You might also like
- Lec 15Document23 pagesLec 15Kenneth LandichoNo ratings yet
- HW 5 SolDocument4 pagesHW 5 SolGonzalo SaavedraNo ratings yet
- 12장Document24 pages12장JUAN PABLO SANCHEZ ARROYAVENo ratings yet
- Parte 6Document7 pagesParte 6Elohim Ortiz CaballeroNo ratings yet
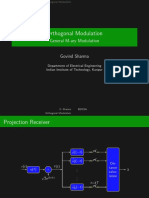
- DC19 Orthogonal ModulationDocument13 pagesDC19 Orthogonal ModulationMalkurthi SreekarNo ratings yet
- 2 The Zero-Order Hold and The DAC Model: 2.1 Transfer Function of The ZOHDocument4 pages2 The Zero-Order Hold and The DAC Model: 2.1 Transfer Function of The ZOHYassine DjillaliNo ratings yet
- Midterm SolutionsDocument9 pagesMidterm SolutionsJohnathan SandersonNo ratings yet
- ECE 301: Signals and Systems Homework Assignment #5: Professor: Aly El Gamal TA: Xianglun MaoDocument10 pagesECE 301: Signals and Systems Homework Assignment #5: Professor: Aly El Gamal TA: Xianglun MaosowNo ratings yet
- Assignment 1 SolutionDocument5 pagesAssignment 1 SolutionsamsNo ratings yet
- Matched FilterDocument2 pagesMatched Filter朱柏林No ratings yet
- Lec8h2 OptimalControl PDFDocument83 pagesLec8h2 OptimalControl PDFAnonymous WkbmWCa8MNo ratings yet
- Assignment 1-SolutionsDocument5 pagesAssignment 1-SolutionsKaveendra KumarNo ratings yet
- 5 StabilityDocument45 pages5 StabilityMd Nur-A-Adam DonyNo ratings yet
- One Dimensional ElementDocument51 pagesOne Dimensional ElementAbdullah RamziNo ratings yet
- Mathematical Modeling and Computation in FinanceDocument4 pagesMathematical Modeling and Computation in FinanceĐạo Ninh ViệtNo ratings yet
- ELEN3012 - 2020 Part 2Document7 pagesELEN3012 - 2020 Part 2Bongani MofokengNo ratings yet
- Finansmatte FSDocument1 pageFinansmatte FSGustav HägglundNo ratings yet
- EC331 M1 SolutionDocument2 pagesEC331 M1 SolutionBushra MamoudNo ratings yet
- Lecture Note About Non Harmonic MotionDocument6 pagesLecture Note About Non Harmonic MotionYasir LoneNo ratings yet
- TelegrphDocument4 pagesTelegrphimohammadghiyasiNo ratings yet
- 1.3.2 Application of PDE - HeatDocument10 pages1.3.2 Application of PDE - HeatCT MarNo ratings yet
- Solution To Exercises: A Breviary of Seismic TomographyDocument3 pagesSolution To Exercises: A Breviary of Seismic Tomographyrinzzz333No ratings yet
- Signals Approximation, 2 NfcietDocument7 pagesSignals Approximation, 2 Nfcietapi-19788618No ratings yet
- Notes On ExercisesDocument44 pagesNotes On ExercisesYokaNo ratings yet
- Damped Simple Harmonic Motion - Critical DampingDocument13 pagesDamped Simple Harmonic Motion - Critical DampingRohan MohataNo ratings yet
- PHYS 101 - General Physics-I, Final ExamDocument8 pagesPHYS 101 - General Physics-I, Final ExamhuuuzenNo ratings yet
- Formulario FTELDocument2 pagesFormulario FTELluccacontas01No ratings yet
- Mathematical Modeling and Computation in FinanceDocument4 pagesMathematical Modeling and Computation in FinanceĐạo Ninh ViệtNo ratings yet
- Disordered Superconductors: Green's Function MethodsDocument17 pagesDisordered Superconductors: Green's Function MethodsSayak BiswasNo ratings yet
- Moments and Tails of Hitting Times of Bessel Processes and Convolutions of Elementary Mixtures of Exponential DistributionsDocument24 pagesMoments and Tails of Hitting Times of Bessel Processes and Convolutions of Elementary Mixtures of Exponential DistributionsrafalNo ratings yet
