You might also like
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.From EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.No ratings yet
- FBs Brochure 2008Document27 pagesFBs Brochure 2008Nasr AlabdaliNo ratings yet
- MVI69 MCM DatasheetDocument3 pagesMVI69 MCM DatasheetdroncanciomNo ratings yet
- System On ModuleDocument21 pagesSystem On ModulesrisairampolyNo ratings yet
- FATEK enDocument28 pagesFATEK enLe Professionist100% (1)
- Basic ARM9 Block DiagramDocument2 pagesBasic ARM9 Block Diagramhumtum_shriNo ratings yet
- EE16704 UNIT5 ProfibusDocument29 pagesEE16704 UNIT5 ProfibusthamizmaniNo ratings yet
- Mplab 1Document75 pagesMplab 1lingalashanthipriya_No ratings yet
- D Module c6713Document11 pagesD Module c6713cristian_chituNo ratings yet
- Series: Programmable Logic ControllerDocument28 pagesSeries: Programmable Logic ControllerhegonmilesNo ratings yet
- Brodersen Powerful Controller Compact RTU32Document2 pagesBrodersen Powerful Controller Compact RTU32Ehsan RohaniNo ratings yet
- pLINES Datasheet FP V2.22Document2 pagespLINES Datasheet FP V2.22TrinhDinhLoc0% (1)
- Applicom ProfibusDocument4 pagesApplicom Profibustaras_martinNo ratings yet
- Comunicaciones UnitronicsDocument47 pagesComunicaciones UnitronicsUcayaliAlDiaNo ratings yet
- Automation Unit - 5Document23 pagesAutomation Unit - 5Uday Can CanNo ratings yet
- Difference Between MODBUS and PROFIBUSDocument7 pagesDifference Between MODBUS and PROFIBUSelishaNo ratings yet
- Advantech Protocol Bundle SolutionsDocument5 pagesAdvantech Protocol Bundle SolutionsBiswjit DeyNo ratings yet
- Profibus: Actuator ControlDocument8 pagesProfibus: Actuator ControlMrSarvan100% (1)
- Reference Material For EXP - 1Document26 pagesReference Material For EXP - 1Jatin YadavNo ratings yet
- Adam5510m DsamcDocument2 pagesAdam5510m DsamcPhạm Ngọc HòaNo ratings yet
- DS1006-ProcessorBoard dSPACE Catalog 2009Document6 pagesDS1006-ProcessorBoard dSPACE Catalog 2009subashishNo ratings yet
- CIF - Communication Interface: PC Cards As Fieldbus InterfaceDocument4 pagesCIF - Communication Interface: PC Cards As Fieldbus InterfaceZafar AwanNo ratings yet
- SuperNode Programmable Controller For Connectivity SolutionsDocument12 pagesSuperNode Programmable Controller For Connectivity Solutionsmf7838No ratings yet
- Modbus Vs ProfibusDocument7 pagesModbus Vs ProfibusYumna JelitaNo ratings yet
- 26 366 Ti pcd4 En3 PDFDocument24 pages26 366 Ti pcd4 En3 PDFFadFadNo ratings yet
- QUATECH DSP-200/300 Quatech Serial PCMCIA Card, 2 Port RS-422/485Document1 pageQUATECH DSP-200/300 Quatech Serial PCMCIA Card, 2 Port RS-422/485Edwin F Marcano MNo ratings yet
- DCS Practical 6Document10 pagesDCS Practical 6Vj NadarNo ratings yet
- ModBerry 500 - Industrial Computer based on Raspberry PiDocument6 pagesModBerry 500 - Industrial Computer based on Raspberry PiSebastian Rodrigo Contreras GamboaNo ratings yet
- Chapter 4Document6 pagesChapter 4Lloyd RevesNo ratings yet
- C-Dot Max-XlDocument39 pagesC-Dot Max-XlGourav Roy100% (3)
- Interfacecomponent SiemensDocument16 pagesInterfacecomponent Siemenssteam100deg1658No ratings yet
- 9 Simatic s5 Catalog St50 enDocument500 pages9 Simatic s5 Catalog St50 enНикола КаришикNo ratings yet
- Honeywell Acm 72Document8 pagesHoneywell Acm 72Delbert RicardoNo ratings yet
- Hardware Design ConsiderationDocument6 pagesHardware Design ConsiderationWelington OliveiraNo ratings yet
