and Filtering: Tim D. Reichard, M.SDocument19 pagesSpatial Array Digital Beamforming and Filtering: Tim D. Reichard, M.Sabhi198808No ratings yet
- Common Phase Error Estimation and Suppression in OFDMDocument5 pagesCommon Phase Error Estimation and Suppression in OFDMemadhusNo ratings yet
- Ts DynDocument35 pagesTs DynLeena KalliovirtaNo ratings yet
- DSP Lab 6 (Ztransform)Document8 pagesDSP Lab 6 (Ztransform)abdullah khalid100% (1)
- RegularLanguage-TOC_SipserDocument4 pagesRegularLanguage-TOC_Sipseralexkhan656No ratings yet
- An Iterative Method For Solving Fredholm Integral Equations of The First KindDocument26 pagesAn Iterative Method For Solving Fredholm Integral Equations of The First Kindjack1490No ratings yet
- Existence of (First Order System of Differential Equations:) Bounded Solutions of Kronecker ProductDocument6 pagesExistence of (First Order System of Differential Equations:) Bounded Solutions of Kronecker ProductAwais Mehmood BhattiNo ratings yet
- Band Edge Limit of The Scattering Matrix For Quasi-One-Dimensional Discrete SCHR Odinger OperatorsDocument26 pagesBand Edge Limit of The Scattering Matrix For Quasi-One-Dimensional Discrete SCHR Odinger OperatorsmemfilmatNo ratings yet
- Time series segmentation for mobile context recognitionDocument8 pagesTime series segmentation for mobile context recognitionQiming XieNo ratings yet
- Wavelet Polynomials For Solving Linear Fractional Partial Differential EquationsDocument10 pagesWavelet Polynomials For Solving Linear Fractional Partial Differential EquationsKarwan JwamerNo ratings yet
- Dynamic Logistic RegressionDocument7 pagesDynamic Logistic Regressiongchagas6019No ratings yet
- The Hierarchical Equal Risk Contribution PortfolioDocument26 pagesThe Hierarchical Equal Risk Contribution Portfoliogchagas6019No ratings yet
- Risks 07 00074 PDFDocument27 pagesRisks 07 00074 PDFgchagas6019No ratings yet
- Stocks, Bonds, Options, Futures and Portfolio Insurance: A Rose by Any Other Name...Document22 pagesStocks, Bonds, Options, Futures and Portfolio Insurance: A Rose by Any Other Name...gchagas6019No ratings yet
- Hedge Fund Start-Up Guide - Bloomberg, AIMADocument43 pagesHedge Fund Start-Up Guide - Bloomberg, AIMAgchagas6019100% (1)
- Clarke, Silva, & Thorley 2012 - Risk Parity, Maximum Diversification and Minimum Variance - An Analytic PerspectiveDocument15 pagesClarke, Silva, & Thorley 2012 - Risk Parity, Maximum Diversification and Minimum Variance - An Analytic Perspectivegchagas6019No ratings yet
- Mkaouar, & Prigent 2010 - Constant Proportion Portfolio Insurance Effectiveness Under Transaction CostsDocument11 pagesMkaouar, & Prigent 2010 - Constant Proportion Portfolio Insurance Effectiveness Under Transaction Costsgchagas6019No ratings yet
- Risk Budgeting and Portable AlphasDocument8 pagesRisk Budgeting and Portable Alphasgchagas6019No ratings yet
- 09 - Configuring Cisco ASADocument8 pages09 - Configuring Cisco ASAMorad Alabsy100% (1)
- Circular XIDocument2 pagesCircular XIRavi Teja RTNo ratings yet
- Cursor Movement Using Hand Gestures in Python and Arduino UnoDocument7 pagesCursor Movement Using Hand Gestures in Python and Arduino UnoIJRASETPublicationsNo ratings yet
- NPTEL Online Certification Courses Programming in Java Assignment 5 MCQ QuestionsDocument5 pagesNPTEL Online Certification Courses Programming in Java Assignment 5 MCQ QuestionsAbhinav ReddyNo ratings yet
- Major Project SynopsisDocument11 pagesMajor Project SynopsisSankalp VarshneyNo ratings yet
- The Internet MythDocument169 pagesThe Internet MythRobert Adrian QuinteroNo ratings yet
- Isolation AmplifierDocument11 pagesIsolation AmplifierSadikielNo ratings yet
- VP Chief Technology Officer in New York City Resume Thomas BroccolettiDocument3 pagesVP Chief Technology Officer in New York City Resume Thomas BroccolettiThomasBroccolettiNo ratings yet