- 1 The Black-Scholes Formula For A European Call or Put: 1.1 Evaluation of European OptionsDocument15 pages1 The Black-Scholes Formula For A European Call or Put: 1.1 Evaluation of European Optionshenry37302No ratings yet
- sns 2021 기말 (온라인)Document2 pagessns 2021 기말 (온라인)juyeons0204No ratings yet
- Indian Institute of Science: Problem 1Document4 pagesIndian Institute of Science: Problem 1ChandreshSinghNo ratings yet
- Wave Equation in 1D (Part 1)Document19 pagesWave Equation in 1D (Part 1)baraa AlkhaqaniNo ratings yet
- Sol 6Document5 pagesSol 6Luis ZambranoNo ratings yet
- MIT15 070JF13 Lec17 PDFDocument9 pagesMIT15 070JF13 Lec17 PDFnachersNo ratings yet
- 1 Example 2: Heat EquationDocument4 pages1 Example 2: Heat EquationsalmanNo ratings yet
- PHL BS With Affine DivsDocument8 pagesPHL BS With Affine DivsRaphaël FromEverNo ratings yet
- AnisotropicAcousticPP PDFDocument16 pagesAnisotropicAcousticPP PDFAdexa PutraNo ratings yet
- Hamiltonian Mechanics Unter Besonderer Ber Ucksichtigung Der H Oheren LehranstaltenDocument6 pagesHamiltonian Mechanics Unter Besonderer Ber Ucksichtigung Der H Oheren LehranstaltenvelayyaNo ratings yet
- 36-708 Statistical Methods For Machine Learning Homework #1 SolutionsDocument12 pages36-708 Statistical Methods For Machine Learning Homework #1 SolutionsSNo ratings yet
- Appendix A:: Conservation of Mechanical Energy Conservation of Linear MomentumDocument5 pagesAppendix A:: Conservation of Mechanical Energy Conservation of Linear MomentumOliver KrausNo ratings yet
- CH 12 PDFDocument31 pagesCH 12 PDFKELOMPOK 1 ANGKATAN 129No ratings yet
- Problem Set 9 Solutions: Problem 1: Griffiths Problem 8.12 (P. 362)Document6 pagesProblem Set 9 Solutions: Problem 1: Griffiths Problem 8.12 (P. 362)EniNo ratings yet
- Nonlinear Systems and Control Lecture # 19 Perturbed Systems & Input-to-State StabilityDocument18 pagesNonlinear Systems and Control Lecture # 19 Perturbed Systems & Input-to-State Stabilitywin alfalahNo ratings yet
- Nonlinear Systems and Control Lecture # 19 Perturbed Systems & Input-to-State StabilityDocument18 pagesNonlinear Systems and Control Lecture # 19 Perturbed Systems & Input-to-State Stabilitywin alfalahNo ratings yet
- Ex4 22Document3 pagesEx4 22Harsh RajNo ratings yet
- Rutgers: 332:322 Principles of Communications Systems Spring 2004Document8 pagesRutgers: 332:322 Principles of Communications Systems Spring 2004srattovNo ratings yet
- Problem Solutions For Chapter 7: j2 FT j2 FTDocument18 pagesProblem Solutions For Chapter 7: j2 FT j2 FTapi-19870706No ratings yet
- Winter 2012 Math 255Document11 pagesWinter 2012 Math 255JiyuNo ratings yet
- X N N F (N)Document6 pagesX N N F (N)mtheoroNo ratings yet
- Midterm CheatsheetDocument3 pagesMidterm CheatsheetJoel Tan Yi JieNo ratings yet
- Mechatronics Lab ME 140L Introduction To Control Systems: I. Lecture 2: Transfer Functions, EigenvaluesDocument13 pagesMechatronics Lab ME 140L Introduction To Control Systems: I. Lecture 2: Transfer Functions, EigenvaluesGrant GeorgiaNo ratings yet
- Exponential Decay of Solutions of A Nonlinearly Damped Wave Equation - Abbes BENAISSADocument9 pagesExponential Decay of Solutions of A Nonlinearly Damped Wave Equation - Abbes BENAISSAJefferson Johannes Roth FilhoNo ratings yet
