You might also like
- Introduction To Rstudio: Creating VectorsDocument11 pagesIntroduction To Rstudio: Creating VectorsMandeep SinghNo ratings yet
- A-level Maths Revision: Cheeky Revision ShortcutsFrom EverandA-level Maths Revision: Cheeky Revision ShortcutsRating: 3.5 out of 5 stars3.5/5 (8)
- DSP MATLAB AssignmentsDocument134 pagesDSP MATLAB AssignmentsAkshansh ChaudharyNo ratings yet
- Ch5 5 Data PreprocessingDocument39 pagesCh5 5 Data Preprocessingll Y4ZEED llNo ratings yet
- Stanford University CS 229, Autumn 2014 Midterm ExaminationDocument23 pagesStanford University CS 229, Autumn 2014 Midterm ExaminationErico ArchetiNo ratings yet
- Midterm 2014Document23 pagesMidterm 2014Zeeshan Ali SayyedNo ratings yet
- Chapter 5Document21 pagesChapter 5ashytendaiNo ratings yet
- Chapter 5Document37 pagesChapter 5Muhammd AzeemNo ratings yet
- Variation AlDocument25 pagesVariation AlshomitbNo ratings yet
- Regression Modelling and Least-Squares: GSA Short Course: Session 1 RegressionDocument6 pagesRegression Modelling and Least-Squares: GSA Short Course: Session 1 Regressioncarles1972mmNo ratings yet
- Handouts Week01Document58 pagesHandouts Week01Abhishek SinghNo ratings yet
- PPT3 - Statistical Models in SimulationDocument38 pagesPPT3 - Statistical Models in SimulationRizky AmandaNo ratings yet
- Chapter5 PDFDocument37 pagesChapter5 PDFAreeba AshrafNo ratings yet
- The Derivation: MathematicDocument11 pagesThe Derivation: MathematicShaker HusienNo ratings yet
- Point EstimationDocument7 pagesPoint EstimationTvarita SurendarNo ratings yet
- 0.HUST ASB IntroDocument47 pages0.HUST ASB IntroLan Chi VũNo ratings yet
- Random Processes: Version 2, ECE IIT, KharagpurDocument8 pagesRandom Processes: Version 2, ECE IIT, KharagpurHarshaNo ratings yet
- Normal DistributionDocument15 pagesNormal DistributionMarcLorenz OrtegaNo ratings yet
- Chapter 5Document39 pagesChapter 5ARISHA 124No ratings yet
- Lecture 11Document12 pagesLecture 11B SRINATH ACHARYNo ratings yet
- 1 Lecture 5b: Probabilistic Perspectives On ML AlgorithmsDocument6 pages1 Lecture 5b: Probabilistic Perspectives On ML AlgorithmsJeremy WangNo ratings yet
- Lecture 1Document48 pagesLecture 1GauravNo ratings yet
- Probability Distributions in RDocument42 pagesProbability Distributions in RNaski KuafniNo ratings yet
- CH 8Document48 pagesCH 8marcoteran007No ratings yet
- Lecture5 PartitionspectralDocument14 pagesLecture5 Partitionspectralapi-3834272No ratings yet
- Lecture03 Discrete Random Variables Ver1Document37 pagesLecture03 Discrete Random Variables Ver1Hongjiang ZhangNo ratings yet
- Rules of DifferentiationDocument24 pagesRules of DifferentiationJordan RonquilloNo ratings yet
- Rules of Differentiation and Their Use in Comparative Statics - Alpha ChiangDocument24 pagesRules of Differentiation and Their Use in Comparative Statics - Alpha ChiangDanielDanielliNo ratings yet
- SY 2324 STM 002 Derivative of Log and Exp Func. TrigonometryDocument42 pagesSY 2324 STM 002 Derivative of Log and Exp Func. Trigonometrynicabanados555No ratings yet
- Chapter 2.4Document11 pagesChapter 2.4Foyshel RahmanNo ratings yet
- Chapter 2.4Document11 pagesChapter 2.4Atique FaisalNo ratings yet
