You might also like
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - C - 10Document6 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - C - 10Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Enh - A - 16Document8 pagesOsmeoisis 2022-09-06 15-33-19PIC - Enh - A - 16Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Enh - A - 5Document22 pagesOsmeoisis 2022-09-06 15-33-19PIC - Enh - A - 5Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Enh - C - 12Document41 pagesOsmeoisis 2022-09-06 15-33-19PIC - Enh - C - 12Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - A - 4Document20 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - A - 4Tomás BurónNo ratings yet
- Timers and PWM on PIC MicrocontrollersDocument38 pagesTimers and PWM on PIC MicrocontrollersThanh LeNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - A - 17Document40 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - A - 17Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Enh-Mig - C - 8Document7 pagesOsmeoisis 2022-09-06 15-33-19PIC - Enh-Mig - C - 8Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Enh - A - 15Document48 pagesOsmeoisis 2022-09-06 15-33-19PIC - Enh - A - 15Tomás BurónNo ratings yet
- Newbie's Guide To AVR Timers: Dean CameraDocument27 pagesNewbie's Guide To AVR Timers: Dean CameracoraztoNo ratings yet
- Introduction To TIMER Before Exp 3Document24 pagesIntroduction To TIMER Before Exp 3saira isratNo ratings yet
- Microcontrollers and Its Applications: Shivaum Heranjal L27+28 17BEC0315 Padmini T NDocument6 pagesMicrocontrollers and Its Applications: Shivaum Heranjal L27+28 17BEC0315 Padmini T NShivaum Heranjal100% (1)
- Introduction To PIC Programming: Baseline Architecture and Assembly LanguageDocument17 pagesIntroduction To PIC Programming: Baseline Architecture and Assembly Languagemorcov19No ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - A - 15Document42 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - A - 15Tomás BurónNo ratings yet
- Chapter 3 - Timer Counter ModulesDocument20 pagesChapter 3 - Timer Counter Modulespham tamNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - C - 11Document34 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - C - 11Tomás BurónNo ratings yet
- Newbie's Guide To AVR TimersDocument23 pagesNewbie's Guide To AVR TimersNitish Kumar100% (1)
- BooksDocument14 pagesBookssravyaNo ratings yet
- LPC1768 Timer Programming for Precise DelaysDocument18 pagesLPC1768 Timer Programming for Precise DelaysMohit VermaNo ratings yet
- Sesion - 11 - Timer 2 y PWMDocument22 pagesSesion - 11 - Timer 2 y PWMMafa GuillénNo ratings yet
- PIC16f877a TimerDocument9 pagesPIC16f877a Timerjohn moron100% (2)
- Module 5Document19 pagesModule 5Aditya AgarwalNo ratings yet
- PIC16F87XA: 6.4 Timer1 Operation in Asynchronous Counter ModeDocument5 pagesPIC16F87XA: 6.4 Timer1 Operation in Asynchronous Counter Modevitor valeNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Enh - A - 18Document50 pagesOsmeoisis 2022-09-06 15-33-19PIC - Enh - A - 18Tomás BurónNo ratings yet
- AVR Timer Tutorial for BeginnersDocument19 pagesAVR Timer Tutorial for BeginnersresonantFractalNo ratings yet
- CSULB - CECS 285 - Chapter Nine Fall 2010 - R.W. Allison 1Document17 pagesCSULB - CECS 285 - Chapter Nine Fall 2010 - R.W. Allison 1Santosh Kumar GowdaNo ratings yet
- Iv TimersDocument48 pagesIv TimersanishthNo ratings yet
- PIC (PWM PGM Steps)Document20 pagesPIC (PWM PGM Steps)Elena Gilbert100% (2)
- AVR Timers - TIMER0: Problem StatementDocument7 pagesAVR Timers - TIMER0: Problem StatementFarid Baka100% (1)
- Ard TimersDocument60 pagesArd TimersMarcio Augusto BerenguelNo ratings yet
- Timers and Interrupts ExperimentDocument7 pagesTimers and Interrupts ExperimentPrakash PrasadNo ratings yet
- Microcontroller timer functions and SFRsDocument53 pagesMicrocontroller timer functions and SFRsMoumita Bera100% (3)
- LPC1769 Interrupt ProgramDocument9 pagesLPC1769 Interrupt Programprathap100% (1)
- Timer - Programming SaDocument7 pagesTimer - Programming SaDK White LionNo ratings yet
- Ec6504 MPMC Unit 5Document192 pagesEc6504 MPMC Unit 5Gomathi PsNo ratings yet
- Exp7 ReportDocument8 pagesExp7 ReportMEGHANA R 20BEC1042No ratings yet
- 8051 Timer Programming GuideDocument47 pages8051 Timer Programming GuideTwishaNo ratings yet
- Arduino Timer InterruptsDocument18 pagesArduino Timer InterruptsJose Luis SabinoNo ratings yet
- MCES 18CS44 Unit4 2020 TIMERSDocument13 pagesMCES 18CS44 Unit4 2020 TIMERSSAKSHAM PRASADNo ratings yet
