You might also like
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Ttroubleshooting C10, C12, C15 y C18Document388 pagesTtroubleshooting C10, C12, C15 y C18Zamir Andres Sencio100% (12)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Manual Completo Do Modbus No CLPDocument126 pagesManual Completo Do Modbus No CLPHudson CostaNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- FM 200 Clean Agent SystemDocument18 pagesFM 200 Clean Agent SystemMohamed AdelNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- LKLDocument35 pagesLKLJafar ShadiqNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- ELECTRICITY WORKSHEETDocument3 pagesELECTRICITY WORKSHEETadarsh bhushan0% (1)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Scanner HSMT-Flex - en PDFDocument3 pagesScanner HSMT-Flex - en PDFMadhu BabuNo ratings yet
- Cx4 VHF AntennaDocument3 pagesCx4 VHF AntennaclodNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- N-Channel Enhancement Mode MOSFET: Product SummaryDocument5 pagesN-Channel Enhancement Mode MOSFET: Product SummaryTony RodriguesNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Klippel-Visualization and Analysis of Loudspeaker Vibration PDFDocument2 pagesKlippel-Visualization and Analysis of Loudspeaker Vibration PDFmerrickNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- 1.1 BCM-200 ManualDocument53 pages1.1 BCM-200 ManualNiroshan AthaudaNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Sony HCD Ne5 Manual PDFDocument32 pagesSony HCD Ne5 Manual PDFDiego C. FigueroaNo ratings yet
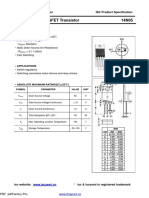
- Isc N-Channel MOSFET Transistor 14N05: INCHANGE Semiconductor Product SpecificationDocument2 pagesIsc N-Channel MOSFET Transistor 14N05: INCHANGE Semiconductor Product SpecificationYASIRNo ratings yet
- Ieee Nems 2010 Accepted PapersDocument24 pagesIeee Nems 2010 Accepted PapersvieffejonesNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Distribution Business Unit Cummins Field Service Report Srinivasa Sales & Service Private Limited, OdishaDocument1 pageDistribution Business Unit Cummins Field Service Report Srinivasa Sales & Service Private Limited, OdishaSantosh Kumar MahantyNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Xie Chang BLDC InfinionDocument18 pagesXie Chang BLDC InfinionFloeru SchrottNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Wintrafo 30052020Document2,694 pagesWintrafo 30052020Oscar RamirezNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Optimizing P-Channels for Switching and RectificationDocument5 pagesOptimizing P-Channels for Switching and RectificationTim PriceNo ratings yet
- OKI Manuals LIST Aug2014Document31 pagesOKI Manuals LIST Aug2014Jaime RiosNo ratings yet
- CrcwikiDocument8 pagesCrcwikiPratik MahajanNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Engineering Standard: IPS-E-EL-100Document137 pagesEngineering Standard: IPS-E-EL-100Fatholla SalehiNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- ASHRAE Journal - BAS Control of VAV LabsDocument12 pagesASHRAE Journal - BAS Control of VAV Labsenlightened1718No ratings yet
- Manual de Partes C-15 Serp5269!02!01-AllDocument862 pagesManual de Partes C-15 Serp5269!02!01-AllbettoNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- OMTCO Top 200 SAM Terms A Glossary of Software Asset Management and Licensing TermsDocument36 pagesOMTCO Top 200 SAM Terms A Glossary of Software Asset Management and Licensing TermsRavi Raman100% (1)
- LM317 AppnoteDocument6 pagesLM317 AppnoteLucas Matías JuarezNo ratings yet
- 4L-PB351G-L60D & 4L-PB531G-L60D SFP BiDi 1000BASE-BXDocument4 pages4L-PB351G-L60D & 4L-PB531G-L60D SFP BiDi 1000BASE-BXGabriel SilveiraNo ratings yet
- Dvd9 Size: 2.86 GB Download-Tải về: Trích:1. 2. 3. 4Document8 pagesDvd9 Size: 2.86 GB Download-Tải về: Trích:1. 2. 3. 4dunglxNo ratings yet
- EEE 133 1s2021 Problem Set 2Document3 pagesEEE 133 1s2021 Problem Set 2Roland Paul PrincipeNo ratings yet
- Remote Terminal Unit (RTU) Hardware Design PDFDocument4 pagesRemote Terminal Unit (RTU) Hardware Design PDFMootez MnassriNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- Ecp455 - Lab 7 - Spe-1000-13 Tests Part IDocument4 pagesEcp455 - Lab 7 - Spe-1000-13 Tests Part IKyran WonNo ratings yet
- TAS-331DG Data Sheet 4921220036 UKDocument8 pagesTAS-331DG Data Sheet 4921220036 UKAkhilNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)