You might also like
- Networking BasicsDocument222 pagesNetworking Basicsceren_can_6No ratings yet
- Ekinex® Price List (APRIL 2019)Document7 pagesEkinex® Price List (APRIL 2019)Federico Ungureanu100% (1)
- TNBWDocument331 pagesTNBWSavoyNo ratings yet
- Network ArchitectureDocument24 pagesNetwork ArchitectureMarilyn LowNo ratings yet
- KNX - MyKNXDocument5 pagesKNX - MyKNXCiprian VarlanNo ratings yet
- 06 CouplersDocument21 pages06 CouplersbehroozNo ratings yet
- KNX - CommunicationDocument25 pagesKNX - CommunicationEdouard BurnNo ratings yet
- Johnson Controls Metasys System BRDocument31 pagesJohnson Controls Metasys System BRisraelNo ratings yet
- KNX Partner: Training CourseDocument14 pagesKNX Partner: Training CourseNawelNo ratings yet
- Kursus Pengenalan Kepada Sistem Automasi Bangunan (KNX System)Document69 pagesKursus Pengenalan Kepada Sistem Automasi Bangunan (KNX System)Fadhilatullaili AbdullahNo ratings yet
- KNX-basic Course FullDocument261 pagesKNX-basic Course Fullluis90000083% (6)
- 2 KNX Project Design GuidelinesDocument17 pages2 KNX Project Design GuidelinesEmil EremiaNo ratings yet
- KNX Project Design GuidelinesDocument16 pagesKNX Project Design GuidelinesmicaNo ratings yet
- KNX Fancoil Controller PDFDocument58 pagesKNX Fancoil Controller PDFlfrn20044593No ratings yet
- Lez10a KNX Architecture v3.0Document26 pagesLez10a KNX Architecture v3.0Tiago GoncalvesNo ratings yet
- Basic Course UKDocument22 pagesBasic Course UKMubaraque Moosa0% (1)
- 03.topology EN0419bDocument26 pages03.topology EN0419bIrina TiNo ratings yet
- KNX Automation System ManualDocument59 pagesKNX Automation System ManualAnonymous zZWZsjWPNo ratings yet
- Home AutomationDocument300 pagesHome AutomationRamomNo ratings yet
- KNX System Design GuideDocument28 pagesKNX System Design GuideSameer C Musthafa100% (2)
- #01 KNX ArchitectureDocument35 pages#01 KNX ArchitectureMircea Remus AndoneNo ratings yet
- Energy Efficiency Solutions For BuildingsDocument51 pagesEnergy Efficiency Solutions For Buildingsdimaomar100% (1)
- 104 - System OverviewDocument27 pages104 - System OverviewMurali VarathanNo ratings yet
- System Overview EN0223bDocument28 pagesSystem Overview EN0223bliam.weissNo ratings yet
- Topology E1212cDocument22 pagesTopology E1212cdarknezNo ratings yet
- 2020 en MNGMNT Standardization StatusDocument2 pages2020 en MNGMNT Standardization StatusAhmet Eren SancakNo ratings yet
- Topology EN0223aDocument34 pagesTopology EN0223aliam.weissNo ratings yet
- Interpretation and Emulation For TelegramDocument5 pagesInterpretation and Emulation For TelegramdanyNo ratings yet
- Topology KNX TLDocument27 pagesTopology KNX TLQiyamul LailNo ratings yet
- Cool KNX GuidelinesDocument12 pagesCool KNX Guidelineselan.ks786No ratings yet
- Bus Devices - EN0419aDocument14 pagesBus Devices - EN0419arobertduvallNo ratings yet
- 03 - 01 - 02 Glossary v01.04.00 ASDocument23 pages03 - 01 - 02 Glossary v01.04.00 ASGentritNo ratings yet
- TelegramDocument11 pagesTelegramDiamond SalehNo ratings yet
- 01.system Arguments - EN0419aDocument14 pages01.system Arguments - EN0419aNicu PuscasNo ratings yet
- TCGB0055 r0 10-08 SCREENDocument36 pagesTCGB0055 r0 10-08 SCREENRobertoAraujoNo ratings yet
- CT - Serie Chorus Building Automation - Rev2.0 - enDocument61 pagesCT - Serie Chorus Building Automation - Rev2.0 - enDigital XlescuNo ratings yet