- Timers & CountersDocument18 pagesTimers & CountersAbdelRahman AtefNo ratings yet
- SECA3019 - Embedded Processors Lecture 2.3 Timers in ATMEGA328Document18 pagesSECA3019 - Embedded Processors Lecture 2.3 Timers in ATMEGA328sugadev74No ratings yet
- Flashing Rate and Clock Generator in SIPROTEC 4 Relays: ForewordDocument4 pagesFlashing Rate and Clock Generator in SIPROTEC 4 Relays: Forewordm khNo ratings yet
- Timer 1Document6 pagesTimer 1joxenoNo ratings yet
- Avr TimersDocument21 pagesAvr TimersfarcasiunNo ratings yet
- 8051 TimersDocument55 pages8051 TimersAbhiroop ReddyNo ratings yet
- Chapter 3 TimerDocument49 pagesChapter 3 TimerFahmi LJNo ratings yet
- Module - 4 NotesDocument46 pagesModule - 4 NotesManjuanthNo ratings yet
- Microprocessors and Microcontrollers Lab: Title: ComponentsDocument8 pagesMicroprocessors and Microcontrollers Lab: Title: ComponentsGhulam E Muhammad UsmanNo ratings yet
- Basics of Interrupts.: Steps Taken by Processor While Processing An InterruptDocument10 pagesBasics of Interrupts.: Steps Taken by Processor While Processing An InterruptAmy OliverNo ratings yet
- PWM and Timer Measurements of Signal On/Off TimesDocument7 pagesPWM and Timer Measurements of Signal On/Off TimesJonathan WongNo ratings yet
- Microcontroller and Its Appl Ans (NEC 022-IiS)Document5 pagesMicrocontroller and Its Appl Ans (NEC 022-IiS)Sachin PalNo ratings yet
- Programming Timers on the 89S52 MicrocontrollerDocument48 pagesProgramming Timers on the 89S52 MicrocontrollerManjunath ShimogaNo ratings yet
- Book PIC Microcontrollers-Chapter 4 TimersDocument13 pagesBook PIC Microcontrollers-Chapter 4 TimersHammamiSalahNo ratings yet
- LAB6 TimerDocument8 pagesLAB6 TimerMalak Al-AshiNo ratings yet
- Timers, Counters, Watch Dog TimerDocument7 pagesTimers, Counters, Watch Dog TimerAnil SaiNo ratings yet
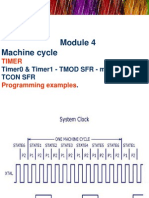
- Module 4Document22 pagesModule 4Rohit AnejaNo ratings yet
- Bec0355 Micro Lab Task 05Document7 pagesBec0355 Micro Lab Task 05Dinesh tallaparthiNo ratings yet
- Section 9.1 Programming 8051 TimersDocument8 pagesSection 9.1 Programming 8051 TimersAkshitKocherNo ratings yet
- PWM ControlDocument28 pagesPWM ControlAgus Lesmana100% (2)
- Projects With Microcontrollers And PICCFrom EverandProjects With Microcontrollers And PICCRating: 5 out of 5 stars5/5 (1)
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - C - 4Document21 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - C - 4Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - C - 13Document19 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - C - 13Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - C - 12Document42 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - C - 12Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - C - 6Document34 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - C - 6Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - A - 19Document18 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - A - 19Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - C - 7Document16 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - C - 7Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - C - 8Document40 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - C - 8Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - C - 2Document18 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - C - 2Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - C - 11Document34 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - C - 11Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - A - 15Document42 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - A - 15Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - A - 12Document24 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - A - 12Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - C - 1Document21 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - C - 1Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - C - 5Document16 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - C - 5Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - C - 9Document32 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - C - 9Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - A - 17Document40 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - A - 17Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - A - 18Document44 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - A - 18Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - A - 13Document30 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - A - 13Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - A - 9Document32 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - A - 9Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - A - 11Document19 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - A - 11Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - A - 1Document23 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - A - 1Tomás BurónNo ratings yet