- Chap - 2 SLC & Micro Logic PLC FamilyDocument8 pagesChap - 2 SLC & Micro Logic PLC FamilyMandarinuiNo ratings yet
- OPC Is A Software Interface StandardDocument6 pagesOPC Is A Software Interface Standarditsurturn000No ratings yet
- Advanced Power Technology and Services J.S.C. Advanced Power Technology and Services J.S.CDocument10 pagesAdvanced Power Technology and Services J.S.C. Advanced Power Technology and Services J.S.CQuang NgocNo ratings yet
- Atca 6101Document3 pagesAtca 6101Karanja SamNo ratings yet
- TheMaintGuide FieldcommDocument7 pagesTheMaintGuide Fieldcommaromero888No ratings yet
- Scout 8-26-10Document2 pagesScout 8-26-10Jed TedorNo ratings yet
- PC-ALE User Guide v1.08Document77 pagesPC-ALE User Guide v1.08Jorge Felippe A. CostaNo ratings yet
- 1 Fixed-Point Digital Signal ProcessorDocument159 pages1 Fixed-Point Digital Signal ProcessorNikunj PatelNo ratings yet
- Profibus ABCDocument9 pagesProfibus ABCBrf RFNo ratings yet
- Class: T.E. E &TC Subject: DSP Expt. No.: Date: Title: Implementation of Convolution Using DSP Processor ObjectiveDocument9 pagesClass: T.E. E &TC Subject: DSP Expt. No.: Date: Title: Implementation of Convolution Using DSP Processor ObjectiveMahadevNo ratings yet
- Prosoft MVI56E-MCMRDocument3 pagesProsoft MVI56E-MCMRiedmondNo ratings yet
- Catalog MasterLogic-200 Eng R02Document46 pagesCatalog MasterLogic-200 Eng R02Marky SpicerNo ratings yet
- MASTER THESIS Interim ReportDocument11 pagesMASTER THESIS Interim ReportVmv SairamNo ratings yet
- ADSP-21065L DSP Microcomputer: Jtag Dual-Ported Sram Core ProcessorDocument44 pagesADSP-21065L DSP Microcomputer: Jtag Dual-Ported Sram Core ProcessorsruharithaNo ratings yet
- 1154 DatasheetDocument3 pages1154 DatasheetjagdishsimariyaNo ratings yet
- Modbus ProtocolDocument67 pagesModbus ProtocolVaibhav Tripathi100% (3)
- Siemens Profibus 1Document34 pagesSiemens Profibus 1Miguel AngelNo ratings yet
- Control The Future Today With Allen-Bradley's SLC 500™ Processors: Small Controllers For Big ApplicationsDocument6 pagesControl The Future Today With Allen-Bradley's SLC 500™ Processors: Small Controllers For Big Applicationsrahul_jagdev883914No ratings yet
- Communication Gateway COM 500: Product GuideDocument6 pagesCommunication Gateway COM 500: Product GuideSocaciu VioricaNo ratings yet
- Gwy 300Document5 pagesGwy 300Maitry ShahNo ratings yet
- Serial - Ethernet ModuleDocument22 pagesSerial - Ethernet ModuleJAC 91No ratings yet
- 4-slot and 8-slot PC-based Controllers with EthernetDocument2 pages4-slot and 8-slot PC-based Controllers with EthernetPhạm Ngọc HòaNo ratings yet
- Computer Organization and Design: The Hardware / Software InterfaceFrom EverandComputer Organization and Design: The Hardware / Software InterfaceRating: 4 out of 5 stars4/5 (12)
- Serial Port Complete: COM Ports, USB Virtual COM Ports, and Ports for Embedded SystemsFrom EverandSerial Port Complete: COM Ports, USB Virtual COM Ports, and Ports for Embedded SystemsRating: 3.5 out of 5 stars3.5/5 (9)
- Embedded Systems Design with Platform FPGAs: Principles and PracticesFrom EverandEmbedded Systems Design with Platform FPGAs: Principles and PracticesRating: 5 out of 5 stars5/5 (1)
- 15-Heat Stress PlanDocument2 pages15-Heat Stress PlanKhan MuhammadNo ratings yet
