You might also like
- A Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"From EverandA Brief Introduction to MATLAB: Taken From the Book "MATLAB for Beginners: A Gentle Approach"Rating: 2.5 out of 5 stars2.5/5 (2)
- Algorithms Solution - 2Document9 pagesAlgorithms Solution - 2MiltonNo ratings yet
- Numerical Optimization: Unit 9: Penalty Method and Interior Point Method Unit 10: Filter Method and The Maratos EffectDocument24 pagesNumerical Optimization: Unit 9: Penalty Method and Interior Point Method Unit 10: Filter Method and The Maratos EffectkahvumidragaispeciNo ratings yet
- HMW1 PDFDocument11 pagesHMW1 PDFeduardolarangeiraNo ratings yet
- CS 229, Autumn 2012 Problem Set #1 Solutions: Supervised LearningDocument16 pagesCS 229, Autumn 2012 Problem Set #1 Solutions: Supervised LearningAvinash JaiswalNo ratings yet
- Adaptive Control Theory: Pole-Placement and Indirect STRDocument48 pagesAdaptive Control Theory: Pole-Placement and Indirect STRThanh NguyenNo ratings yet
- Asymptotic Notations and Algorithm Analysis Techniques Under 40 CharactersDocument6 pagesAsymptotic Notations and Algorithm Analysis Techniques Under 40 CharactersDev AgarwalNo ratings yet
- Advanced Control Systems TechniquesDocument3 pagesAdvanced Control Systems TechniquesGianluca CastrinesiNo ratings yet
- 2009 2 Art 04Document8 pages2009 2 Art 04Raja RamNo ratings yet
- HW1 SolDocument7 pagesHW1 SolprakshiNo ratings yet
- Numerical Methods To Solve Systems of Equations in PythonDocument12 pagesNumerical Methods To Solve Systems of Equations in Pythontheodor_munteanuNo ratings yet
- Maulina Putri Lestari - M0220052 - Tugas 1Document5 pagesMaulina Putri Lestari - M0220052 - Tugas 1Maulina Putri LestariNo ratings yet
- CSCI 3110 Assignment 6 Solutions: December 5, 2012Document5 pagesCSCI 3110 Assignment 6 Solutions: December 5, 2012AdamNo ratings yet
- Numerical Methods For Solutions of Equations in PythonDocument9 pagesNumerical Methods For Solutions of Equations in Pythontheodor_munteanuNo ratings yet
- CS 229, Summer 2019 Problem Set #1 SolutionsDocument22 pagesCS 229, Summer 2019 Problem Set #1 SolutionsSasanka Sekhar SahuNo ratings yet
- Lab 8Document13 pagesLab 8naimoonNo ratings yet
- 小考20181026 (第一次期中考)Document8 pages小考20181026 (第一次期中考)940984326No ratings yet
- Finite Difference ProofDocument7 pagesFinite Difference Proofsatish315kumarNo ratings yet
- EEE354 Assignment Answer SchemeDocument7 pagesEEE354 Assignment Answer SchemeIzzat AzmanNo ratings yet
- MIT6 006F11 ps1 PDFDocument6 pagesMIT6 006F11 ps1 PDFlinchiNo ratings yet
- ISE503 Project ReportDocument6 pagesISE503 Project ReportDidik HariadiNo ratings yet
- 1 s2.0 S1474667015364715 MainjlbDocument6 pages1 s2.0 S1474667015364715 MainjlbVigneshRamakrishnanNo ratings yet
- Lecture 01 - Review of FundamentalsDocument6 pagesLecture 01 - Review of FundamentalsCaden LeeNo ratings yet
- Daa 4 Unit DetailsDocument14 pagesDaa 4 Unit DetailsSathyendra Kumar VNo ratings yet
- Mathematical Physics Sample Exam 1Document5 pagesMathematical Physics Sample Exam 1Perry EsguerraNo ratings yet
- Maulina Putri Lestari - M0220052 - Tugas 3Document10 pagesMaulina Putri Lestari - M0220052 - Tugas 3Maulina Putri LestariNo ratings yet
- Ntu 3001Document1 pageNtu 3001Chris TanNo ratings yet
- Ch8 (3) Numerical IntegrationDocument19 pagesCh8 (3) Numerical Integrationআসিফ রেজাNo ratings yet
- Linearization and Stability in SimulinkDocument5 pagesLinearization and Stability in SimulinkPhạm Ngọc HòaNo ratings yet
- SOR December 1 2020 Lecture Notes TuesdayDocument7 pagesSOR December 1 2020 Lecture Notes TuesdayJohn Larry Pasion02No ratings yet
- SOV ConductionDocument47 pagesSOV ConductionRanadip AcharyaNo ratings yet