- Chapter 02Document50 pagesChapter 02Jack Ignacio NahmíasNo ratings yet
- Week+4 RV RevisedDocument15 pagesWeek+4 RV RevisedAfiQah AzizNo ratings yet
- Tools 2022 05 26 22 32 24Document23 pagesTools 2022 05 26 22 32 24maxwell.karpzen99No ratings yet
- Primer 2Document10 pagesPrimer 2rahim.sihadjmohandNo ratings yet
- Lec22 PDFDocument8 pagesLec22 PDFjuanagallardo01No ratings yet
- EconometricsDocument40 pagesEconometricsLay ZhangNo ratings yet
- An Overview of Edward: A Probabilistic Programming System: Dustin Tran Columbia UniversityDocument34 pagesAn Overview of Edward: A Probabilistic Programming System: Dustin Tran Columbia UniversityStanislav SeNo ratings yet
- Probabilities For Machine Learning: Roland MemisevicDocument19 pagesProbabilities For Machine Learning: Roland MemisevicDenno SteinNo ratings yet
- Basic Exponent Laws With Integer Exponents-Explanation & PracticeDocument7 pagesBasic Exponent Laws With Integer Exponents-Explanation & PracticeLoise Durilag CajesNo ratings yet
- Learning-DemoDocument7 pagesLearning-DemoHome Workout PlanNo ratings yet
- CS 563 Advanced Topics in Computer Graphics Monte Carlo Integration: Basic ConceptsDocument38 pagesCS 563 Advanced Topics in Computer Graphics Monte Carlo Integration: Basic ConceptsNeha SameerNo ratings yet
- EN007001 Engineering Research Methodology: Statistical Inference: Bayesian InferenceDocument72 pagesEN007001 Engineering Research Methodology: Statistical Inference: Bayesian Inferenceคงเดช คํานึกNo ratings yet
- Lect 8Document30 pagesLect 8Kanika ManochaNo ratings yet
- Lecture 8: Boundary Integral Equations: CBMS Conference On Fast Direct SolversDocument20 pagesLecture 8: Boundary Integral Equations: CBMS Conference On Fast Direct SolversKavi YaNo ratings yet
- CS6785 HW2Document4 pagesCS6785 HW2darklanxNo ratings yet
- Week 7 Differentiation RulesDocument10 pagesWeek 7 Differentiation RulesCynthia PlazaNo ratings yet
- Nida Maryam - uPDATEDDocument12 pagesNida Maryam - uPDATEDHifza SaeedNo ratings yet
- MAT 271 Probability and Statistics Lecture 4: General Random VariablesDocument56 pagesMAT 271 Probability and Statistics Lecture 4: General Random VariablesSerkan Burak ÖRSNo ratings yet
- Harolds Stats Distributions Cheat Sheet 2022Document18 pagesHarolds Stats Distributions Cheat Sheet 2022Jack LondonNo ratings yet
- Probability Random Variables Results PVDocument49 pagesProbability Random Variables Results PVemaNo ratings yet
- Lecture01 Uppsala EQG 12Document39 pagesLecture01 Uppsala EQG 12Henz RabinoNo ratings yet
- Statistics BI: Models of Random Outcomes. What Is A Model?Document22 pagesStatistics BI: Models of Random Outcomes. What Is A Model?Pedro GouvNo ratings yet
- 17 MontecarloDocument35 pages17 MontecarloRafaela RibeiroNo ratings yet
- Lecture11 (Week 12) UpdatedDocument34 pagesLecture11 (Week 12) UpdatedBrian LiNo ratings yet
- Statistics For Traffic EngineersDocument55 pagesStatistics For Traffic EngineerssaliniNo ratings yet
- C 06 Anti DifferentiationDocument31 pagesC 06 Anti Differentiationebrahimipour1360No ratings yet
- 1.017/1.010 Class 11 Multivariate Probability: Multiple Random VariablesDocument3 pages1.017/1.010 Class 11 Multivariate Probability: Multiple Random VariablesDr. Ir. R. Didin Kusdian, MT.No ratings yet