- Shell Script File OperationsDocument4 pagesShell Script File OperationswendxneozyNo ratings yet
- XPON POE ONT V2820D 1G3FPS Datasheet V2.0 ENDocument2 pagesXPON POE ONT V2820D 1G3FPS Datasheet V2.0 ENDamian RattalinoNo ratings yet
- TLE-ICT-CSS 10-Q1 - ICCS Week 1Document17 pagesTLE-ICT-CSS 10-Q1 - ICCS Week 1jayson santosNo ratings yet
- Unit 4 Eureka PDFDocument25 pagesUnit 4 Eureka PDFAli BedarniaNo ratings yet
- Raspberry Pi Networking Cookbook - Second Edition - Sample ChapterDocument55 pagesRaspberry Pi Networking Cookbook - Second Edition - Sample ChapterPackt PublishingNo ratings yet
- Tesks List EksportDocument19 pagesTesks List EksportcvyunaallexamedikaNo ratings yet
- Hauff ManDocument11 pagesHauff ManMohammad IsmailNo ratings yet
- Print Configuration Guide - CorelDRAWDocument8 pagesPrint Configuration Guide - CorelDRAWIwanshareNo ratings yet
- HyacinthDocument12 pagesHyacinthearl9rivera-830280No ratings yet
- Allegro Current Sensor Ltspice ModelsDocument11 pagesAllegro Current Sensor Ltspice ModelshajaNo ratings yet
- Gis Report BayerDocument12 pagesGis Report BayerKALYANI CHUNCHUNo ratings yet
- Siemens SIMATIC Step 7 Programmer's HandbookDocument58 pagesSiemens SIMATIC Step 7 Programmer's Handbooklemoresk100% (1)
- Uhpc 9628 EkenelDocument10 pagesUhpc 9628 EkenelM. Murat ErginNo ratings yet
- Virtual & Augmented Reality Use Cases For Fusion Design EngineeringDocument4 pagesVirtual & Augmented Reality Use Cases For Fusion Design EngineeringXto PeregrinNo ratings yet
- Automatic Street Light ControlDocument21 pagesAutomatic Street Light Controlakash mishraNo ratings yet
- Social Media MarketingDocument6 pagesSocial Media MarketingLakshayNo ratings yet
- Attach-2 Triconex Technical Product Guide-CompressedDocument39 pagesAttach-2 Triconex Technical Product Guide-Compressedivan_sofyan_aNo ratings yet
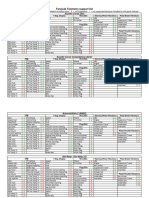
- FanaLab Telemetry Support ListDocument8 pagesFanaLab Telemetry Support ListRidasNo ratings yet
- Prso KM S - : Durgapur Public SchoolDocument2 pagesPrso KM S - : Durgapur Public SchoolPrasoon Singh RajputNo ratings yet
- Cyber Security Challenges - How To Deal With ItDocument54 pagesCyber Security Challenges - How To Deal With ItLawrence LauNo ratings yet
- Frontend Developer Career Objectives and ExperienceDocument1 pageFrontend Developer Career Objectives and Experiencesetiawan wawanNo ratings yet
- WF-500 DatasheetDocument2 pagesWF-500 DatasheetNhat Tan MaiNo ratings yet
- OneOcean Regs4ships Leaflet 2022 210x297mmDocument3 pagesOneOcean Regs4ships Leaflet 2022 210x297mmPetrica NeculaNo ratings yet
- Government Polytechnic, Arvi: Department of Civil EngineeringDocument9 pagesGovernment Polytechnic, Arvi: Department of Civil Engineering39 - Deep MandokarNo ratings yet
- Quality Characteristics of Functional and Non Functional TestingDocument74 pagesQuality Characteristics of Functional and Non Functional TestinggoshoNo ratings yet
- Project Report - Online Movie Ticket Booking (Final)Document76 pagesProject Report - Online Movie Ticket Booking (Final)OmkarNo ratings yet
- IMS ManualDocument66 pagesIMS Manualghafoorian_khoshgovar1488No ratings yet
- Latihan Soal (Revisi)Document5 pagesLatihan Soal (Revisi)Wera GogonNo ratings yet
- Fuel Injector Cleaner: Form No. 107340Document4 pagesFuel Injector Cleaner: Form No. 107340Leandro Nikko ReintarNo ratings yet