- 13530104709-PIC Mid A 14Document27 pages13530104709-PIC Mid A 14Anderson DosantosNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - A - 10Document22 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - A - 10Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - C - 3Document31 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - C - 3Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - A - 8Document19 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - A - 8Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - A - 6Document37 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - A - 6Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - A - 3Document15 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - A - 3Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - A - 7Document23 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - A - 7Tomás BurónNo ratings yet
- Osmeoisis 2022-09-06 15-33-19PIC - Mid - A - 5Document15 pagesOsmeoisis 2022-09-06 15-33-19PIC - Mid - A - 5Tomás BurónNo ratings yet
- Lecture 3 Numerical MethodsDocument61 pagesLecture 3 Numerical MethodsLeandro Di BartoloNo ratings yet
- Sensor Guided Surveillance Robot For Enhanced SecurityDocument42 pagesSensor Guided Surveillance Robot For Enhanced Security208r1a66f0No ratings yet
- ANSYS Motion 2019 R3 User Subroutine Tutorial PDFDocument23 pagesANSYS Motion 2019 R3 User Subroutine Tutorial PDFbadaboyNo ratings yet
- Sitara Boot Camp 10 Uboot Linux Kernel Board PortDocument110 pagesSitara Boot Camp 10 Uboot Linux Kernel Board PortP MNo ratings yet
- Unit 7 Protection and SecurityDocument18 pagesUnit 7 Protection and SecurityMeghana AmmuNo ratings yet
- 10-DS Agile GTW Overview - Rev GDocument25 pages10-DS Agile GTW Overview - Rev GrpshvjuNo ratings yet
- LIWC 22manual DevelopmentandPsychometrics - DRSDocument49 pagesLIWC 22manual DevelopmentandPsychometrics - DRSDilaraNo ratings yet
- Vendor ManagementDocument6 pagesVendor ManagementArun KarathNo ratings yet
- ICWI2010 - Ecommerce-SemioticanoecommerceDocument456 pagesICWI2010 - Ecommerce-SemioticanoecommerceRafaella Aline Lopes Neitzel100% (1)
- Master Document MRB Index Rev TDocument10 pagesMaster Document MRB Index Rev TDele TedNo ratings yet
- Hill CipherDocument4 pagesHill CipherraayaarNo ratings yet
- Automation 360 Migration FAQ: Question Quick LinksDocument13 pagesAutomation 360 Migration FAQ: Question Quick LinksSVM SrgmNo ratings yet
- Data VisualisationDocument9 pagesData VisualisationKrujacem FkcfNo ratings yet
- லாக்கப்Document146 pagesலாக்கப்Dhanapal R100% (1)
- LogDocument62 pagesLogShela DiahNo ratings yet
- EXCEL EXAM GUIDEDocument3 pagesEXCEL EXAM GUIDEJackson MwangiNo ratings yet
- Heuristic EvaluationDocument10 pagesHeuristic Evaluationkasp0021No ratings yet
- Propeller Led Display For ImagesDocument7 pagesPropeller Led Display For ImagesMuhamad SaipudinNo ratings yet
- Krita Secrets Full Version 2021-12-19Document145 pagesKrita Secrets Full Version 2021-12-19Lu CompiscastelNo ratings yet
- Chidamber & Kemerer Suite of MetricsDocument12 pagesChidamber & Kemerer Suite of Metricsmanjunath dupatiNo ratings yet
- Curriculam Vitae: Lavanya E Email: Mob: +Document4 pagesCurriculam Vitae: Lavanya E Email: Mob: +Vishal FernandesNo ratings yet
- RFID Color Screen Intelligent GSM Network Alarm SystemDocument18 pagesRFID Color Screen Intelligent GSM Network Alarm Systemkusuma wijayaNo ratings yet
- Book BankDocument10 pagesBook Bank02 - Adwin PrajishaNo ratings yet
- Bug Bounty Hunter ToolsDocument17 pagesBug Bounty Hunter ToolsGabrielNo ratings yet
- OOPJDocument2 pagesOOPJU. M. SreekanthNo ratings yet
- Excel Formulas With ExamplesDocument140 pagesExcel Formulas With ExamplesAshish SaxenaNo ratings yet
- A+ Blog - SSLC - Model Theory Questions - 2023 - emDocument37 pagesA+ Blog - SSLC - Model Theory Questions - 2023 - emhadiyxxNo ratings yet
- CS Investigatory On Grocery ShopDocument26 pagesCS Investigatory On Grocery ShopIshika SinghNo ratings yet
- Linux Journal CGPDocument100 pagesLinux Journal CGPwaydenieNo ratings yet
- Circuit Maker 2000 Trial EULADocument3 pagesCircuit Maker 2000 Trial EULARamiro NarvaezNo ratings yet