- Bus Devices - EN1220bDocument16 pagesBus Devices - EN1220bliam.weissNo ratings yet
- 06m11 Outline of MPXDocument10 pages06m11 Outline of MPXJoelNo ratings yet
- Symmetry 12 00837Document15 pagesSymmetry 12 00837kfNo ratings yet
- 1 PBDocument8 pages1 PBChristofer PalaciosNo ratings yet
- KNX ThesisDocument4 pagesKNX Thesisangelaweberolathe100% (2)
- TopologyDocument33 pagesTopologyMohamed Riyad BoudallaaNo ratings yet
- Manual KES Plus EN v1 4 ADocument46 pagesManual KES Plus EN v1 4 AMurali VarathanNo ratings yet
- IEC20 206185020 20Substation20Automation20based20on20IECDocument7 pagesIEC20 206185020 20Substation20Automation20based20on20IECGustavo CasabonaNo ratings yet
- 01 Joost Demarest - KNX AssociationDocument24 pages01 Joost Demarest - KNX AssociationSocaciu VioricaNo ratings yet
- Efficient Algorithms For Maximizing Lifetime in Wireless Sensor NetworksDocument6 pagesEfficient Algorithms For Maximizing Lifetime in Wireless Sensor NetworkserpublicationNo ratings yet
- ElettraSuite ADAPT-IP BS Node EN LRDocument8 pagesElettraSuite ADAPT-IP BS Node EN LRMo2yed - TechNo ratings yet
- Computers and Mathematics With Applications: Imre I. Lendak Aleksandar M. Erdeljan Dragan S. PopovićDocument7 pagesComputers and Mathematics With Applications: Imre I. Lendak Aleksandar M. Erdeljan Dragan S. PopovićpeterNo ratings yet
- Manual KNX-IP Interface EN v1.1 ADocument16 pagesManual KNX-IP Interface EN v1.1 AMeNo ratings yet
- Cdot An-RaxDocument46 pagesCdot An-Raxneeraj kumar singh100% (2)
- Measuring Performance of Wireless Communication SystemsDocument12 pagesMeasuring Performance of Wireless Communication Systemsrafacien.rcNo ratings yet
- Network of Enterprise Sub-NetworksDocument12 pagesNetwork of Enterprise Sub-NetworksAriel BecerraNo ratings yet
- Design of A Highly Integrated ReceiverDocument8 pagesDesign of A Highly Integrated ReceiverArun KumarNo ratings yet
- Modeling Simulation of Transmitter-Receiver System Using Vhdl-AmsDocument10 pagesModeling Simulation of Transmitter-Receiver System Using Vhdl-Amssyed MuzammilNo ratings yet
- 1702it304 Computer Organization and Architecture - QBDocument4 pages1702it304 Computer Organization and Architecture - QBamuthakarNo ratings yet
- Wire Antenna Modelling With NEC-2Document10 pagesWire Antenna Modelling With NEC-2Raden Adhi Ramdhani MegantaraNo ratings yet
- System ComponentsDocument11 pagesSystem ComponentsAnonymous U4PV5A0No ratings yet
- Design of Enhanced Differential Chaos Shift Keying Scheme: Nizar N. Al-BassamDocument4 pagesDesign of Enhanced Differential Chaos Shift Keying Scheme: Nizar N. Al-BassamDr-Raghad Al-FahamNo ratings yet
- Design and Operation of Energy-Aware Wireless Sensor Networks Through Scheduling and RoutingDocument3 pagesDesign and Operation of Energy-Aware Wireless Sensor Networks Through Scheduling and RoutingInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Study and Analysis of High Performance Xnor Based 1-Bit Full Adder CellDocument5 pagesStudy and Analysis of High Performance Xnor Based 1-Bit Full Adder CellInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- Freescale XECLCDWP mx515Document10 pagesFreescale XECLCDWP mx515ABHISHEK KEDARNo ratings yet
- EvalkitstknxDocument5 pagesEvalkitstknxPhạm ThànhNo ratings yet
- AMD ZenDocument3 pagesAMD ZenkbrinaldiNo ratings yet