- Nynas Transformer Oil - Nytro Orion II: Naphthenics Product Data Sheet 2009-01-06Document1 pageNynas Transformer Oil - Nytro Orion II: Naphthenics Product Data Sheet 2009-01-06ANGEL STRAGLIATINo ratings yet
- EBS 122 Cum RCD HCMDocument187 pagesEBS 122 Cum RCD HCMmohammed akbar aliNo ratings yet
- Digital Products Decommissioning Checklist: The Purpose of This Document Is ToDocument7 pagesDigital Products Decommissioning Checklist: The Purpose of This Document Is ToadiNo ratings yet
- Og&C Standard Work Process Procedure Welder QualificationDocument11 pagesOg&C Standard Work Process Procedure Welder QualificationGordon LongforganNo ratings yet
- Computer Terms GlossaryDocument28 pagesComputer Terms GlossaryAngélica AlzateNo ratings yet
- E-Tech ReviewerDocument10 pagesE-Tech ReviewerPsalm De VeraNo ratings yet
- Iphone X Schematic - 820-00863-09+820-00864-06Document92 pagesIphone X Schematic - 820-00863-09+820-00864-06Hans LütherNo ratings yet
- Unidrive M200: Integration Through Flexible CommunicationsDocument16 pagesUnidrive M200: Integration Through Flexible CommunicationsValery CarranzaNo ratings yet
- CC Unit4Document8 pagesCC Unit4Harsh RajputNo ratings yet
- Building Construction ARP-431: Submitted By: Shreya Sood 17BAR1013Document17 pagesBuilding Construction ARP-431: Submitted By: Shreya Sood 17BAR1013Rithika Raju ChallapuramNo ratings yet
- GOST Regulations GuideDocument10 pagesGOST Regulations Guidehemant1886No ratings yet
- Menu utama komponen KRDocument33 pagesMenu utama komponen KRRizkye Arvia Nantha100% (1)
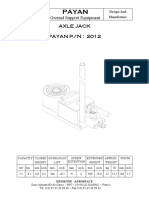
- Payan: Axle Jack PAYAN P/N: 2012Document38 pagesPayan: Axle Jack PAYAN P/N: 2012gmailNo ratings yet
- Proper Simulation of Chemical-EOR Pilots - A Real Case Study: Sector-Model GenerationDocument2 pagesProper Simulation of Chemical-EOR Pilots - A Real Case Study: Sector-Model GenerationVeronicaNo ratings yet
- Cessna 208 (Caravan) : Standard De-Ice BootsDocument174 pagesCessna 208 (Caravan) : Standard De-Ice BootsNaguibNo ratings yet
- XPAIB006EN I RefGuide InstrSW WebDocument41 pagesXPAIB006EN I RefGuide InstrSW WebXavier ArévaloNo ratings yet
- Steval lll012v1Document5 pagesSteval lll012v1Angelė LNo ratings yet
- Installation and Operation Instruction: Flowcon Green 15-40 MM (1/2"-1 1/2")Document2 pagesInstallation and Operation Instruction: Flowcon Green 15-40 MM (1/2"-1 1/2")Gabriel Arriagada UsachNo ratings yet
- Day 3 Multiplying Polynomials Homework Assignment OnlyDocument2 pagesDay 3 Multiplying Polynomials Homework Assignment Onlyapi-316619857No ratings yet
- Appian Developer Resume Example With Appropriate SkillsDocument9 pagesAppian Developer Resume Example With Appropriate Skillspega4beulahNo ratings yet
- The Digital Butterfly EffectDocument7 pagesThe Digital Butterfly EffectAnonymous PXX1LANo ratings yet
- Studi Pengaruh Waktu Pembakaran Terhadap Kuat Tekan BataDocument12 pagesStudi Pengaruh Waktu Pembakaran Terhadap Kuat Tekan BataIcha ChairunNo ratings yet
- Generative AI: The Insights You Need from Harvard Business ReviewFrom EverandGenerative AI: The Insights You Need from Harvard Business ReviewRating: 4.5 out of 5 stars4.5/5 (2)
- ChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindFrom EverandChatGPT Money Machine 2024 - The Ultimate Chatbot Cheat Sheet to Go From Clueless Noob to Prompt Prodigy Fast! Complete AI Beginner’s Course to Catch the GPT Gold Rush Before It Leaves You BehindNo ratings yet
- ChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveFrom EverandChatGPT Side Hustles 2024 - Unlock the Digital Goldmine and Get AI Working for You Fast with More Than 85 Side Hustle Ideas to Boost Passive Income, Create New Cash Flow, and Get Ahead of the CurveNo ratings yet