- Quantitative Techniques For Managerial Decision - 1 (Qtmd1G21-1)Document35 pagesQuantitative Techniques For Managerial Decision - 1 (Qtmd1G21-1)banmaliNo ratings yet
- 1 Stat Superv ParametricDocument4 pages1 Stat Superv ParametricAshishAmitavNo ratings yet
- 4-Discrete, Induced, ProductDocument3 pages4-Discrete, Induced, ProductDmitri ZaitsevNo ratings yet
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Facial Emotion RecognitionDocument30 pagesFacial Emotion RecognitionAwatef MessaoudiNo ratings yet
- Deep Facial Expression Recognition: A Survey: Shan Li and Weihong Deng, Member, IEEEDocument25 pagesDeep Facial Expression Recognition: A Survey: Shan Li and Weihong Deng, Member, IEEEAwatef MessaoudiNo ratings yet
- Cours Systèmeembarqué3Document9 pagesCours Systèmeembarqué3Awatef MessaoudiNo ratings yet
- Output 41Document47 pagesOutput 41Awatef MessaoudiNo ratings yet
- Output 97Document56 pagesOutput 97Awatef MessaoudiNo ratings yet
- Output 59Document43 pagesOutput 59Awatef MessaoudiNo ratings yet
- Output 93Document57 pagesOutput 93Awatef MessaoudiNo ratings yet
- Output 18Document39 pagesOutput 18Awatef MessaoudiNo ratings yet
- Recognizing Facial Expressions Using A Shallow Convolutional Neural NetworkDocument12 pagesRecognizing Facial Expressions Using A Shallow Convolutional Neural NetworkAwatef MessaoudiNo ratings yet
- Output 95Document56 pagesOutput 95Awatef MessaoudiNo ratings yet
- Output 16Document39 pagesOutput 16Awatef MessaoudiNo ratings yet
- Output 42Document46 pagesOutput 42Awatef MessaoudiNo ratings yet
- Output 43Document46 pagesOutput 43Awatef MessaoudiNo ratings yet
- Output 12Document26 pagesOutput 12Awatef MessaoudiNo ratings yet
- Output 13Document27 pagesOutput 13Awatef MessaoudiNo ratings yet
- Output 11Document26 pagesOutput 11Awatef MessaoudiNo ratings yet
- Automated Facial Expression Recognition Using Deep Learning Techniques - An Overview (#657395) - 1125402Document15 pagesAutomated Facial Expression Recognition Using Deep Learning Techniques - An Overview (#657395) - 1125402Awatef MessaoudiNo ratings yet
- Output 63Document47 pagesOutput 63Awatef MessaoudiNo ratings yet
- Convolutional Neural Networks For Facial ExpressioDocument9 pagesConvolutional Neural Networks For Facial ExpressioAwatef MessaoudiNo ratings yet
- Dlvu Lecture12Document19 pagesDlvu Lecture12Awatef MessaoudiNo ratings yet
- Dlvu Lecture02Document39 pagesDlvu Lecture02Awatef MessaoudiNo ratings yet
- Dlvu Lecture06Document106 pagesDlvu Lecture06Awatef MessaoudiNo ratings yet
- Output 62Document45 pagesOutput 62Awatef MessaoudiNo ratings yet
- Dlvu Lecture01Document93 pagesDlvu Lecture01Awatef MessaoudiNo ratings yet
- Dlvu Lecture07Document59 pagesDlvu Lecture07Awatef MessaoudiNo ratings yet
- Dlvu Lecture08Document107 pagesDlvu Lecture08Awatef MessaoudiNo ratings yet
- Dlvu Lecture03Document27 pagesDlvu Lecture03Awatef MessaoudiNo ratings yet
- Dlvu Lecture09Document20 pagesDlvu Lecture09Awatef MessaoudiNo ratings yet
- Basic Industrial Engg.Document34 pagesBasic Industrial Engg.gaurav vermaNo ratings yet