- Paper 23-A New Type Method For The Structured Variational Inequalities ProblemDocument4 pagesPaper 23-A New Type Method For The Structured Variational Inequalities ProblemEditor IJACSANo ratings yet
- Advanced Computational Methods: Numerical IntegrationDocument59 pagesAdvanced Computational Methods: Numerical IntegrationMohammed HamdyNo ratings yet
- DAADocument62 pagesDAAanon_385854451No ratings yet
- AssignmentDocument4 pagesAssignmentOscar OyakapelNo ratings yet
- ECE 4330 Assignment 4Document3 pagesECE 4330 Assignment 4Sajjad HussainNo ratings yet
- 3.1 Least-Squares ProblemsDocument28 pages3.1 Least-Squares ProblemsGabo GarcíaNo ratings yet
- Algorithms AnalysisDocument25 pagesAlgorithms Analysislyhoangkhang831No ratings yet
- Worksheet Solution 4Document8 pagesWorksheet Solution 4abdelrahmanhelal13No ratings yet
- Algorithms - : SolutionsDocument11 pagesAlgorithms - : SolutionsDagnachewNo ratings yet
- MATH412 QUIZ 3 SolutionDocument5 pagesMATH412 QUIZ 3 SolutionAhmad Zen FiraNo ratings yet
- Direct and Indirect Approaches For Solving Optimal Control Problems in MATLABDocument13 pagesDirect and Indirect Approaches For Solving Optimal Control Problems in MATLABBharat MahajanNo ratings yet
- Unit II D&C and Greedy 2022IDocument81 pagesUnit II D&C and Greedy 2022I1367 AYUSHA KATEPALLEWARNo ratings yet
- Shooting Method 5Document7 pagesShooting Method 5مرتضى عباسNo ratings yet
- Solutions To Exercises 8.1: Section 8.1 Partial Differential Equations in Physics and EngineeringDocument21 pagesSolutions To Exercises 8.1: Section 8.1 Partial Differential Equations in Physics and EngineeringTri Phương NguyễnNo ratings yet
- Past PapersDocument12 pagesPast PapersHerlan SetiadiNo ratings yet
- Discrete-Time Signals and Systems: Gao Xinbo School of E.E., Xidian UnivDocument40 pagesDiscrete-Time Signals and Systems: Gao Xinbo School of E.E., Xidian UnivNory Elago CagatinNo ratings yet
- Linearization Stability Definitions Simulation in Matlab/SimulinkDocument39 pagesLinearization Stability Definitions Simulation in Matlab/SimulinkSachin ShendeNo ratings yet
- CS203 Week6Document7 pagesCS203 Week6Rajan KumarNo ratings yet
- Process Modelling and OptimizationDocument11 pagesProcess Modelling and Optimizationavish mehtaNo ratings yet
- Divide and Conquer Strategy for Computer AlgorithmsDocument85 pagesDivide and Conquer Strategy for Computer AlgorithmsMahesh PandeNo ratings yet
- Weighted Residual MethodsDocument17 pagesWeighted Residual MethodsYoosef NadireeNo ratings yet
- MOP Lec 3Document4 pagesMOP Lec 3Mohamed Gamal HassanNo ratings yet
- 2 Nonlinear Programming ModelsDocument27 pages2 Nonlinear Programming ModelsSumit SauravNo ratings yet
- Algorithms Midterm 2020Document6 pagesAlgorithms Midterm 2020Duc Anh QuanNo ratings yet
- Numerical Solution of Initial Value ProblemsDocument17 pagesNumerical Solution of Initial Value ProblemslambdaStudent_eplNo ratings yet
- Bài Tập Ước Lượng C12346Document55 pagesBài Tập Ước Lượng C12346Nguyễn Viết DươngNo ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- Pressure Control Trainer PiDocument2 pagesPressure Control Trainer PiSuman SamaiNo ratings yet
- Pressure Control Trainer p1Document4 pagesPressure Control Trainer p1Suman SamaiNo ratings yet
- Pressure Control TrainerpidDocument3 pagesPressure Control TrainerpidSuman SamaiNo ratings yet
- Pressure Control Trainer PDocument4 pagesPressure Control Trainer PSuman SamaiNo ratings yet
- Pressure Control Trainer PDDocument2 pagesPressure Control Trainer PDSuman SamaiNo ratings yet
- Pressure Control Experiment Data LogsDocument3 pagesPressure Control Experiment Data LogsSuman SamaiNo ratings yet
- Pressure Control Experiment Data LogDocument4 pagesPressure Control Experiment Data LogSuman SamaiNo ratings yet
- Pressure Control Trainer Pi 1Document2 pagesPressure Control Trainer Pi 1Suman SamaiNo ratings yet