- Machine Learning: The Ultimate Beginner's Guide to Learn Machine Learning, Artificial Intelligence & Neural Networks Step by StepFrom EverandMachine Learning: The Ultimate Beginner's Guide to Learn Machine Learning, Artificial Intelligence & Neural Networks Step by StepRating: 4.5 out of 5 stars4.5/5 (19)
- The Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldFrom EverandThe Master Algorithm: How the Quest for the Ultimate Learning Machine Will Remake Our WorldRating: 4.5 out of 5 stars4.5/5 (107)
- ChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessFrom EverandChatGPT Millionaire 2024 - Bot-Driven Side Hustles, Prompt Engineering Shortcut Secrets, and Automated Income Streams that Print Money While You Sleep. The Ultimate Beginner’s Guide for AI BusinessNo ratings yet
- Scary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldFrom EverandScary Smart: The Future of Artificial Intelligence and How You Can Save Our WorldRating: 4.5 out of 5 stars4.5/5 (55)
- Artificial Intelligence: The Insights You Need from Harvard Business ReviewFrom EverandArtificial Intelligence: The Insights You Need from Harvard Business ReviewRating: 4.5 out of 5 stars4.5/5 (104)
- Demystifying Prompt Engineering: AI Prompts at Your Fingertips (A Step-By-Step Guide)From EverandDemystifying Prompt Engineering: AI Prompts at Your Fingertips (A Step-By-Step Guide)Rating: 4 out of 5 stars4/5 (1)
- The AI Advantage: How to Put the Artificial Intelligence Revolution to WorkFrom EverandThe AI Advantage: How to Put the Artificial Intelligence Revolution to WorkRating: 4 out of 5 stars4/5 (7)
- Who's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesFrom EverandWho's Afraid of AI?: Fear and Promise in the Age of Thinking MachinesRating: 4.5 out of 5 stars4.5/5 (13)
- 2084: Artificial Intelligence and the Future of HumanityFrom Everand2084: Artificial Intelligence and the Future of HumanityRating: 4 out of 5 stars4/5 (81)
- Midjourney Mastery - The Ultimate Handbook of PromptsFrom EverandMidjourney Mastery - The Ultimate Handbook of PromptsRating: 4.5 out of 5 stars4.5/5 (2)
- Artificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.From EverandArtificial Intelligence: The Complete Beginner’s Guide to the Future of A.I.Rating: 4 out of 5 stars4/5 (15)
- HBR's 10 Must Reads on AI, Analytics, and the New Machine AgeFrom EverandHBR's 10 Must Reads on AI, Analytics, and the New Machine AgeRating: 4.5 out of 5 stars4.5/5 (69)
- Artificial Intelligence: A Guide for Thinking HumansFrom EverandArtificial Intelligence: A Guide for Thinking HumansRating: 4.5 out of 5 stars4.5/5 (30)
- Power and Prediction: The Disruptive Economics of Artificial IntelligenceFrom EverandPower and Prediction: The Disruptive Economics of Artificial IntelligenceRating: 4.5 out of 5 stars4.5/5 (38)
- Mastering Large Language Models: Advanced techniques, applications, cutting-edge methods, and top LLMs (English Edition)From EverandMastering Large Language Models: Advanced techniques, applications, cutting-edge methods, and top LLMs (English Edition)No ratings yet
- AI and Machine Learning for Coders: A Programmer's Guide to Artificial IntelligenceFrom EverandAI and Machine Learning for Coders: A Programmer's Guide to Artificial IntelligenceRating: 4 out of 5 stars4/5 (2)
- The Digital Mind: How Science is Redefining HumanityFrom EverandThe Digital Mind: How Science is Redefining HumanityRating: 4.5 out of 5 stars4.5/5 (2)
- Make Money with ChatGPT: Your Guide to Making Passive Income Online with Ease using AI: AI Wealth MasteryFrom EverandMake Money with ChatGPT: Your Guide to Making Passive Income Online with Ease using AI: AI Wealth MasteryNo ratings yet
- Your AI Survival Guide: Scraped Knees, Bruised Elbows, and Lessons Learned from Real-World AI DeploymentsFrom EverandYour AI Survival Guide: Scraped Knees, Bruised Elbows, and Lessons Learned from Real-World AI DeploymentsNo ratings yet