- 8.334: StatMech II Problem Set #2Document2 pages8.334: StatMech II Problem Set #2bidsitlovNo ratings yet
- Discrete and Continuous Probability Distribution Functions and Their ApplicationsDocument2 pagesDiscrete and Continuous Probability Distribution Functions and Their ApplicationsSiva VarmaNo ratings yet
- Cps 8210 Assignment 2Document3 pagesCps 8210 Assignment 2Sarama Kamal SyedNo ratings yet
- Edinburgh Tram SystemDocument19 pagesEdinburgh Tram SystemAkash Kumar SuryawanshiNo ratings yet
- GARCH Models in Python 4Document30 pagesGARCH Models in Python 4visNo ratings yet
- Dynamic Trees in Data Structure PDFDocument6 pagesDynamic Trees in Data Structure PDFRASHMI DABRENo ratings yet
- UploadFile 9325Document412 pagesUploadFile 9325Ismael Abdulkarim AliNo ratings yet
- Algorithm Trading System ProjectDocument9 pagesAlgorithm Trading System Projectsataparamaulik1No ratings yet
- This Study Resource Was: CSE396 Final Exam Answer Key Spring 2016Document8 pagesThis Study Resource Was: CSE396 Final Exam Answer Key Spring 2016Zhihao LinNo ratings yet
- Security at The Transport LayerDocument5 pagesSecurity at The Transport LayerhemaNo ratings yet
- MT1008 CC02 Linear-Algebra Group-Report Topic-1Document33 pagesMT1008 CC02 Linear-Algebra Group-Report Topic-1Huỳnh Lê Việt HóaNo ratings yet
- Add Math Form 4Document4 pagesAdd Math Form 4Nor Hanina88% (25)
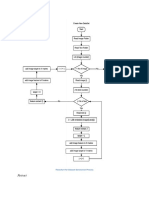
- Fextract: Flowchart For Dataset Generation ProcessDocument5 pagesFextract: Flowchart For Dataset Generation ProcessTanveer AkhtarNo ratings yet
- Chapter 3Document15 pagesChapter 3aisyahazaliNo ratings yet
- A Novel Numerical Algorithm Based On Galerkin-Petrov Time-Discretization Method For Solving Chaotic Nonlinear Dynamical SystemsDocument15 pagesA Novel Numerical Algorithm Based On Galerkin-Petrov Time-Discretization Method For Solving Chaotic Nonlinear Dynamical SystemsMuhammad Sabeel KhanNo ratings yet
- P1 Oct. 2022 PDFDocument28 pagesP1 Oct. 2022 PDFJohn HoltNo ratings yet
- DID101RDocument5 pagesDID101RWency BuiNo ratings yet
- Create Reference Model Controller With MATLAB Script - MATLAB & SimulinkDocument5 pagesCreate Reference Model Controller With MATLAB Script - MATLAB & Simulinkjose diazNo ratings yet
- 32 BitDocument21 pages32 Bitammayi9845_930467904No ratings yet
- Cryptography and Its Types - GeeksforGeeksDocument2 pagesCryptography and Its Types - GeeksforGeeksGirgio Moratti CullenNo ratings yet
- NLP Review Classfication: Knowledge Solutions IndiaDocument11 pagesNLP Review Classfication: Knowledge Solutions IndiaSavita GirigoudarNo ratings yet
- Operational Management AssignmentDocument8 pagesOperational Management AssignmentLatambhat GmailNo ratings yet
- Binary Search Trees: CS 302 - Data StructuresDocument106 pagesBinary Search Trees: CS 302 - Data StructurespradeepaNo ratings yet
- Worksheet 3Document2 pagesWorksheet 3Jillian TanNo ratings yet
- MCQ For UnipuneDocument47 pagesMCQ For Unipunebhupesh joshi100% (2)
- Lead4ward IQ ToolDocument14 pagesLead4ward IQ TooldowntownameerNo ratings yet
- Lesson 2 Solving Systems by Substitution - MasteryDocument2 pagesLesson 2 Solving Systems by Substitution - MasteryMariana Ortiz IsaacsNo ratings yet