- Slides-Teóricas-CDIG - SDA - Ver 3Document37 pagesSlides-Teóricas-CDIG - SDA - Ver 3Ddnunodd NndanielnnNo ratings yet
- Mathematical Modeling and Computation in FinanceDocument3 pagesMathematical Modeling and Computation in FinanceĐạo Ninh ViệtNo ratings yet
- Abhishek 3 - Asset Id 1928771Document5 pagesAbhishek 3 - Asset Id 1928771Abhishek SinghNo ratings yet
- Curves hw1Document2 pagesCurves hw1Anirudh NairNo ratings yet
- P Q y T X T P y Q X y T: Visit Us At: WWW - Nodia.co - inDocument2 pagesP Q y T X T P y Q X y T: Visit Us At: WWW - Nodia.co - inSameerChauhanNo ratings yet
- The Cal H 2 Control Problem For Quadratically Invariant Systems With DelaysDocument6 pagesThe Cal H 2 Control Problem For Quadratically Invariant Systems With DelaysAli AzanNo ratings yet
- 2016 NapsDocument5 pages2016 NapsAli AzanNo ratings yet
- Public Health and Project Management: Do Projects Deliver?Document11 pagesPublic Health and Project Management: Do Projects Deliver?Ali AzanNo ratings yet
- 6 LQ, LQG, H, H Control System Design: 6.1 LQ: Linear Systems With Quadratic Performance Cri-TeriaDocument22 pages6 LQ, LQG, H, H Control System Design: 6.1 LQ: Linear Systems With Quadratic Performance Cri-TeriaAli AzanNo ratings yet
- Project Management: A Systems Approach To Planning, Scheduling, and Controlling Twelfth EditionDocument61 pagesProject Management: A Systems Approach To Planning, Scheduling, and Controlling Twelfth EditionAli AzanNo ratings yet
- 05b StateFeedback H2Document38 pages05b StateFeedback H2Ali AzanNo ratings yet
- 1990 802 12 PotterDocument124 pages1990 802 12 PotterAli AzanNo ratings yet
- Optimization of CCGT Power Plant and Performance Analysis Using MATLAB/Simulink With Actual Operational DataDocument10 pagesOptimization of CCGT Power Plant and Performance Analysis Using MATLAB/Simulink With Actual Operational DataAli AzanNo ratings yet
- 6170 Chernobyl RPDocument89 pages6170 Chernobyl RPAli AzanNo ratings yet
- Gas Turbine Modeling For Load-Frequency Control: January 2008Document9 pagesGas Turbine Modeling For Load-Frequency Control: January 2008Ali AzanNo ratings yet
- Clamav To Yara - PyDocument4 pagesClamav To Yara - PyAli AzanNo ratings yet
- Mpls l3vpn On Huawei Routers PDFDocument9 pagesMpls l3vpn On Huawei Routers PDFAli AzanNo ratings yet
- Approved Latest MS Ph.D. Courses For FBGS-16Document14 pagesApproved Latest MS Ph.D. Courses For FBGS-16Ali AzanNo ratings yet
- VNX5300 Reporting To Syslog Server: Dec 4, 2012 5:22 AMDocument1 pageVNX5300 Reporting To Syslog Server: Dec 4, 2012 5:22 AMAli AzanNo ratings yet
- BSC (Hons) HNDDocument2 pagesBSC (Hons) HNDAli AzanNo ratings yet
- C++ Examples - Cumulative Normal Distribution FunctionDocument7 pagesC++ Examples - Cumulative Normal Distribution FunctionAli AzanNo ratings yet
- LevinDocument6 pagesLevinRavikumaar RayalaNo ratings yet
- Hysys Rto RefguideDocument154 pagesHysys Rto RefguideMohanad Magdy SaidNo ratings yet
- Course Title-Computer Security COURSE CODE-cosc4171: Group AssignmentDocument4 pagesCourse Title-Computer Security COURSE CODE-cosc4171: Group AssignmentYohannes Busho100% (1)