- PHD - Comprehensive - Document 2021 08 25 1 03 AmDocument15 pagesPHD - Comprehensive - Document 2021 08 25 1 03 AmSuman SamaiNo ratings yet
- Chapter 4Document3 pagesChapter 4ashu070390No ratings yet
- Bms College of Engineering, Bengaluru-19. Department of Computer Science and EngineeringDocument6 pagesBms College of Engineering, Bengaluru-19. Department of Computer Science and EngineeringNitish BanakarNo ratings yet
- Introduction To Optimum Design 4th Edition Arora Solutions ManualDocument14 pagesIntroduction To Optimum Design 4th Edition Arora Solutions Manualmagnusceridwen66rml3100% (30)
- Definition of Double inDocument11 pagesDefinition of Double inLea LovatoNo ratings yet
- Ab Und AufzugDocument5 pagesAb Und AufzugelvagojpNo ratings yet
- EC8553 DTSP (Question Bank)Document13 pagesEC8553 DTSP (Question Bank)gopperumdeviNo ratings yet
- CS771 Introduction to Machine LearningDocument27 pagesCS771 Introduction to Machine LearningShanu TensionNo ratings yet
- Extended Essay AbstractDocument1 pageExtended Essay AbstractManav ShahNo ratings yet
- CS Answers - 2019-20 - SET1Document12 pagesCS Answers - 2019-20 - SET1-Uddipan BagchiNo ratings yet
- SliceDocument3 pagesSliceblahblahNo ratings yet
- 4-EED220 Lecture 4Document20 pages4-EED220 Lecture 4as0110967700No ratings yet
- Gaussian EliminationDocument6 pagesGaussian Eliminationsairin parkNo ratings yet
- An Assignment Problem Is A Particular Case of Transportation ProblemDocument7 pagesAn Assignment Problem Is A Particular Case of Transportation ProblemsunilsinghmNo ratings yet
- Problema producatorului si a consumatorului - Producator-consumer problemDocument20 pagesProblema producatorului si a consumatorului - Producator-consumer problemDmitrii NepiivodaNo ratings yet
- CH9 - Dynamic Programming and The Earley ParserDocument16 pagesCH9 - Dynamic Programming and The Earley ParserpbtaiNo ratings yet
- Machine Learning and Data Mining: Introduction to (Học máy và Khai phá dữ liệu)Document49 pagesMachine Learning and Data Mining: Introduction to (Học máy và Khai phá dữ liệu)Lộc SẹoNo ratings yet
- 85409Document110 pages85409arunNo ratings yet
- JU CD Lab ManualDocument26 pagesJU CD Lab ManualInbox 01No ratings yet
- Automata Theory IntroductionDocument73 pagesAutomata Theory IntroductionAyele MitkuNo ratings yet
- Handbook Unimelb Edu AuDocument3 pagesHandbook Unimelb Edu Auijigar007No ratings yet
- Solution: Final AnswerDocument9 pagesSolution: Final AnswerKaiNo ratings yet
- Optimum Design of Mechanical Elements: Class Notes For AME60661Document217 pagesOptimum Design of Mechanical Elements: Class Notes For AME60661CarlosDavidNo ratings yet
- Introduction To Management Science Quantitative Approach 15th Edition Anderson Solutions ManualDocument25 pagesIntroduction To Management Science Quantitative Approach 15th Edition Anderson Solutions ManualJohnGibsoneios100% (51)
- Week 4 Assignment 1Document3 pagesWeek 4 Assignment 1Lucky ManNo ratings yet
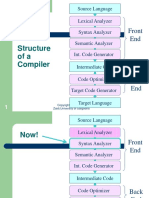
- Structure Ofa Compiler: Front EndDocument95 pagesStructure Ofa Compiler: Front EndHassan AliNo ratings yet
- NPTEL ML Assignment Week1Document5 pagesNPTEL ML Assignment Week1Prasannakumar S Asst.prof100% (2)
- Discrete Mathematics - Course OutlineDocument3 pagesDiscrete Mathematics - Course OutlineHassaan Sohail0% (1)
- Assignment # 3Document4 pagesAssignment # 3Shahzael MughalNo ratings yet
- Welcome To Problem Solving With Algorithms and Data StructuresDocument273 pagesWelcome To Problem Solving With Algorithms and Data Structuresg_teodorescuNo ratings yet
- DSC Cie-2Document2 pagesDSC Cie-2learn somethingNo ratings yet
- Data Structures and AlgorithmsDocument6 pagesData Structures and AlgorithmsGienel John Tinio DiazNo ratings yet