- Next-Generation switching OS configuration and management: Troubleshooting NX-OS in Enterprise EnvironmentsFrom EverandNext-Generation switching OS configuration and management: Troubleshooting NX-OS in Enterprise EnvironmentsNo ratings yet
- EG180ST00 02e PSL Photovoltaics 04 - 04Document6 pagesEG180ST00 02e PSL Photovoltaics 04 - 04Nicu PuscasNo ratings yet
- NoxliteDocument4 pagesNoxliteNicu PuscasNo ratings yet
- Iluminat Panica PDF - PrevDocument3 pagesIluminat Panica PDF - PrevNicu PuscasNo ratings yet
- 06.installation E1213eDocument28 pages06.installation E1213eNicu PuscasNo ratings yet
- 03.topology EN0419bDocument26 pages03.topology EN0419bNicu PuscasNo ratings yet
- 01.system Arguments - EN0419aDocument14 pages01.system Arguments - EN0419aNicu PuscasNo ratings yet
- HD K-BUS Home & Buildind Automation Catalog 2014 PDFDocument20 pagesHD K-BUS Home & Buildind Automation Catalog 2014 PDFlfrn20044593No ratings yet
- Aycontrol Editor Manual 1.6.1Document86 pagesAycontrol Editor Manual 1.6.1Antonio JambrešićNo ratings yet
- Intesisbox: Interface KNX For Hitachi Air-To-WaterDocument4 pagesIntesisbox: Interface KNX For Hitachi Air-To-WaternajibNo ratings yet
- Schneider Electric Didactic Catalog 2013Document164 pagesSchneider Electric Didactic Catalog 2013Jagdish RajanNo ratings yet
- KNX Project Design ETS4 - BasicDocument41 pagesKNX Project Design ETS4 - BasicyakovNo ratings yet
- Connected: Experience The Magic of A HomeDocument25 pagesConnected: Experience The Magic of A HomeAbhay WadsingeNo ratings yet
- UnitronUC32 Building Management System ArchitectureDocument1 pageUnitronUC32 Building Management System ArchitectureAnonymous XYAPaxjbYNo ratings yet
- Greentec Company Profile V 3.2 PDFDocument46 pagesGreentec Company Profile V 3.2 PDFxolilevNo ratings yet
- Datasheet - BO04A01KNX - ENG - ITADocument2 pagesDatasheet - BO04A01KNX - ENG - ITAVishal SuryawaniNo ratings yet
- KNX IP - Using - IP - Networks - As - KNX - MediumDocument12 pagesKNX IP - Using - IP - Networks - As - KNX - MediumMeNo ratings yet
- NAE35-NAE45 Installation GuideDocument28 pagesNAE35-NAE45 Installation GuideĐăng LêNo ratings yet
- Loytec Katalog en WebDocument144 pagesLoytec Katalog en WebdiogenesbaNo ratings yet
- Datasheet-LGATE 952Document3 pagesDatasheet-LGATE 952josephNo ratings yet
- Universal Dimmer N554D31 - Siemens GammaDocument15 pagesUniversal Dimmer N554D31 - Siemens Gammanebojsa bohorNo ratings yet
- Intesis Software BACnet Products CatalogDocument15 pagesIntesis Software BACnet Products CatalogMark Izsm AmersonNo ratings yet
- Electron Sa Dimmers 2010-2011Document30 pagesElectron Sa Dimmers 2010-2011Don marioNo ratings yet
- Third Party DriversDocument10 pagesThird Party DriversAgustin Yancarlos Garcia M.No ratings yet
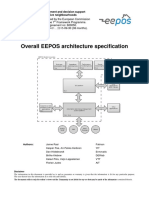
- Overall EEPOS Architecture SpecificationDocument38 pagesOverall EEPOS Architecture Specificationerkan islamovicNo ratings yet
- Im PDC 360i 8 12 Mini KNX GB 1110Document13 pagesIm PDC 360i 8 12 Mini KNX GB 1110Alex KnezNo ratings yet
- BMA 3622-MCG-01-0101-enDocument3 pagesBMA 3622-MCG-01-0101-enjujonetNo ratings yet
- KNX Journal 2016 enDocument77 pagesKNX Journal 2016 enAyman SaberNo ratings yet
- NAE Commissioning Guide: LIT-1201519 Release 9.0.7 and Release 10.0 Building Technologies & Solutions 2018-12-17Document152 pagesNAE Commissioning Guide: LIT-1201519 Release 9.0.7 and Release 10.0 Building Technologies & Solutions 2018-12-17Ryn YahuFNo ratings yet