- Journal of Statistical Software: Presiduals: An R Package For Residual AnalysisDocument27 pagesJournal of Statistical Software: Presiduals: An R Package For Residual AnalysisRomualdoNo ratings yet
- 1 Introduction and Background To The FEM: 1.1 Weighted Residual MethodsDocument30 pages1 Introduction and Background To The FEM: 1.1 Weighted Residual MethodsAbel LemaNo ratings yet
- Z04 Rend6289 10 Im Mod4Document3 pagesZ04 Rend6289 10 Im Mod4José Manuel Orduño VillaNo ratings yet
- Conceptos Básicos de Optimización v2Document31 pagesConceptos Básicos de Optimización v2Andres Milquez100% (1)
- Automation KivaDocument25 pagesAutomation KivaAnirudh KowthaNo ratings yet
- Encryption Using Lester Hill Cipher Algorithm: Thangarasu.N DR - Arul Lawrence SelvakumarDocument5 pagesEncryption Using Lester Hill Cipher Algorithm: Thangarasu.N DR - Arul Lawrence SelvakumarEhsan GhasisinNo ratings yet
- Interview PDFDocument100 pagesInterview PDFDespicable ProgrammerNo ratings yet
- Urban Landuse and Transportation Planning: NptelDocument21 pagesUrban Landuse and Transportation Planning: NptelDivyaa PrabuNo ratings yet
- Topcs UL Power Control OptimizationDocument14 pagesTopcs UL Power Control OptimizationmofkawassNo ratings yet
- Assignment 3 PDFDocument5 pagesAssignment 3 PDFanon_929121264No ratings yet
- OS05Document32 pagesOS05Asghar Khattak FDCPNo ratings yet
- Assignment-2 SolutionDocument17 pagesAssignment-2 SolutionAbhinav RawatNo ratings yet
- JavaScript AlgorithmsDocument292 pagesJavaScript Algorithmskevin91% (11)
- Dynamic Classifier SelectionDocument22 pagesDynamic Classifier SelectionYusuf YeşilyurtNo ratings yet
- 19Ma2Icmat Module 5 - Elementary Numerical MethodsDocument4 pages19Ma2Icmat Module 5 - Elementary Numerical Methods1DS19CH011 Jashwanth C RNo ratings yet
- Resensi Big Data, Data Mining, and Machine Learning "Bahasa Inggris"Document2 pagesResensi Big Data, Data Mining, and Machine Learning "Bahasa Inggris"Rolansyah TrisaktiNo ratings yet
- Assembly Line SchedulingDocument25 pagesAssembly Line Schedulingapi-19981779No ratings yet
- Slide 11 - Anomaly Detection PDFDocument31 pagesSlide 11 - Anomaly Detection PDFLôny NêzNo ratings yet
- IND E 513 Introduction To Linear Optimization (University of Washington)Document2 pagesIND E 513 Introduction To Linear Optimization (University of Washington)Jerome WongNo ratings yet
- MBO Queue ManagementDocument20 pagesMBO Queue ManagementGeorge WillisNo ratings yet
- Stabilization of Aircraft StructureDocument10 pagesStabilization of Aircraft StructureJanuva K JNo ratings yet
- Wei, Ramanathan, Cappellaro - Exploring Localization in Nuclear Spin ChainsDocument6 pagesWei, Ramanathan, Cappellaro - Exploring Localization in Nuclear Spin ChainsMarisa UlfaNo ratings yet
- Stilson-Smith - Alias-Free Digital Synthesis of Classic Analog Waveforms (BLIT)Document12 pagesStilson-Smith - Alias-Free Digital Synthesis of Classic Analog Waveforms (BLIT)HangTheBankersNo ratings yet
- Chapter - Iii Linear Algebraic Equations: X X X XDocument13 pagesChapter - Iii Linear Algebraic Equations: X X X XTesfayeNo ratings yet
- Jim DSA QuestionsDocument26 pagesJim DSA QuestionsTudor CiotloșNo ratings yet
- Humms 125 SQDocument9 pagesHumms 125 SQAki GarridoNo ratings yet
- PID TuningDocument37 pagesPID TuningSuresh kannanNo ratings yet